DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO.
Sistema para medir los parámetros de posición característicos de un vehículo (10),
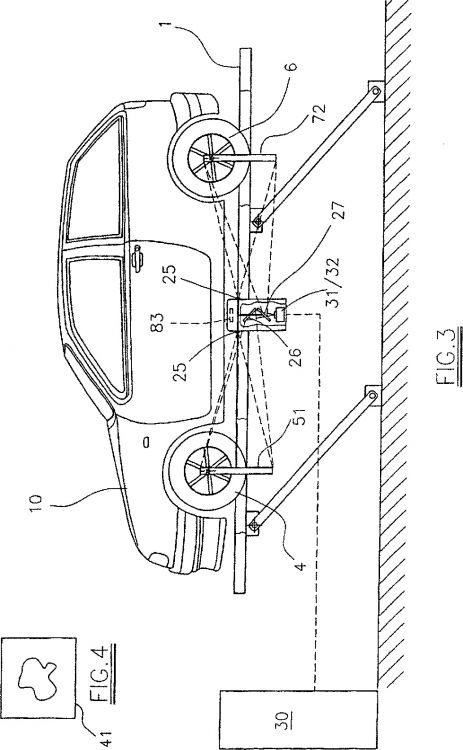
que comprende por lo menos una cámara de vídeo (21, 22, 31, 32) dispuesta para controlar por lo menos una imagen de un blanco (41, 51, 62, 72) rígido con por lo menos una rueda del vehículo, y unos medios para tratar la imagen obtenida del blanco para determinar la orientación del blanco con respecto a un sistema de referencia, que comprende:
- una zona de medición;
- una primera unidad de medición (2) fijada a uno de los lados de dicha zona y que comprende por lo menos una primera cámara de vídeo (21, 22) orientada hacia cualquier blanco (41, 62) fijado en este lado con cualquier orientación con respecto a una rueda dispuesta en el mismo lado;
- una segunda unidad de medición (3) fijada al otro lado de dicha zona y que comprende por lo menos una segunda cámara de vídeo (31, 32) orientada hacia cualquier blanco (51, 72) fijado en este lado con cualquier orientación con respecto a una rueda dispuesta en el mismo lado;
- una tercera cámara de vídeo (23) asociada con la primera unidad de medición (2) fijada a uno de los lados de la zona y orientada hacia la otra unidad de medición (3) fijada en el otro lado de la zona;
- cualquier otro blanco (83) rígido con la segunda unidad (3) fijada al otro lado de la zona y dispuesta dentro del campo de visión de la tercera cámara de vídeo (23);
caracterizado porque el sistema presenta unos carriles laterales (12, 13) que permiten que cada unidad de medición (2, 3) experimente unos movimientos limitados pero mensurables de tal manera que dichas primera y segunda cámara (21, 22, 31, 32) reciba por lo menos dos imágenes del mismo blanco (41, 51, 62, 72), desde dos posiciones distintas, y porque comprende
- unos medios de procesador (30) para las imágenes obtenidas por la primera y segunda cámara de vídeo (21, 22, 31, 32) para determinar la posición espacial de los blancos (41, 51, 62, 72) con respecto al respectivo sistema de referencia de cada unidad de medición; y
- unos medios de procesador (30) para las imágenes de dicho blanco (83) obtenidas por dicha tercera cámara de vídeo (23) para determinar la posición espacial de la primera unidad de medición con respecto a la segunda unidad de medición con el fin de atribuir a todas las cámaras el mismo sistema de referencia único; y
- unos medios de visualizador que exponen los datos dispuestos por dichos medios de procesador (30)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E02425053.
Solicitante: CORGHI S.P.A..
Nacionalidad solicitante: Italia.
Dirección: 9, STRADA STATALE 468,I-42015 CORREGGIO (REGGIO EMIL.
Inventor/es: CORGHI, REMO.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Febrero de 2002.
Fecha Concesión Europea: 11 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- G01B11/275B
Clasificación PCT:
- G01B11/275 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para ensayar la alineación de ruedas.
Clasificación antigua:
- G01B11/275 G01B 11/00 […] › para ensayar la alineación de ruedas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo para medir los parámetros de posición característicos de un vehículo.
La presente invención se refiere a un dispositivo para medir los parámetros de posición característicos de un vehículo.
Son conocidos unos dispositivos de tipo mecánico y de tipo óptico para la medición de dichos parámetros.
Son conocidos unos dispositivos ópticos que utilizan cámaras de vídeo dispuestas en una posición fija con respecto al lugar de medición en el que se dispone el vehículo que debe comprobarse.
Dichas cámaras de vídeo controlan una serie de blancos o localizadores de dimensiones conocidas, cada uno de los mismos rígido con una de las ruedas, y alimentan los datos a un procesador que trata los datos obtenidos por medio de fórmulas trigonométricas conocidas, para proporcionar en una pantalla, y posiblemente por medio de una impresora, los parámetros de posición característicos del vehículo, particularmente:
- - semiconvergencia delantera izquierda y derecha
- - convergencia total delantera
- - semiconvergencia trasera izquierda y derecha
- - convergencia total trasera
- - inclinación de las ruedas delanteras izquierda y derecha
- - inclinación de las ruedas traseras izquierda y derecha
- - incidencia izquierda y derecha
- - perno de dirección izquierdo y derecho
- - impedimento delantero y trasero
- - ángulo de empuje
- - diferencia de ancho de vía
El texto se comprenderá mejor a partir de las siguientes definiciones de los ángulos característicos:
- - semiconvergencia: el ángulo formado entre el plano perpendicular al eje de cada rueda y el eje de simetría longitudinal del vehículo.
- - convergencia total: el ángulo resultante de la suma de ángulos de semiconvergencia de las ruedas que pertenecen a un y mismo eje;
- - inclinación de la rueda: el ángulo formado entre el plano perpendicular al eje de cada rueda y el plano vertical;
- - incidencia: el ángulo entre la proyección del eje de dirección sobre el plano longitudinal del vehículo y la vertical;
- - perno de dirección: el ángulo formado entre la proyección del eje de dirección sobre el plano transversal del vehículo y la vertical;
- - impedimento; la desalineación entre las ruedas de un y mismo eje y el eje de simetría del vehículo;
- - eje de empuje: el eje entre la bisectriz del ángulo de convergencia trasera total y el eje de simetría del vehículo;
- - diferencia de ancho de vía: el ángulo entre la línea que une las ruedas dispuestas en un y mismo lado, pero que pertenecen a dos ejes distintos, y el eje de simetría del vehículo.
Los blancos utilizados por dicho sistema comprenden, en un plano, diseños geométricos formados por ejemplo a partir de sucesiones de puntos, tales como cuadrículas de puntos, en las que los puntos pueden ser opacos o luminosos.
Las superficies de soporte de diseño y los propios diseños son conocidos y de dimensiones conocidas, y están montados rígidos con las ruedas de los vehículos que deben examinarse. Una comparación entre las dimensiones geométricas conocidas y las imágenes recibidas por las cámaras de vídeo forma la base para el tratamiento que da como resultado el cálculo de la posición espacial del blanco/la rueda.
También es conocido un sistema, ilustrado en la publicación alemana DE 2948573.
Comprende un par de cámaras de vídeo en cada lado del vehículo, pudiéndose hacer girar cada par con el fin de ver las ruedas delanteras y traseras del vehículo de manera alternativa.
Dichas cámaras de vídeo leen un blanco rígido con la rueda, siendo éste el borde de la llanta.
Mediante la comparación de las imágenes, sustancialmente en forma de elipses que presentan características geométricas proporcionales a la inclinación de la rueda, con referencia al círculo que consiste en el borde de la llanta, o interpolando las imágenes, pueden determinarse los parámetros de posición característicos.
En los documentos WO 94/05969 y WO 97/14016 se ilustra otro sistema conocido, que comprende una zona de medición fija que presenta una barra rígida frontal en la que están dispuestas dos cámaras de vídeo fijas separadas en una distancia predeterminada y están apuntadas a unos blancos rígidos con las ruedas de la derecha y de la izquierda del vehículo.
Mediante la comparación de las imágenes obtenidas por las cámaras de vídeo con las imágenes de ejemplo de blanco, pueden calcularse los parámetros de posición característicos utilizando cálculos trigonométricos.
El documento EP 1 003 013 da a conocer un sistema de medición en el que por lo menos están implicadas cuatro cámaras, utilizándose una primera cámara como cámara de calibración para el sistema. El sistema expone en primer lugar un procedimiento para determinar el eje óptico de una cámara. En particular, la primera cámara lee un blanco que presenta una forma predeterminada en dos posiciones distintas, con el fin de determinar su propia posición. Dicha operación se realiza apuntando la cámara de calibración hacia un espejo que presenta unos elementos de referencia adecuados. La primera cámara puede leer, de este modo, en dicho espejo la imagen reflejada de un blanco de referencia fijado en la propia primera cámara. Según dicha observación, el sistema puede deducir con unos cálculos adecuados la posición de la primera cámara.
La posición de las otras cámaras se determina entonces en una segunda etapa. En particular, una segunda cámara determina su posición con respecto a la primera cámara observando un blanco de referencia en la primera cámara. De manera similar, una tercera cámara determina su posición con respecto a la primera cámara. Por último, una cuarta cámara determina su posición con respecto a la primera cámara.
En este sistema, todas las cámaras se disponen de una manera fija y deben utilizarse blancos de dimensiones y forma conocidos.
El documento WO 00/16121 da a conocer un procedimiento para determinar la posición de una cámara de vídeo en un estudio de TV, por ejemplo, para superponer correctamente una imagen obtenida por la cámara de vídeo en el estudio (por ejemplo, un coche) sobre una segunda imagen obtenida previamente (por ejemplo, una casa). El sistema proporciona un marcador de forma compleja que indica diversas direcciones en el espacio, concretamente las coordenadas x, y, z además de, la inclinación y la función, que deben disponerse en la cámara de vídeo y deben ser obtenidas por otro conjunto de cámaras de vídeo. Una unidad de proceso central calcula entonces la posición de la primera cámara de vídeo.
El documento FR 2 764 992 da a conocer un sistema para determinar la posición espacial de un objeto tridimensional. El sistema comprende por lo menos tres módulos de medición distintos dispuestos en tres puntos distintos de un triángulo. Cada módulo de medición presenta un dispositivo emisor de rayos y un espejo u otro detector de luz adecuado. Los módulos de medición se montan en un conjunto que puede girar alrededor de un eje vertical en un ángulo a y alrededor de un eje horizontal alrededor de un ángulo ß. También se mide la distancia de referencia D que separa dos módulos de medición. Cada módulo de medición puede apuntarse entonces hacia otro módulo hasta que los rayos emitidos por los emisores de un módulo son captados por el espejo del otro módulo. Los ángulos a y ß se miden en este momento mediante unos codificadores adecuados. Cada par de módulos de medición se dispone de este modo en dicha relación de colimación. Una unidad central memoriza cada par de ángulos a y ß. Por último, la unidad central, comenzando a partir de tres pares de ángulos de medición a y ß y la distancia D calcula la posición del objeto.
También es conocido un sistema, descrito en el documento WO 01/71280, que utiliza dos cámaras de vídeo de alineación que obtienen imágenes...
Reivindicaciones:
1. Sistema para medir los parámetros de posición característicos de un vehículo (10), que comprende por lo menos una cámara de vídeo (21, 22, 31, 32) dispuesta para controlar por lo menos una imagen de un blanco (41, 51, 62, 72) rígido con por lo menos una rueda del vehículo, y unos medios para tratar la imagen obtenida del blanco para determinar la orientación del blanco con respecto a un sistema de referencia, que comprende:
- - una zona de medición;
- - una primera unidad de medición (2) fijada a uno de los lados de dicha zona y que comprende por lo menos una primera cámara de vídeo (21, 22) orientada hacia cualquier blanco (41, 62) fijado en este lado con cualquier orientación con respecto a una rueda dispuesta en el mismo lado;
- - una segunda unidad de medición (3) fijada al otro lado de dicha zona y que comprende por lo menos una segunda cámara de vídeo (31, 32) orientada hacia cualquier blanco (51, 72) fijado en este lado con cualquier orientación con respecto a una rueda dispuesta en el mismo lado;
- - una tercera cámara de vídeo (23) asociada con la primera unidad de medición (2) fijada a uno de los lados de la zona y orientada hacia la otra unidad de medición (3) fijada en el otro lado de la zona;
- - cualquier otro blanco (83) rígido con la segunda unidad (3) fijada al otro lado de la zona y dispuesta dentro del campo de visión de la tercera cámara de vídeo (23);
caracterizado porque el sistema presenta unos carriles laterales (12, 13) que permiten que cada unidad de medición (2, 3) experimente unos movimientos limitados pero mensurables de tal manera que dichas primera y segunda cámara (21, 22, 31, 32) reciba por lo menos dos imágenes del mismo blanco (41, 51, 62, 72), desde dos posiciones distintas, y porque comprende
- - unos medios de procesador (30) para las imágenes obtenidas por la primera y segunda cámara de vídeo (21, 22, 31, 32) para determinar la posición espacial de los blancos (41, 51, 62, 72) con respecto al respectivo sistema de referencia de cada unidad de medición; y
- - unos medios de procesador (30) para las imágenes de dicho blanco (83) obtenidas por dicha tercera cámara de vídeo (23) para determinar la posición espacial de la primera unidad de medición con respecto a la segunda unidad de medición con el fin de atribuir a todas las cámaras el mismo sistema de referencia único; y
- - unos medios de visualizador que exponen los datos dispuestos por dichos medios de procesador (30).
2. Sistema según la reivindicación 1, caracterizado porque la zona de medición tiene forma de un elevador de vehículos (1) en el que están fijadas dichas unidades de medición (2, 3).
3. Sistema según la reivindicación 1, caracterizado porque la zona de medición tiene forma de un foso equipado adecuadamente con dicha unidades de medición (2, 3).
4. Sistema según la reivindicación 1, caracterizado porque por lo menos una unidad de medición (2, 3) comprende una cámara de vídeo (21, 31) orientada hacia un blanco (41, 51) fijado a la rueda delantera del vehículo y una cámara de vídeo (23, 32) orientada hacia un blanco (62, 72) fijado a la rueda trasera en el mismo lado.
5. Dispositivo según la reivindicación 1, caracterizado porque por lo menos una unidad de medición (2) comprende una tercera cámara de vídeo (23) orientada hacia el blanco (83) rígido con la unidad dispuesta en el otro lado de la zona, comprendiendo la otra unidad (3) un blanco (83) orientado hacia dicha cámara de vídeo (23).
6. Dispositivo según la reivindicación 1, caracterizado porque comprende unos medios accionados intermitentemente (25) para iluminar por lo menos un blanco.
Patentes similares o relacionadas:
APARATO DE ALINEACIÓN DE RUEDAS EN 3D SIN CONTACTO, SISTEMA Y PROCEDIMIENTO DEL MISMO, del 2 de Noviembre de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Aparato de medición de la alineación para medir la alineación sin contacto de una rueda de vehículo, comprendiendo el aparato: un soporte en el que […]
 PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]
 PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]
PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]
Sistema y método relacionado para determinar la alineación de rueda de vehículo, del 12 de Abril de 2019, de Space S.r.L. Con Unico Socio: Un sistema (1; 1') para determinar la orientación de al menos una primera rueda de un vehículo , incluyendo: - al menos un primer objetivo (5; 5') configurado para […]
Sistema para determinar la orientación de al menos dos ruedas de un vehículo con un dispositivo de detección, y método para calibrar el dispositivo de detección, del 13 de Marzo de 2019, de Space S.r.L. Con Unico Socio: Un sistema para determinar la orientación de al menos una primera rueda y una segunda rueda de un vehículo bajo examen en una zona […]
Un dispositivo y un método para verificar un comportamiento de un vehículo, del 22 de Noviembre de 2017, de NEXION S.p.A: Un dispositivo para verificar un comportamiento de un vehículo , que comprende al menos un instrumento de medición para medir el valor de al menos […]
Dispositivo y procedimiento para determinar y ajustar la geometría de chasis de un vehículo, del 14 de Junio de 2017, de Dürr Assembly Products GmbH: Procedimiento para determinar y ajustar la geometría de chasis de un vehículo, que comprende los siguientes pasos de procedimiento: 1. la aplicación de una balanza […]
Mueble auxiliar para la alineación de la dirección de un vehículo, del 25 de Mayo de 2016, de NOROTO SAU: Mueble auxiliar para la alineación de la dirección de un vehículo, estando el vehículo colocado sobre una plataforma elevadora, comprendiendo el mueble auxiliar un poste […]