SISTEMA DE GUIADO PARA MOVIMIENTO AUTÓNOMO DE VEHÍCULOS EN ENTORNOS ESTRUCTURADOS.
El objetivo de la invención es un sistema de guiado de vehículos autónomos mediante cámaras y/o fotodetectores para seguir una trayectoria,
que se determina por un conjunto de emisores láser dispuestos en un entorno estructurado, por ejemplo, en los distintos pasillos de un invernadero, y que determina la trayectoria a seguir.
Para el establecimiento de la trayectoria a seguir, se dispone de diversos emisores láser colocados en los pasillos del invernadero, que estarán activos en función de los pasillos que deba recorrer el vehículo para describir la trayectoria prevista.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201101119.
Solicitante: UNIVERSIDAD DE ALMERIA.
Nacionalidad solicitante: España.
Inventor/es: SANCHEZ HERMOSILLA LOPEZ,JULIAN, GUZMAN SANCHEZ,JOSE LUIS, RODRIGUEZ DIAZ,FRANCISCO, GONZALEZ SANCHEZ,RAMON, BERENGUEL SORIA,MANUEL, GARCÍA DONAIRE,Julián, PAWLOWSKI,Andrzej, LÓPEZ HERNÁNDEZ,Juan Carlos, BAEZA ROMERO,Esteban, GÁZQUEZ GARRIDO,Juan Carlos, PLAZA LEIVA,Victoria.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
Fragmento de la descripción:
SISTEMA DE GUIADO PARA MOVIMIENTO AUTÓNOMO DE VEHÍCULOS EN ENTORNOS ESTRUCTURADOS
Sistema de guiado para movimiento autónomo de vehículos en entornos estructurados.
Sector de la técnica 1O La presente invención se incluye dentro del sector de la industria auxiliar de agricultura en general, y más concretamente en el sector de la industria dedicado a la fabricación de máquinas y equipos para la realización de operaciones agrícolas.
Estado de la técnica
Los sistemas de navegación usados actualmente para vehículos autónomos en entornos estructurados (por ejemplo un invernadero) son complejos y caros. Los más ampliamente usados se basan en técnicas de localización absoluta con sistemas basados en sistemas de posicionamiento global GPS (Global Positioning System) o mediante la utilización de balizas y guías AGV (Automatic Guided Vehicle) , y en técnicas de localización relativa basadas en odometría. Los primeros presentan el inconveniente de la baja calidad de la señal en entornos cerrados y de un margen de error que los hacen poco eficientes en estos entornos, así como la necesidad de una gran inversión económica en instalación. Los sistemas basados en odometría presentan el problema de los errores acumulados en desplazamientos largos, lo que no los hace adecuados para grandes entornos estructurados, como un invernadero.
La patente E89304450 quot;Control de vehículo automáticoquot; presenta un sistema típico de localización usando balizas. El vehículo incorpora un sistema de láseres para reconocer
marcas o balizas en el entorno. Dichas balizas están representadas por códigos de barras únicos, los cuales se utilizan para estimar la posición relativa del vehículo a través de triangulación (similar a como lo hace el GPS con satélites) . La invención que se propone supone un avance respecto a este sistema, ya que el láser se utiliza para guiar al vehículo por una trayectoria definida y no para posicionarlo.
En la PCT/NL 1998/000450 quot;Sistema y método para el control de vehículosquot;, los autores presentan un sistema de guiado reactivo de un vehículo. La idea básicamente consiste en incluir en el escenario de trabajo del vehículo a automatizar un conjunto de marcadores-dispuestos a intervalos regulares en la superficie o paredes-para marcar la ruta que debería seguir el vehículo. Igual que antes, respecto a esta patente el sistema objeto de la invención se diferencia, porque propone un sistema de guiado basado en láseres sobre un entorno estructurado aunque, efectivamente, la trayectoria puede cambiar dependiendo de los láseres activos. La principal ventaja de este modo de operar es que los emisores láser siempre están colocados en una zona quot;visiblequot; para el vehículo y por lo 45 tanto no existe posibilidad de oclusiones de marcadores como podría ocurrir en el caso de la patente citada. Nótese que este caso es de especial relevancia en entornos tipo invernadero donde el vehículo se encuentra en zonas no visibles para marcadores, debido a la presencia de las plantas, la mayor parte del tiempo.
En la patente E98306075 quot;Método y sistema para describir, generar y comprobar
trayectorias sin cables para automóviles guiados de forma automáticaquot; se presenta un sistema de guiado semi-reactivo en el que inicialmente se especifica la trayectoria de referencia del vehiculo (base de datos de coordenadas X, Y diferenciales) . A medida que el vehiculo se mueve en el entorno y obtiene realimentación de marcadores colocados en dicho entorno corrige de forma reactiva su trayectoria. En la invención que se 1 O propone, no se especifica una trayectoria de referencia a priori, y por lo tanto el sistema de guiado es totalmente reactivo.
Descripción de la invención La idea del sistema que se propone en la presente invención es similar al de usar guías monorraíles o guías magnéticas, con la diferencia de establecer la ruta mediante un emisor láser situado en el centro longitudinal del camino a recorrer (Figura 2) . En este caso, el vehículo debería ir equipado con un conjunto de cámaras y fotodetectores que permitan detectar la ruta marcada por la red de emisores láser. Estas cámaras estarán colocadas en la parte frontal y en los laterales del vehículo. Esta técnica ofrece una precisión aceptable en entornos con un elevado número de obstáculos, y el coste de implementación no es tan elevado como en el caso de guías monorraíles o el uso de balizas.
El sistema de guiado para la realización de trabajos en invernadero que se propone en la presente invención, supone una novedad en el campo del empleo de máquinas autónomas en la realización de operaciones en invernaderos, ya que permite automatizar cualquier tipo de vehículo y a un coste de ejecución reducido (adquisición de cámaras de visión y emisores láseres) . El empleo del sistema de guiado supone evitar la presencia de operarios en el invernadero para realizar operaciones peligrosas (tareas de pulverización) ,
o bien la ayuda en tareas de recolección y transporte.
El sistema que se pretende patentar está formado de un sistema de visión compuesto por 35 tres cámaras: una frontal y dos laterales, un conjunto de fotodetectores en la parte frontal y lateral del vehículo y un sónar frontal.
La cámara frontal recoge las imágenes de una pantalla sobre la que incide el puntero láser. Mediante un algoritmo de visión artificial se determinará la posición de punto láser 40 respecto al centro de la pantalla. De esta forma, se modificará la orientación del robot de acuerdo a la desviación estimada respecto al centro de la pantalla.
Las dos cámaras de visión situadas en ambos laterales, en combinación con fotodetectores, determinan los giros que debe experimentar el vehículo para seguir el 45 camino adecuado, mediante la detección de un haz láser proveniente del pasillo lateral.Durante la circulación por el pasillo, las cámaras laterales se mantienen inactivas, siendo la cámara frontal la que se encarga de dirigir la trayectoria del vehículo. Las imágenes captadas por las cámaras laterales se utilizan para detectar el láser que indica el cambio de trayectoria a seguir cuando la distancia detectada por el sónar frontal del vehículo es menor a un umbral que indica el final del pasillo.
El algoritmo de visión artificial se basa, primero, en realizar un proceso de corrección de imagen (realzado) , posteriormente, se realizará un proceso de segmentación para diferenciar las partes que componen la imagen. De esta forma podrá detectar el punto 1 O correspondiente al lugar donde ha incidido el rayo láser. A continuación, se calcula la desviación de dicho punto (distancia euclídea) con respecto al punto central de la imagen (centro del pasillo) . Finalmente, utilizando los parámetros de calibración de la cámara, esta desviación se pasará de unidades de imagen (píxeles) a unidades métricas, estimando por tanto la desviación con respecto al centro del pasillo del vehículo. Esta medida se utilizará por controladores de bajo nivel que generan las señales de control apropiadas para mover las ruedas del vehículo.
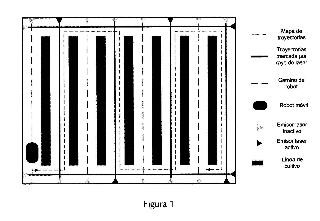
Para poder marcar la ruta que debe seguir el vehículo en el interior del invernadero se ha establecido una malla de emisores láser entre todos los pasillos del invernadero (ver
Figura 1 ) . Dicha malla de emisores se encuentra conectada a un bus de campo conectado a su vez de forma remota a un computador. La forma de controlador el estado de los emisores es la siguiente.
Primero, el usuario establece desde el ordenador la ruta que debe seguir el robot.
Posteriormente, se encienden los primeros láseres para marcar la ruta inicial del robot. A medida que el robot se mueve por el invernadero indica al ordenador remoto los pasillos por los que se ha movido, en este momento el ordenador remoto apaga los láseres de los pasillos pasados y enciende los nuevos láseres. De esta forma progresiva, se establece la ruta de referencia a seguir minimizando el consumo de energía por parte de los emisores láseres.
Breve descripción de las figuras
Para la mejor comprensión de cuanto queda descrito en la presente memoria, se acompañan unos dibujos en los que, tan sólo a título de ejemplo, se incluyen las figuras 1 a 4.
Figura 1: Muestra la disposición de los emisores láser en el invernadero, y se puede observar un ejemplo de trayectoria descrita donde se muestran qué láser se encuentra activo en cada momento con el fin de definir la trayectoria a seguir.
Figura 2: Muestra el proceso de detección del láser por parte del vehículo y cómo realiza el giro para continuar en la trayectoria deseada.
45 Figura 3: Muestra...
Reivindicaciones:
1. Sistema de guiado para movimiento autónomo de vehículos en entornos estructurados que comprende:
a. Un sistema de emisores láser distribuidos por el escenario de trabajo y que determinan la trayectoria a seguir por el vehículo.
O b. Un sistema de detección de señal láser formado por el uso de cámaras y fotodetectores. c. Un cabezal de soporte para el sistema de detección de señal.
2. Sistema de guiado mediante cámara y láser para el movimiento autónomo de vehículos en entornos estructurados, según reivindicación 1 caracterizado porque el cabezal de soporte permite el alojamiento de las cámaras frontal y laterales, así como, la pantalla de detección y el sónar.
3. Sistema de guiado mediante cámara y láser para el movimiento autónomo de vehículos en entornos estructurados, según reivindicaciones 1 y 2 caracterizado por disponer de un sistema configurable de encendido/apagado de los emisores láser que definen la trayectoria a seguir.
4. Sistema de guiado mediante cámara y láser para el movimiento autónomo de vehículos en entornos estructurados, según reivindicaciones 1 a 3 caracterizado porque el sistema de encendido apagado puede controlarse a distancia mediante radio, wifi o similar.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
DISPOSICIÓN DE MANDO, del 30 de Junio de 2020, de SEAT, S.A.: Una disposición de mando de un vehículo autónomo que modifica o ajusta una funcionalidad de conducción de un modo de conducción autónomo del […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, del 17 de Junio de 2020, de THALES: Un procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, el procedimiento comprende las siguientes etapas: - a) el suministro […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
UNIDAD CENTRAL DE VEHÍCULO, del 2 de Junio de 2020, de SEAT, S.A.: Una unidad central de un vehículo comprende un procesador y un cámara de adquisición de imágenes , donde las imágenes adquiridas […]
Método para controlar el tiempo de llegada de una aeronave, del 27 de Mayo de 2020, de THE BOEING COMPANY: Un método para controlar la llegada de una aeronave a un punto de referencia objetivo, comprendiendo (a) definir un tiempo requerido de llegada (RTA) en ese punto de referencia […]