PROCEDIMIENTO Y DISPOSITIVO PARA SOLDADURA POR LASER REMOTO ASISTIDA POR ROBOT CON UN CONTROL SIMPLIFICADO DE LA DIRECCION DE FOCALIZACION DEL HAZ DE RAYO LASER.
Procedimiento de soldadura por láser de una estructura constituida por unos elementos de planchas de metal,
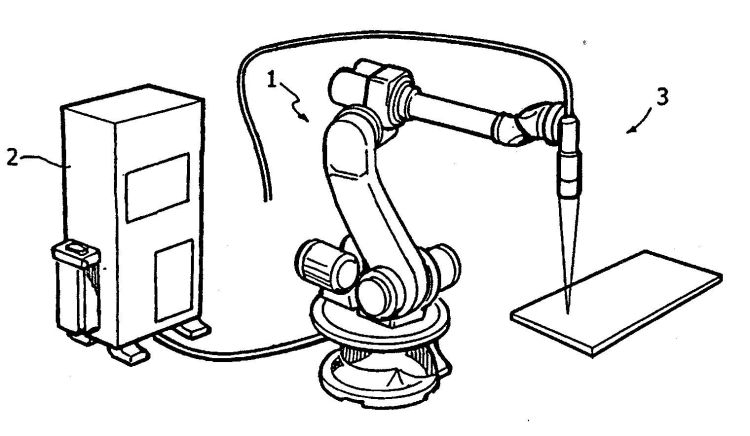
en el cual: - un robot de manipulación de múltiples ejes (1) está dispuesto incluyendo una pluralidad de motores eléctricos que controlan el movimiento de los elementos del robot alrededor de dichos ejes junto con una unidad de control electrónico programable (2) para programar dichos motores eléctricos a fin de desplazar un elemento terminal del robot en cualquier posición, con cualquier orientación y en cualquier trayectoria en el interior de un volumen espacial determinado de tres dimensiones, - sobre dicho elemento terminal del robot de manipulación (1) está montado un dispositivo accesorio (3) para focalizar un haz de rayo láser que proviene de una fuente de láser, estando diseñado dicho dispositivo para orientar el haz de rayo láser focalizado (F), oscilándolo alrededor de un eje de oscilación (8), - dicho robot de manipulación (1) está controlado de forma que desplaza el dispositivo accesorio (3) anteriormente mencionado a lo largo de una trayectoria (L) en la proximidad, aunque no adyacente a, diversas áreas de la estructura que se tiene que soldar, - mientras el dispositivo accesorio (3) anteriormente mencionado es desplazado a lo largo de dicha trayectoria determinada (L), la dirección del haz de rayo láser focalizado (F) es variada por medio de dicho dispositivo accesorio (3) a fin de desplazar el área (W) de la estructura que se tiene que soldar, que es iluminada por el haz de rayo láser focalizado (F), a lo largo de una trayectoria o a una velocidad que no dependen directamente de la trayectoria de desplazamiento ni de la velocidad del dispositivo accesorio (3) anteriormente mencionado.
Tipo: Resumen de patente/invención.
Solicitante: COMAU S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA RIVALTA 30,10095 GRUGLIASCO (TORINO).
Inventor/es: MENIN, ROBERTO.
Fecha de Publicación: .
Fecha Solicitud PCT: 29 de Marzo de 2005.
Fecha Concesión Europea: 3 de Octubre de 2007.
Clasificación PCT:
- B23K26/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 26/00 Trabajo por rayos láser, p. ej. soldadura, corte o taladrado. › Alineación, apuntado o focalización automáticos del haz de rayos láser, p. ej. utilizando la luz difundida de vuelta.
- B23K26/08 B23K 26/00 […] › Dispositivos que tiene un movimiento relativo entre el haz de rayos y la pieza.
- B23K26/10 B23K 26/00 […] › con un soporte fijo.
- B23K26/20 B23K 26/00 […] › Unión (soldadura sin fusión por energía radiante B23K 1/005; unión de elementos plásticos preformados por calentamiento mediante láser B29C 65/16).
- G05B19/416 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]
Procedimiento de ajuste del consumo de energía de dos herramientas durante el mecanizado de extremos de secciones de tubo, del 16 de Enero de 2019, de Rattunde AG: Procedimiento de mecanizado de una sección de perfil largo que tiene una longitud real (L1) y un primer y un segundo extremo (3, 3'), donde […]
Procedimiento y dispositivo para soldadura por láser remoto asistida por robot con un control simplificado de la dirección de focalización del haz de rayo láser, del 11 de Abril de 2018, de COMAU S.P.A.: Procedimiento de soldadura por láser de una estructura constituida por unos elementos de planchas de metal, en el cual: - un robot de manipulación […]
Método de mando y control del motor eléctrico de una unidad de automatización y sistema conectado, del 26 de Julio de 2017, de GIMA TT S.r.l: Método para optimizar el mando y control de un motor eléctrico de una unidad de automatización , que comprende un elemento mecánico […]
Perforación con sensor de empuje adaptativo, del 12 de Julio de 2017, de THE BOEING COMPANY: Un aparato para realizar una operación de perforación sobre un apilamiento de materiales, comprendiendo el aparato: un alojamiento ; […]
Método para mover una herramienta de una máquina de CNC sobre una superficie, del 31 de Mayo de 2017, de FIDIA S.P.A.: Método para mover una herramienta de una máquina de CNC sobre una superficie en el que la máquina de CNC está dotada de una unidad de sensor , que […]
 Procedimiento de control de un robot de taladrado y robot de taladrado que utiliza el procedimiento, del 28 de Diciembre de 2016, de Safran Nacelles: Procedimiento de control de un robot de taladrado, del tipo que comprende una estructura mecánica pilotada que permite colocar una herramienta de taladrado en una secuencia […]
Procedimiento de control de un robot de taladrado y robot de taladrado que utiliza el procedimiento, del 28 de Diciembre de 2016, de Safran Nacelles: Procedimiento de control de un robot de taladrado, del tipo que comprende una estructura mecánica pilotada que permite colocar una herramienta de taladrado en una secuencia […]
Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente, del 26 de Febrero de 2014, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de regulador para más de dos unidades de accionamiento acopladas mecánicamente a unelemento móvil , en donde la estructura de regulador presenta […]