SISTEMA DE REFERENCIA PARA POSICIONAR UN VEHICULO BASADO EN LA COMUNICACION.
ESTA INVENCION SE REFIERE A UN SISTEMA DE REFERENCIA PARA POSICIONAR UN VEHICULO BASADO EN LA COMUNICACION QUE COMPRENDE UN TRAYECTO DE VEHICULO.
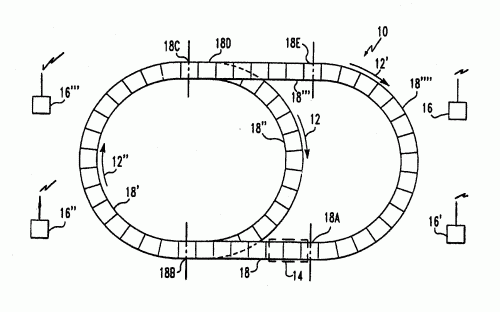
ESTE TRAYECTO DE VEHICULO ESTA DIVIDIDO EN REGIONES, QUE COMPRENDEN UNA PARTE DEL TRAYECTO DE VEHICULO. CADA PARTE DEL TRAYECTO DE VEHICULO CONTENIDA EN UNA REGION RESPECTIVA ESTA DEFINIDA POR UNO O VARIOS SEGMENTOS. SE IDENTIFICA LA POSICION DE UN VEHICULO SOBRE EL TRAYECTO DE VEHICULO POR UN SISTEMA DE COORDENADAS LOCAL S XYZ , REPRESENT ANDO S UN IDENTIFICADOR DE VEHICULO, REPRESENTANDO X UNA REGION ESPECIFICA, REPRESENTADO Y UN SEGMENTO ESPECIFICO CONTENIDO EN DICHA REGION, Y REPRESNETANDO Z LA POSI CION DEL VEHICULO EN ESTE SEGMENTO ESPECIFICO. EL TRAYECTO DE VEHICULO PUEDE SER REPRESENTADO EN UN MAPA. CADA UNO DE LOS SEGMENTOS PUEDE IDENTIFICARSE POR UNA CADENA DE CARACTERES QUE COMPRENDE LOS ELEMENTOS QUE SE REFIEREN A LA REGION EN LA CUAL SE ENCUENTRA EL SEGMENTO Y UN NOMBRE DE SEGMENTO. EL SISTEMA PUEDE COMPRENDER VARIOS ORDENADORES QUE SOLO PRESENTAN UNA PARTE DEL MAPA. ESTA INVENCION SE REFIERE TAMBIEN A UN PROCEDIMIENTO PARA LA IDENTIFICACION DE LA POSICION DE UN VEHICULO SOBRE UN TRAYECTO DE VEHICULO.
Tipo: Resumen de patente/invención.
Solicitante: ABB DAIMLER-BENZ TRANSPORTATION (TECHNOLOGY) GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SAATWINKLER DAMM 43,13627 BERLIN.
Inventor/es: WALSH, ROBERT, E., GRECO, JOSEPH, A., II.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Febrero de 1998.
Fecha Concesión Europea: 29 de Agosto de 2001.
Clasificación Internacional de Patentes:
- B61L27/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › Sistemas centrales de control del tráfico.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Países PCT: Suiza, Alemania, España, Francia, Reino Unido, Italia, Liechtensein, Suecia, Oficina Europea de Patentes, Armenia, Azerbayán, Bielorusia, Ghana, Gambia, Kenya, Kirguistán, Kazajstán, Lesotho, República del Moldova, Malawi, Federación de Rusia, Sudán, Tayikistán, Turkmenistán, Uganda, Zimbabwe, Burkina Faso, Benin, República Centroafricana, Congo, Costa de Marfil, Camerún, Gabón, Guinea, Malí, Mauritania, Niger, Senegal, Chad, Togo, Organización Regional Africana de la Propiedad Industrial, Swazilandia, Organización Africana de la Propiedad Intelectual, Organización Eurasiática de Patentes.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]