DISPOSITIVO Y MÉTODO PARA LA PREDICCIÓN "ON-LINE" DEL CICLO DE CONDUCCIÓN EN UN VEHÍCULO AUTOMÓVIL.
Dispositivo y método para la predicción "on-line" del ciclo de conducción en un vehículo automóvil.
El método comprende:
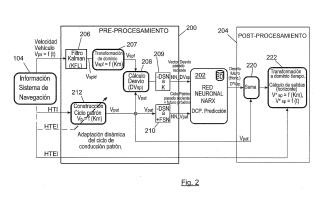
- una etapa de pre-procesamiento de datos (200):
- recibir la velocidad del vehículo (Vsp);
- recibir información de tráfico (HTI) del trayecto previsto en un horizonte de predicción (H);
- obtener (212) un ciclo de conducción de referencia (V{pat});
- calcular (208) el desvío (DVsp) de la velocidad (Vsp) con respecto al ciclo de conducción de referencia (Vpat);
- una etapa de procesamiento de datos mediante red neuronal (202) para obtener de manera recursiva los desvíos previstos (D*Vsp) para el horizonte de predicción (H);
- una etapa de post-procesamiento de datos (204) que comprende obtener, a partir de los desvíos previstos (D*Vsp) y el ciclo conducción de referencia (Vpat) para el horizonte de predicción (H), la velocidad estimada (V*sp) para dicho horizonte de predicción (H).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132144.
Solicitante: SEAT, S.A..
Nacionalidad solicitante: España.
Inventor/es: VALERA GARCÍA,Juan José, CAUS ROQUETA,Jordi, LUX,Gerhard.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W40/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular.
Fragmento de la descripción:
Dispositivo y método para la predicción ‘on-line’ del ciclo de conducción en un vehículo automóvil
Campo de la invención La presente invención se engloba dentro del campo de la automoción, y más concretamente dentro de los dispositivos y métodos de predicción ‘on-line’ (mientras el vehículo está en circulación) del ciclo de 5 conducción de un vehículo híbrido sobre un horizonte de predicción preseleccionado. El objetivo de la invención es suministrar la predicción realizada al subsistema de gestión energética del vehículo híbrido para que éste adapte su estrategia energética en función de dicha predicción, y de esta forma pueda reducir el consumo del vehículo así como optimizar los diferentes flujos energéticos que se dan cita en un vehículo híbrido de cara a aumentar su eficiencia energética, autonomía, y disminuir las emisiones de CO2. 10
Antecedentes de la invención Es bien conocido el hecho de que si el ciclo de conducción (velocidad vehículo = f (tiempo) ) y el ciclo de pendientes o gradientes del terreno (gradiente = f (tiempo) ) se conociera de antemano, sería posible calcular una estrategia energética óptima para el sistema de propulsión de un vehículo híbrido-eléctrico que minimice una función de coste compuesta por términos relacionados con el consumo, emisiones, y/o 15 eficiencia energética, entre otros, del vehículo.
Para alcanzar el óptimo global existen tres inconvenientes o barreras que superar:
1) El ciclo de conducción a realizar por el conductor no se conoce a priori. Incluso aunque se conociera el destino final y trayecto a realizar, el ciclo de conducción depende del estilo de conducción que esté llevando el conductor y de posibles perturbaciones relacionadas con el entorno 20 de conducción tales como congestión de tráfico, condiciones meteorológicas, limitaciones de velocidad por obras, etc.
2) Aunque el ciclo de conducción se conociera de antemano, es necesario tener bien modelado el comportamiento del vehículo de cara a poder construir la función de coste que resulta al plantear el problema de optimización. 25
3) Una vez planteado el problema de optimización es necesario resolverlo para calcular el óptimo global. Destacar en este sentido de que se trata de la resolución de un problema de optimización no-lineal, no-convexo y no-cuadrático, por lo que: (i) no existe solución explícita o analítica del mismo, y (ii) existen técnicas para encontrar el óptimo global tales como la Programación Dinámica (DP) pero se trata de técnicas computacionalmente intratables en sistemas de control ‘on-line’ en tiempo real. 30 De esta forma, se deben realizar ciertas aproximaciones al problema para su resolución con un coste computacional adecuado. Así, la solución se acercará al óptimo global pero éste no se podrá alcanzar (estrategias subóptimas) .
La presente invención se centra en el desarrollo de un sistema o dispositivo que contribuya a resolver el primer inconveniente o barrera relacionado con el conocimiento a priori del ciclo de conducción 35 que realizará el vehículo. De esta forma, este sistema o dispositivo obtiene la predicción ‘on-line’ del ciclo de conducción futuro (velocidad* = f* (tiempo) ) y el ciclo de pendientes o gradientes del terreno (gradiente* = f* (tiempo) ) sobre un horizonte de predicción preseleccionado, enviando esta predicción al sistema de gestión energética del vehículo híbrido-eléctrico. Por tanto, el sistema de gestión energética del vehículo podrá utilizar esta predicción en el planteamiento del problema de optimización energético y la resolución o búsqueda de 40 una solución (gestión energética / reparto de potencia-energía en el sistema de propulsión) óptima y cercana a la solución óptima global.
El modelo de un conductor se refiere a la representación mediante formulaciones matemáticas o algoritmos inteligentes del comportamiento del conductor de un vehículo, es decir, de las tareas del conductor, para analizar o inferir qué acciones toma éste con dicho vehículo. 45
En la referencia bibliográfica [1] (Boyraz, Sathyanarayana, & Hansen, 2009) se detallan distintos algoritmos o técnicas de modelado de conductor. Los modelos eran inicialmente lineales, siendo reemplazados gradualmente por modelos no lineales, probabilísticos y con técnicas inteligentes como lógica borrosa y redes neuronales, según se detalla en la referencia bibliográfica [2] (Panou, Bekiaris, & Papakostopoulos, 2007) . Sin embargo, las últimas tendencias del modelado del conductor apuntan hacia una 50 combinación de algunas o todas las técnicas anteriormente mencionadas, denominando a este grupo de modelos híbridos. En esta clasificación habría que añadir autómatas tipo Mealy empleados en [3] (Kiencke & Nielsen, “Road and Driver Models”, 2005) para la lógica de control de las maniobras del vehículo.
Una aproximación más amplia relaciona el modelo del conductor junto con el modelo puramente dinámico del coche, así como con el entorno del conductor y su vehículo, es decir, la ciudad y los demás conductores. De esta forma, podemos definir distintos tipos de modelos de conductor atendiendo a la realidad que mejor quieren representar.
Existen muchos campos de aplicación de dichos modelos y la tendencia en las últimas décadas es 5 que tengan cada vez mayor repercusión, [2] (Panou, Bekiaris, & Papakostopoulos, 2007) . Si agrupamos las diferentes aplicaciones bajo paraguas comunes, tenemos principalmente tres corrientes, a las cuales añadiremos una cuarta según los últimos trabajos realizados en este campo.
1. El comportamiento del conductor atendiendo a los procesos cognitivos y fisiológicos a. Análisis del comportamiento del conductor 10
b. Inferencia del comportamiento del conductor
c. Entrenamiento y asesoría de conductores 2. El control del vehículo a. Simulación y el prototipado b. Dinámica vehicular 15
c. Sistemas de control para ayuda a la conducción y seguridad (ABS, ESC, control de tracción…)
d. La conducción autónoma 3. Simulación del tráfico a. Microscópico b. Macroscópico 20
4. Estrategias energéticas La primera de ellas se centra en las características del comportamiento humano del conductor, es decir, el análisis de dicho comportamiento, su interpretación de gestos y emociones por una parte y la inferencia de ese comportamiento en el control del vehículo, maniobras y estrategia de conducción. Dentro de este paraguas, resulta clarividente incluir el modelo jerárquico de control de Michon (1985) . La primera 25 distinción que hace es la de diferenciar entre modelo externos de tipo entrada-salida y los de tipo interno, de estados. La otra distinción se refiere a la de modelos funcionales o modelos de taxonomía. Michon afirma que los modelos son generalmente “bottom-up” (internos) y que los “top-down” son generalmente inespecíficos y demasiado simplificados. Su modelo tipo proceso cognitivo, el Modelo de Control Jerárquico (“Hierarchical Control Model”) , divide la tarea de conducción en tres niveles acoplados y jerárquicos: 30
1. El nivel estratégico: planificación del trayecto, elección de ruta 2. El de maniobrabilidad: relaciona al conductor con los demás vehículos 3. El nivel de control: se refiere al nivel del control del vehículo Un cuarto nivel sería el nivel de puramente de comportamiento, [2] (Panou, Bekiaris, & Papakostopoulos, 2007) . Otra oportuna clasificación del comportamiento del conductor es la que distingue 35 entre el seguimiento de una trayectoria deseada y la de la estabilidad ante perturbaciones.
El segundo grupo de aplicaciones se centra en la tarea puramente de control del vehículo. Este grupo tiene una correlación directa con el nivel de control de Michon. El control de un vehículo se divide en dos, control longitudinal (acelerador y freno) y control lateral (volante) . Se considera a Tustin (1947) como el primero en publicar un modelo de conductor matemáticamente. A él se unieron después realizando 40 aportaciones de interés McRuer & Krendel, Ragazzini y Jackson ([4] Abe, 2009) .
Aunque en un principio el control longitudinal y el lateral se controlaban de forma independiente, las últimas aportaciones relacionan ambos controles, ya que una influencia en la otra ([1] Boyraz, Sathyanarayana, & Hansen, 2009) . Estos controles se estudian en conjunto con las diferentes maniobras del vehículo. Las tres principales son mantenimiento en el carril, cambio de carril y control de velocidad según las 45 señales y seguimiento a un vehículo. Para una exhaustivo resumen crítico de estas técnicas referirse...
Reivindicaciones:
1. Método para la predicción ‘on-line’ del ciclo de conducción en un vehículo automóvil, caracterizado por que comprende:
- una etapa de pre-procesamiento de datos (200) , que a su vez comprende:
• recibir la velocidad del vehículo (Vsp) ; 5
• recibir información de tráfico (HTI) correspondiente al trayecto previsto para el vehículo dentro de al menos un horizonte de predicción (H) considerado;
• obtener (212) , a partir de la información de tráfico (HTI) recibida, un ciclo de conducción de referencia (Vpat) correspondiente al trayecto previsto dentro de al menos dicho horizonte de predicción (H) ; 10
• calcular (208) el desvío (DVsp) de la velocidad del vehículo (Vsp) con respecto al ciclo de conducción de referencia (Vpat) ;
- una etapa de procesamiento de datos mediante una red neuronal (202) , que comprende obtener de manera recursiva los desvíos previstos (D*Vsp) para el horizonte de predicción (H) , utilizando para ello como entradas de la red neuronal (202) los desvíos de velocidad (NN_DVsp) previamente calculados y 15 correspondientes al pasado reciente en un número de muestras de retardo (DSN) así como información relativa al ciclo de conducción de referencia (NN_Vpat) que contiene información perteneciente tanto al pasado reciente en un número de muestras de retardo (DSN) como al futuro próximo en un número de muestras de futuro próximo (FSN) ;
- una etapa de post-procesamiento de datos (204) que comprende obtener, a partir de los desvíos 20 previstos (D*Vsp) y el ciclo de conducción de referencia (Vpat) para el horizonte de predicción (H) , la velocidad estimada (V*sp) para dicho horizonte de predicción (H) .
2. Método según la reivindicación 1, caracterizado por que la etapa de pre-procesamiento de datos (200) comprende recibir información de eventos de tráfico (HTEI) correspondiente al trayecto previsto para el vehículo dentro de al menos el horizonte de predicción (H) , y donde para la obtención del ciclo de 25 conducción de referencia (Vpat) se emplea también dicha información de eventos de tráfico (HTEI) recibida.
3. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que la red neuronal (202) es una red neuronal dinámica recurrente de topología NARX, previamente entrenada.
4. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que en la etapa de pre-procesamiento de datos (200) la velocidad del vehículo (Vsp) se muestrea según un determinado 30 tiempo de muestreo (ST) ; y donde la obtención (212) del ciclo patrón de referencia (Vpat) y el cálculo del desvío (DVsp) de la velocidad del vehículo (Vsp) con respecto al ciclo de conducción de referencia (Vpat) se realiza para cada tiempo de muestreo (ST) .
5. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que la información relativa al ciclo de conducción de referencia (Vpat) comprende una velocidad patrón adelantada 35 un número de muestras de futuro próximo (FSN) , el cual es equivalente a la distancia de visión del conductor y la anticipación del conductor ante próximos cambios en la situación del tráfico.
6. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que la información de tráfico (HTI) incluye adicionalmente al menos una de las siguientes informaciones:
- los límites de velocidad; 40
- información del tipo de vía;
- las pendientes de la carretera;
- las señales de tráfico del trayecto previsto.
7. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que la información de eventos de tráfico (HTEI) incluye información relativa a al menos uno de los siguientes: 45
- estado del tráfico;
- límites de velocidad por motivo de obras en la carretera;
- condiciones de visibilidad;
- condiciones del asfalto.
8. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que la información de tráfico (HTI) y la información de eventos de tráfico (HTEI) son recibidas dentro del intervalo [p, p+H] siendo p la posición actual del vehículo y H el horizonte de predicción seleccionado. 5
9. Método según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende obtener el estilo de conducción (DS) del conductor del vehículo según unos cálculos que dependen de un parámetro relativo al modo de cálculo del estilo de conducción (DSCM) seleccionado, donde los modos de cálculo están basados en al menos uno de los siguientes:
- cálculo basado en transformada de Fourier de un vector formado por los valores de velocidad del 10 vehículo correspondientes al pasado reciente;
- cálculo basado en la variación media de la velocidad sobre un periodo de tiempo;
- cálculo basado en los tiempos de reacción del conductor.
10. Dispositivo para la predicción ‘on-line’ del ciclo de conducción en un vehículo automóvil, caracterizado por que comprende: 15
- medios de comunicación (600) configurados para recibir la velocidad del vehículo (Vsp) y para recibir de un sistema de navegación (104) información de tráfico (HTI) correspondiente al trayecto previsto para el vehículo dentro de al menos un horizonte de predicción (H) considerado;
- medios de procesamiento de datos (604) configurados para:
• obtener (212) , a partir de la información de tráfico (HTI) recibida por los medios de 20 comunicación, un ciclo de conducción de referencia (Vpat) correspondiente al trayecto previsto dentro de al menos dicho horizonte de predicción (H) ;
• calcular (208) el desvío (DVsp) de la velocidad del vehículo (Vsp) con respecto al ciclo de conducción de referencia (Vpat) ;
• obtener de manera recursiva, mediante una red neuronal (202) , los desvíos previstos 25 (D*Vsp) para el horizonte de predicción (H) , utilizando para ello como entradas de la red neuronal (202) los desvíos de velocidad (NN_DVsp) previamente calculados y correspondientes al pasado reciente en un número de muestras de retardo (DSN) así como información relativa al ciclo de conducción de referencia (NN_Vpat) que contiene información perteneciente tanto al pasado reciente en un número de muestras de retardo (DSN) como al futuro próximo en un número de muestras de 30 futuro próximo (FSN) ;
• obtener, a partir de los desvíos previstos (D*Vsp) y el ciclo de conducción de referencia (Vpat) para el horizonte de predicción (H) , la velocidad estimada (V*sp) para dicho horizonte de predicción (H) .
11. Dispositivo según la reivindicación 10, caracterizado por que los medios de comunicación 35 (600) están adicionalmente configurados para recibir, del sistema de navegación (104) , información de eventos de tráfico (HTEI) correspondiente al trayecto previsto para el vehículo dentro de al menos el horizonte de predicción (H) , y donde los medios de procesamiento de datos (604) están configurados para obtener el ciclo de conducción de referencia (Vpat) empleando también dicha información de eventos de tráfico (HTEI) recibida por los medios de comunicación. 40
12. Dispositivo según cualquiera de las reivindicaciones 10 a 11, caracterizado por que la red neuronal (202) es una red neuronal dinámica recurrente de topología NARX, previamente entrenada.
13. Dispositivo según cualquiera de las reivindicaciones 10 a 12, caracterizado por que los medios de procesamiento de datos (604) están configurados para muestrear la velocidad del vehículo (Vsp) según un determinado tiempo de muestreo (ST) y para obtener (212) el ciclo patrón de referencia (Vpat) y el cálculo del 45 desvío (DVsp) de la velocidad del vehículo (Vsp) con respecto al ciclo de conducción de referencia (Vpat) para cada tiempo de muestreo (ST) .
14. Dispositivo según cualquiera de las reivindicaciones 10 a 13, caracterizado por que la información relativa al ciclo de conducción de referencia (Vpat) comprende una velocidad patrón adelantada un número de muestras de futuro próximo (FSN) , el cual es equivalente a la distancia de visión del conductor 50
y la anticipación del conductor ante próximos cambios en la situación del tráfico.
15. Dispositivo según cualquiera de las reivindicaciones 10 a 14, caracterizado por que los medios de procesamiento de datos están configurados para realizar el cálculo de predicción mientras el vehículo está en circulación y cada vez que el vehículo avanza una distancia seleccionada mediante un parámetro (H_Resol) 5
Patentes similares o relacionadas:
Procedimiento para la emisión de avisos de peligro de un sistema de asistencia al conductor y sistema de asistencia al conductor correspondiente, del 25 de Octubre de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para la emisión de avisos de peligro de un sistema de asistencia al conductor en un vehículo , en el que - se registran […]
 Calculador de velocidad de vehículo, del 6 de Agosto de 2014, de HONDA MOTOR CO., LTD.: Un calculador de velocidad del vehículo que incluye:
unos medios de captura de imagen fijados a un vehículo para capturar imágenes […]
Calculador de velocidad de vehículo, del 6 de Agosto de 2014, de HONDA MOTOR CO., LTD.: Un calculador de velocidad del vehículo que incluye:
unos medios de captura de imagen fijados a un vehículo para capturar imágenes […]
 MÉTODO PARA LA DETERMINACIÓN DEL RANGO DE EFICIENCIA EN LA CONDUCCIÓN DE UN VEHÍCULO AUTOMÓVIL, del 12 de Julio de 2012, de CRAMBO, S.A: Método para la determinación del rango de eficiencia en la conducción de un vehículo automóvil.
Método para la determinación de un rango de eficiencia en cuanto al consumo […]
MÉTODO PARA LA DETERMINACIÓN DEL RANGO DE EFICIENCIA EN LA CONDUCCIÓN DE UN VEHÍCULO AUTOMÓVIL, del 12 de Julio de 2012, de CRAMBO, S.A: Método para la determinación del rango de eficiencia en la conducción de un vehículo automóvil.
Método para la determinación de un rango de eficiencia en cuanto al consumo […]
 AMPLIFICADOR DE SEÑALES DE ACELERACION - PILOTO AUTOMATICO PARA COCHES DE NUEVA TECNOLOGIA, del 13 de Septiembre de 2010, de PANAGOPOULOS, DIMITRIOS
BOULEKOS, STAMATIOS: Amplificador de señales de aceleración para coches de nueva tecnología, que interfiere entre el potenciómetro del pedal de aceleración y la unidad de control electrónico […]
AMPLIFICADOR DE SEÑALES DE ACELERACION - PILOTO AUTOMATICO PARA COCHES DE NUEVA TECNOLOGIA, del 13 de Septiembre de 2010, de PANAGOPOULOS, DIMITRIOS
BOULEKOS, STAMATIOS: Amplificador de señales de aceleración para coches de nueva tecnología, que interfiere entre el potenciómetro del pedal de aceleración y la unidad de control electrónico […]