DISPOSITIVO DE MOVIMIENTO PARA ROBOTS.
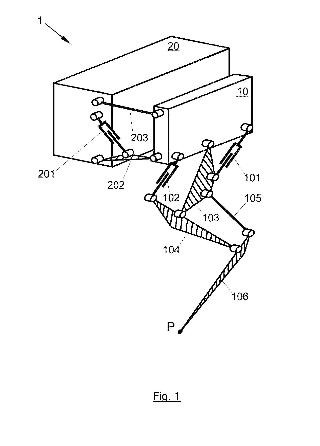
Dispositivo de movimiento para robots que comprende un primer mecanismo plano (100) que permite un movimiento horizontal (MH) y vertical (MV) de un punto extremo (P) situado en el mismo mediante un primer actuador (101) y un segundo actuador (102) respectivamente.
Dicho dispositivo (1) comprende adicionalmente un segundo mecanismo plano (200) que se articula respecto a un chasis principal (20) y respecto a un chasis auxiliar (10) sobre el que se articula a su vez el primer mecanismo plano (100), donde dicho segundo mecanismo plano (200) permite un movimiento lateral (ML) del punto extremo (P) por medio de un tercer actuador (201). El primer (100) y el segundo mecanismo plano (200) se encuentran configurados para proporcionar una trayectoria rectilínea del punto extremo (P) para cada uno de sus movimientos horizontal, vertical y lateral cuando se opera uno de los actuadores (101, 102, 201) y los otros dos permanecen inactivos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031988.
Solicitante: UNIVERSIDAD CASTILLA - LA MANCHA.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ RODRIGUEZ,ANTONIO, GONZALEZ RODRIGUEZ,ANGEL GASPAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
Fragmento de la descripción:
Dispositivo de movimiento para robots.
Objeto de la invención La presente invención se refiere a un dispositivo de movimiento para robots que presenta tres grados de libertad, correspondientes a los movimientos espaciales; horizontal, vertical y lateral, cada uno de ellos gobernado por un actuador propio. Donde los mecanismos que llevan a cabo tales movimientos han sido especialmente diseñados para facilitar el control de movimiento, incrementar la frecuencia de movimiento, ofrecer mayor protección frente a golpes, así como optimizar y economizar la elección de componentes.
La presente invención resulta especialmente idónea para permitir el movimiento de patas y brazos mecánicos de robots, aunque puede ser usado también en máquinas herramienta, como por ejemplo centros de mecanizado, o incluso como grúa para vehículos.
Antecedentes de la invención En la actualidad se conocen numerosos diseños de patas o brazos mecánicos para su empleo en robots. Una gran parte de dichos diseños siguen esquemas biomiméticos que se llevan a la práctica mediante complejos dispositivos de movimiento de elevado coste y difícil control, como por ejemplo los que incorporan el robot ASIMO
o el Big-Dog, entre otros.
El estado del arte comprende no obstante, otros dispositivos de movimiento que han sido desarrollados con el objeto de simplificar los diseños anteriores, Un ejemplo de ellos es el representado en el artículo Desing and simulation of an easy operating leg for walking robots de Antonio González Rodríguez y otros, divulgado en el IEEE 2009 International Conference on Mechatronics, Málaga 2009.
En este artículo se muestra una pata para robots, cuyo diseño desglosa los movimientos horizontal y vertical a través de un mecanismo plano. El movimiento horizontal se gobierna mediante un motor rotativo de corriente continua, mientras que el movimiento vertical se gobierna modificando la longitud de una de las barras del mecanismo mediante el empleo de un actuador lineal. Dicho mecanismo comprende un punto extremo que, bajo unas condiciones de funcionamiento normal preestablecidas por el usuario, presenta una trayectoria recta cuando uno de los actuadores permanece activo y el otro inactivo.
La presente invención representa una mejora del dispositivo de movimiento anterior que consiste en la optimización del mecanismo de movimiento horizontal y vertical del mismo y en la incorporación de un segundo mecanismo que permite el posicionamiento del punto extremo en un punto cualquiera del espacio de movimiento lateral. Asimismo, los dos mecanismos de la presente invención se encuentran configurados para proporcionar, bajo las condiciones de funcionamiento normal, una trayectoria rectilínea del punto extremo para cada uno de sus movimientos horizontal, vertical y lateral cuando se opera uno de los actuadores y los otros dos permanecen inactivos. Este último aspecto facilita enormemente la coordinación de los distintos actuadores del dispositivo a la hora de realizar una determinada acción, y en consecuencia hace que el control resulte mucho más sencillo.
Así pues, el dispositivo de movimiento de la presente invención ofrece un gran número de ventajas con respecto a los dispositivos conocidos, tal y como se menciona a continuación. Para empezar, su sencillez de control permite elevar la frecuencia de acciones y por lo tanto la velocidad de movimiento. A su vez, otra ventaja que se deriva de la configuración constructiva de la presente invención es que permite elegir los distintos actuadores, específicamente para cada uno de los movimientos horizontal, vertical y lateral, ya que cada uno de éstos tiene su propio actuador, con lo que se puede optimizar la potencia instalada del dispositivo. Finalmente, la presente invención permite trabajar exclusivamente con actuadores lineales, los cuales resultan más económicos que los motores rotativos, en aquellos casos que se requiera actuación con elevada precisión y ausencia de holguras apreciables.
Descripción de la invención El dispositivo de movimiento para robots de la presente invención es del tipo de los que comprende un primer mecanismo plano que permite un movimiento horizontal y un movimiento vertical de un punto extremo situado en el mismo mediante un primer actuador y un segundo actuador respectivamente. Dicho dispositivo comprende adicionalmente un segundo mecanismo plano que se articula respecto a un chasis principal y respecto a un chasis auxiliar sobre el que se articula a su vez el primer mecanismo plano. El segundo mecanismo plano permite a su vez un movimiento lateral del punto extremo por medio de un tercer actuador.
Asimismo, el primer y el segundo mecanismo plano se encuentran configurados para proporcionar una trayectoria rectilínea del punto extremo para cada uno de sus movimientos horizontal, vertical y lateral cuando se opera uno de los actuadores y los otros dos permanecen inactivos. Ello tiene lugar bajo unas condiciones de funcionamiento normal preestablecidas por el usuario previamente al diseño del dispositivo y teniendo en cuenta el uso final del mismo. Generalmente las condiciones de trabajo normal se establecen para los movimientos más ES 2 399 438 Al
repetitivos de funcionamiento, si bien caben otras muchas posibilidades. En cuanto a la trayectoria rectilínea, debe interpretarse que ésta puede admitir desviaciones o porcentajes de error propios del diseño, tal y como se muestra en el ejemplo numérico de la presente memoria.
De acuerdo a un primer caso de realización preferente el primer mecanismo plano y el segundo mecanismo plano son ortogonales, siendo también posible que éstos presenten entre ellos cualquier otro ángulo comprendido entre 0º y 90º que permita un movimiento lateral del dispositivo. Asimismo, según un primer caso de realización preferente todos los actuadores son lineales.
El primer mecanismo plano comprende un primer juego de barras formado por:
• el chasis auxiliar;
• el primer actuador y el segundo actuador, de tipo lineal, unidos al chasis auxiliar mediante una articulación C y una articulación B respectivamente;
• una primera pieza unida al chasis auxiliar mediante una articulación A y unida al actuador mediante una articulación D;
• una segunda pieza unida al actuador mediante una articulación E y unida a la primera pieza mediante una articulación F;
• una tercera pieza unida a la primera pieza mediante una articulación G; y
• una cuarta pieza unida a la segunda pieza mediante una articulación H y unida a la tercera pieza mediante una articulación I, encontrándose sobre dicha cuarta pieza el punto extremo.
El movimiento horizontal del punto extremo, de acuerdo a la configuración del primer mecanismo plano descrita anteriormente, se obtiene mediante:
• el chasis auxiliar, actuando en calidad de barra fija;
• la primera pieza, actuando en calidad de barra motriz, dicha primera pieza configurada para transmitir el movimiento del primer actuador;
• el actuador en estado inactivo, actuado en calidad de barra seguidora; y
• la segunda pieza, actuando en calidad de barra de conexión.
A su vez, el movimiento vertical del punto extremo, de acuerdo a la configuración del primer mecanismo plano descrita anteriormente, se obtiene mediante:
• el chasis auxiliar, el actuador en estado inactivo y la primera pieza, actuando en calidad de barra fija;
• la segunda pieza, actuando en calidad de barra motriz, dicha segunda pieza configurada para transmitir el movimiento del segundo actuador;
• la tercera pieza, actuando en calidad de barra seguidora; y
• la cuarta pieza, actuando en calidad de barra de conexión. El segundo mecanismo plano comprende un segundo juego de barras formado por:
• el chasis principal;
• una quinta pieza unida al chasis principal mediante una articulación S;
• una sexta pieza unida al chasis principal mediante una articulación Q; y
• el chasis auxiliar unido a la quinta pieza mediante una articulación U y unido a la sexta pieza mediante una articulación V.
El movimiento lateral del punto extremo, de acuerdo a la configuración del segundo mecanismo plano descrita anteriormente, se obtiene mediante:
• el chasis principal, actuando en calidad de barra fija;
• la quinta pieza, actuando en calidad de barra motriz, dicha quinta pieza configurada para transmitir el movimiento del tercer actuador, donde:
o dicho tercer actuador, de tipo lineal, se encuentra unido al chasis principal mediante una articulación y a la quinta pieza mediante una articulación;...
Reivindicaciones:
1. Dispositivo de movimiento para robots que comprende:
• un primer mecanismo plano (100) que permite un movimiento horizontal (MH) y un movimiento vertical (MV) de un punto extremo (P) situado en el mismo mediante un primer actuador (101) y un segundo actuador
(102) respectivamente; dicho dispositivo (1) caracterizado porque comprende:
• un segundo mecanismo plano (200) que se articula respecto a un chasis principal (20) y respecto a un chasis auxiliar (10) sobre el que se articula a su vez el primer mecanismo plano (100) , donde dicho segundo mecanismo plano (200) permite un movimiento lateral (ML) del punto extremo (P) por medio de un tercer actuador (201) ;
donde:
• el primer (100) y el segundo mecanismo plano (200) se encuentran configurados para proporcionar una trayectoria rectilínea del punto extremo (P) para cada uno de sus movimientos horizontal, vertical y lateral cuando se opera uno de los actuadores (101, 102, 201) y los otros dos permanecen inactivos.
2. Dispositivo de movimiento para robots según la reivindicación 1 caracterizado porque el primer mecanismo plano (100) y el segundo mecanismo plano (200) son ortogonales.
3. Dispositivo de movimiento para robots según cualquiera de las reivindicaciones 1 a 2 caracterizado porque todos los actuadores (101, 102, 201) son lineales.
4. Dispositivo de movimiento para robots según cualquiera de las reivindicaciones 1 a 3 caracterizado porque el primer mecanismo plano (100) comprende un primer juego de barras (10, 101, 102, 103, 104, 105, 106) formado por:
• el chasis auxiliar (10) ;
• el primer actuador (101) y el segundo actuador (102) , de tipo lineal, unidos al chasis auxiliar (10) mediante una articulación (C) y una articulación (B) respectivamente;
• una primera pieza (103) unida al chasis auxiliar (10) mediante una articulación (A) y unida al actuador (101) mediante una articulación (D) ;
• una segunda pieza (104) unida al actuador (102) mediante una articulación (E) y unida a la primera pieza
(103) mediante una articulación (F) ;
• una tercera pieza (105) unida a la primera pieza (104) mediante una articulación (G) ; y
• una cuarta pieza (106) unida a la segunda pieza (104) mediante una articulación (H) y unida a la tercera pieza (105) mediante una articulación (I) , encontrándose sobre dicha cuarta pieza (106) el punto extremo (P) .
5. Dispositivo de movimiento para robots según la reivindicación 4 caracterizado porque el movimiento horizontal (MH) del punto extremo (P) se obtiene mediante:
• el chasis auxiliar (10) , actuando en calidad de barra fija;
• la primera pieza (103) , actuando en calidad de barra motriz, dicha primera pieza (103) configurada para transmitir el movimiento del primer actuador (101) ;
• el actuador (102) en estado inactivo, actuado en calidad de barra seguidora; y
• la segunda pieza (104) , actuando en calidad de barra de conexión.
6. Dispositivo de movimiento para robots según la reivindicación 4 caracterizado porque el movimiento vertical (MV) del punto extremo (P) se obtiene mediante:
• el chasis auxiliar (10) , el actuador (101) en estado inactivo y la primera pieza (103) , actuando en calidad de barra fija;
• la segunda pieza (104) , actuando en calidad de barra motriz, dicha segunda pieza (104) configurada para transmitir el movimiento del segundo actuador (102) ;
• la tercera pieza (105) , actuando en calidad de barra seguidora; y
• la cuarta pieza (106) , actuando en calidad de barra de conexión.
ES 2 399 438 Al
7. Dispositivo de movimiento para robots según cualquiera de las reivindicaciones 1 a 6 caracterizado porque el segundo mecanismo plano (200) comprende un segundo juego de barras (20, 202, 203, 10) formado 5 por:
• el chasis principal (20) ;
• una quinta pieza (202) unida al chasis principal (20) mediante una articulación (S) ;
• una sexta pieza (203) unida al chasis principal (20) mediante una articulación (Q) ; y
• el chasis auxiliar (10) unido a la quinta pieza (202) mediante una articulación (U) y unido a la sexta pieza 10 (203) mediante una articulación (V) .
8. Dispositivo de movimiento para robots según la reivindicación 7 caracterizado porque el movimiento lateral (ML) del punto extremo (P) se obtiene mediante:
• el chasis principal (20) , actuando en calidad de barra fija;
• la quinta pieza (202) , actuando en calidad de barra motriz, dicha quinta pieza (202) configurada para 15 transmitir el movimiento del tercer actuador (201) , donde:
o dicho tercer actuador (201) , de tipo lineal, se encuentra unido al chasis principal (20) mediante una articulación (R) y a la quinta pieza (202) mediante una articulación (T) ;
• la sexta pieza (203) , actuando en calidad de barra seguidora; y
• el chasis auxiliar (10) , actuando en calidad de barra de conexión. 20
ES 2 399 438 Al
ES 2 399 438 Al
Patentes similares o relacionadas:
Dispositivo de control para un instrumento quirúrgico, del 26 de Febrero de 2020, de Creo Medical Limited: Un mecanismo de rotación de instrumento para un dispositivo de alcance quirúrgico, comprendiendo el mecanismo de rotación de instrumento: una carcasa […]
Sistema médico de obtención de imágenes con brazo mecánico, del 19 de Junio de 2019, de Telefield Medical Imaging Limited: Un sistema médico de obtención de imágenes, con un brazo mecánico que incluye un sensor de posición y un sensor de presión montado en el brazo mecánico , dicho […]
Sistemas de soporte de brazo adaptativos y métodos de uso, del 21 de Marzo de 2018, de Enhance Technologies, LLC: Un sistema para soportar un brazo (Ar) de un usuario (U), incluyendo: un arnés configurado para ser llevado puesto […]
Plataforma robótica móvil altamente personalizable para redes de sensores móviles, del 28 de Octubre de 2016, de CASTELLÓ FERRER, Eduardo: Plataforma robótica móvil altamente personalizable para redes de sensores móviles. La plataforma comprende al menos una pieza de su cuerpo […]
ESTRUCTURA DE PLATAFORMA ROBÓTICA, del 21 de Mayo de 2015, de ANTEL USA INC: La invención se refiere a una estructura de plataforma robótica preferentemente aplicable en trabajos manuales con niños y adolescentes, que permite la […]
 Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
TELEMANIPULADOR., del 16 de Abril de 2006, de SOCIETE D'INNOVATIONS TECHNIQUES SIT: Telemanipulador, del tipo que comprende un brazo maestro y un brazo esclavo destinado a reproducir los movimientos del brazo maestro ; estando […]
 METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]
METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]