TELEMANIPULADOR.
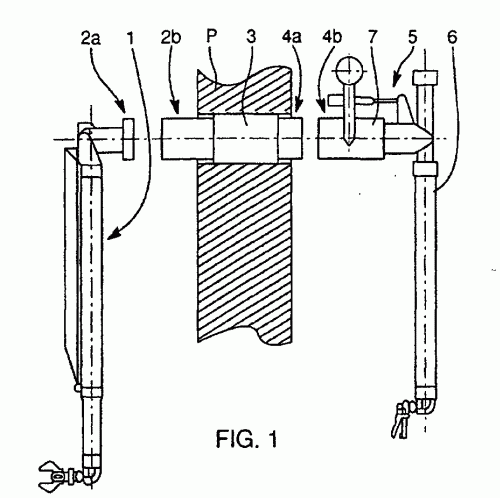
Telemanipulador, del tipo que comprende un brazo maestro (16) y un brazo esclavo (11) destinado a reproducir los movimientos del brazo maestro (16);
estando dicho brazo esclavo (11) situado en el interior de un recinto de confinamiento y siendo apto para ser desenganchado, estando dicho brazo maestro (16) situado en el exterior del recinto de confinamiento y estando los indicados brazos maestro (16) y esclavo (11) conectados por un mecanismos (13) que atraviesa una pared (P) del recinto de confinamiento; estando el indicado brazo maestro (16) conectado con un tubo de conexión (17) con el indicado mecanismo (13) que atraviesa la pared (P) del recinto de confinamiento; y estando el mecanismo que atraviesa la pared (13) montado de forma fija en la pared (P) y presentando una primera interfaz 12b, 12a de conexión con el brazo esclavo (11) y una segunda interfaz (14a, 14b) con el tubo de conexión (17), caracterizado porque el brazo maestro (16) y el tubo de conexión (17) están conectados a medios (15a, y 15b) de solidarización y de desolidarización determinados para permitir sus conexiones o desconexiones modulares, con el fin de facilitar el mantenimiento del telemanipulador y aumentar con ello la productividad.
Tipo: Resumen de patente/invención.
Solicitante: SOCIETE D'INNOVATIONS TECHNIQUES SIT.
Nacionalidad solicitante: Francia.
Dirección: Z.I. NORD II,86100 CHATELLERAULT.
Inventor/es: GARNIER, ANDRE.
Fecha de Publicación: .
Fecha Concesión Europea: 12 de Octubre de 2005.
Clasificación Internacional de Patentes:
- B25J3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
- G21F7/06 FISICA. › G21 FISICA NUCLEAR; TECNICA NUCLEAR. › G21F PROTECCION CONTRA LOS RAYOS X, RAYOS GAMMA, RADIACIONES CORPUSCULARES O BOMBARDEOS DE PARTICULAS; TRATAMIENTO DE MATERIALES CONTAMINADOS POR LA RADIACTIVIDAD; DISPOSICIONES PARA LA DESCONTAMINACION (protección contra las radiaciones por medios farmacéuticos A61K 8/00, A61Q 17/04; en los vehículos espaciales B64G 1/54; asociada con un reactor G21C 11/00; asociada con un tubo de rayos X H01J 35/16; asociada con un aparato de rayos X H05G 1/02). › G21F 7/00 Celdas o cámaras blindadas. › Combinación estructural con un aparato de telecontrol, p. ej. con manipuladores.
Patentes similares o relacionadas:
Dispositivo de control para un instrumento quirúrgico, del 26 de Febrero de 2020, de Creo Medical Limited: Un mecanismo de rotación de instrumento para un dispositivo de alcance quirúrgico, comprendiendo el mecanismo de rotación de instrumento: una carcasa […]
Sistema médico de obtención de imágenes con brazo mecánico, del 19 de Junio de 2019, de Telefield Medical Imaging Limited: Un sistema médico de obtención de imágenes, con un brazo mecánico que incluye un sensor de posición y un sensor de presión montado en el brazo mecánico , dicho […]
Sistemas de soporte de brazo adaptativos y métodos de uso, del 21 de Marzo de 2018, de Enhance Technologies, LLC: Un sistema para soportar un brazo (Ar) de un usuario (U), incluyendo: un arnés configurado para ser llevado puesto […]
Plataforma robótica móvil altamente personalizable para redes de sensores móviles, del 28 de Octubre de 2016, de CASTELLÓ FERRER, Eduardo: Plataforma robótica móvil altamente personalizable para redes de sensores móviles. La plataforma comprende al menos una pieza de su cuerpo […]
ESTRUCTURA DE PLATAFORMA ROBÓTICA, del 21 de Mayo de 2015, de ANTEL USA INC: La invención se refiere a una estructura de plataforma robótica preferentemente aplicable en trabajos manuales con niños y adolescentes, que permite la […]
 Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
 DISPOSITIVO DE MOVIMIENTO PARA ROBOTS, del 1 de Abril de 2013, de UNIVERSIDAD CASTILLA - LA MANCHA: Dispositivo de movimiento para robots que comprende un primer mecanismo plano que permite un movimiento horizontal (MH) y vertical (MV) de un punto extremo (P) situado […]
DISPOSITIVO DE MOVIMIENTO PARA ROBOTS, del 1 de Abril de 2013, de UNIVERSIDAD CASTILLA - LA MANCHA: Dispositivo de movimiento para robots que comprende un primer mecanismo plano que permite un movimiento horizontal (MH) y vertical (MV) de un punto extremo (P) situado […]
 METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]
METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]