CIP-2021 : A47L 9/28 : Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador;
Control de los aspiradores por medios eléctricos.
CIP-2021 › A › A47 › A47L › A47L 9/00 › A47L 9/28[1] › Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
A NECESIDADES CORRIENTES DE LA VIDA.
A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL.
A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08).
A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores.
A47L 9/28 · Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
CIP2021: Invenciones publicadas en esta sección.
Limpieza de pisos autónoma con almohadilla extraíble.
(20/02/2019). Solicitante/s: IROBOT CORPORATION. Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M, FORAN,DANIEL, GRAZIANI,ANDREW.
Un conjunto de almohadillas de limpieza de robots autónomos (120; 800E; 1000; 1200; 300) de diferentes tipos, comprendiendo cada una de las cuales:
un cuerpo de almohadilla que tiene superficies amplias opuestas, que incluyen una superficie de limpieza y una superficie de montaje;
una característica de identificación del tipo de almohadilla indicativa de un tipo de almohadilla de limpieza; y
una placa de montaje (802E; 1006; 1206; 1306) asegurada a través de la superficie de montaje del cuerpo de la almohadilla y que comprende un recorte (803E, 1012, 1212, 1305) que define al menos en parte la característica de identificación del tipo de almohadilla , habilitando la placa de montaje un sensor de almohadilla de un robot , cuando la almohadilla de limpieza se monta en el robot, para detectar la característica de identificación del tipo de almohadilla.
PDF original: ES-2726712_T3.pdf
Ayuda en una limpieza de superficie.
(23/01/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: SERNECKI,MIRON, STRANG,BENJAMIN.
Procedimiento para la ayuda en una limpieza de superficies con un aparato de limpieza (2, 2') por parte de un usuario (B), siendo realizado este procedimiento por uno o varios dispositivos (2, 2', 100), que comprende:
- determinar datos de posición del aparato de limpieza (2, 2') o de una parte (4, 4', 8) del mismo,
- determinar datos en relación con la limpieza basados en los datos de posición determinados,
- facilitar los datos en relación con la limpieza determinados por medio de una unidad de salida para el usuario (B) para la ayuda en la limpieza,
caracterizado por que
la determinación de datos de posición del aparato de limpieza (2, 2') o de una parte (4, 4', 8) del mismo comprende un registro óptico del aparato de limpieza (2, 2') o de una parte (4, 4', 8) del mismo, y
el uno o los varios dispositivos (2, 2', 100) comprenden un medio auxiliar óptico electrónico , especialmente unas gafas inteligentes.
PDF original: ES-2713704_T3.pdf
Aparato de limpieza de suelos en seco y en húmedo, así como procedimiento de funcionamiento de un aparato automóvil de limpieza de suelos.
(19/12/2018). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: MEGGLE,MARTIN, HILLEN,LORENZ, SCHEFFEL,JENNY, HOFFMANN,SABRINA, EIDMOHAMMADI,NAZLI, VON DER HEYDEN,JAN.
Procedimiento de funcionamiento de un aparato automóvil de limpieza de suelos, en el que el aparato de limpieza de suelos recorre en una primera fase de trabajo un primer camino de tratamiento (11, 12, 13, 14, 15, 16, 16', 17) sobre el suelo (1, 2, 3, 4, 5, 6, 6', 7) a limpiar según una estrategia de desplazamiento prefijada o según un algoritmo prefijado en base a una estrategia de desplazamiento calculada por datos registrados con sensores , y realiza entonces una primera fase de limpieza con un primer equipo de limpieza , caracterizado por que en la primera fase de trabajo se registran zonas de las superficies de suelo (1, 2, 3, 4, 5, 6, 6', 7) a limpiar que se limpian en al menos una segunda fase de trabajo con un segundo equipo de limpieza o que se excluyen de la limpieza con el segundo equipo de limpieza.
PDF original: ES-2703910_T3.pdf
Aspirador con medios de detección de la presencia de un succionador.
(22/11/2018). Solicitante/s: SEB S.A.. Inventor/es: MEYRIGNAC,Robert, MARCHAL,ERIC.
Aspirador que incluye una carcasa y un moto-ventilador destinado a crear una depresión en un tubo de aspiración cuyo extremo está equipado con un succionador , incluyendo la carcasa una unidad de mando que puede hacer funcionar el moto-ventilador según al menos dos modos, caracterizado por que el aspirador incluye un medio de detección de la presencia del succionador , y por que la unidad de mando activa un primer modo de funcionamiento cuando se detecta el succionador y un segundo modo de funcionamiento cuando no se detecta el succionador , y por que el medio de detección de la presencia de un succionador incluye un dispositivo inalámbrico para detectar una baliza de identificación situada en el succionador.
PDF original: ES-2690818_T3.pdf
Dispositivo de aspiración, en particular dispositivo de aspiración en húmedo, así como dispositivo para la derivación de carga estática, en particular para uso en dispositivos de aspiración.
(25/04/2018). Solicitante/s: PROAIR GMBH GERATEBAU. Inventor/es: ROTH, PAUL.
Dispositivo de aspiración, en particular dispositivo de aspiración en húmedo, de la clase de protección II, con una conexión para un tubo de aspiración , con un motor de accionamiento y con al menos una pieza eléctricamente no conductora , caracterizado porque la pieza eléctricamente no conductora para la derivación de voltaje estático está unida de manera eléctricamente conductora a través de al menos un elemento de contacto con un dispositivo, que presenta un grupo de condensadores con al menos un condensador , que está conectado a una línea para introducir el voltaje estático y en el caso de superar una determinada cantidad de carga deriva el voltaje a la red de corriente eléctrica.
PDF original: ES-2678948_T3.pdf
Control de velocidad adaptativo de cepillo lateral rotatorio.
(04/04/2018). Solicitante/s: AKTIEBOLAGET ELECTROLUX. Inventor/es: HAEGERMARCK, ANDERS, LINDHÉ,MAGNUS, FORSBERG,PETTER, KLINTEMYR,ANDREAS.
Dispositivo de limpieza robótico , que comprende:
un cuerpo principal ;
un sistema de propulsión (12, 13, 15a, 15b) dispuesto para desplazar el dispositivo de limpieza robótico a través de una superficie a limpiar;
un controlador dispuesto para controlar el sistema de propulsión (12, 13, 15a, 15b) para desplazar el dispositivo de limpieza robótico a través de la superficie a limpiar;
una abertura en un lado inferior del cuerpo principal, a través de la cual se elimina suciedad de la superficie; y por lo menos un cepillo lateral rotatorio dispuesto junto a la abertura ; caracterizado por que
el controlador está dispuesto para registrar la velocidad con la que el dispositivo de limpieza robótico se desplaza a través de la superficie a limpiar, y para controlar además la velocidad de rotación de dicho por lo menos un cepillo lateral rotatorio en base a la velocidad registrada de desplazamiento del dispositivo de limpieza robótico.
PDF original: ES-2675786_T3.pdf
Conjunto aspirador con entrada a través de depósito extraíble.
(28/03/2018). Solicitante/s: SHOP VAC CORPORATION. Inventor/es: NORELL,NEIL N, ROBITAILLE,JAMES M, HUFF,MATTHEW L, WOLFE,JR. MELVIN E.
Un conjunto aspirador que tiene:
un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ;
una manguera de vacío ; y
un depósito que puede moverse entre una posición montada y una posición quitada,
caracterizado
porque el depósito tiene una tapa extraíble y una entrada y una salida en la tapa ,
porque en , la posición montada, la entrada comunica con la manguera y la salida comunica con el conjunto de motor/ventilador ,
porque en , la posición quitada, la entrada está desconectada de la manguera y la salida está desconectada del conjunto de motor/ventilador.
PDF original: ES-2665750_T3.pdf
Vehículo con un sistema de vacío.
(21/03/2018) Un vehículo que tiene:
una cabina ;
una cavidad entre un panel exterior del vehículo y un segmento de pared de cabina generalmente vertical ;
una abertura de liberación de aire que va desde la cavidad al exterior del vehículo ;
un sistema de aspirador que tiene un conjunto de motor/ventilador que está montado en la cavidad ;
un depósito que comunica con el conjunto de motor/ventilador para recibir residuos a través de una manguera de vacío ; y
un recorrido de aire refrigerante que va desde una entrada de aire refrigerante en la pared de cabina, al conjunto de motor/ventilador , a la cavidad ,
donde el motor es controlado…
Circuito para un aparato electrodoméstico.
(07/03/2018). Solicitante/s: BSH HAUSGERÁTE GMBH. Inventor/es: GRAW,MARTIN.
Aparato electrodoméstico, que presenta un circuito , cuyo circuito acondiciona una placa de circuito impreso con
- un filtro de ruido , que acondiciona una señal de alta tensión sin ruidos,
- una fuente de alimentación conmutada , con el filtro de ruido para suministrar la señal de alta tensión sin ruido, y
- un control de motor para un motor , que está conectado con la fuente de alimentación conmutada para suministrar una primera tensión pequeña, caracterizado porque
- el control de motor está conectado adicionalmente con el filtro de ruido para suministrar la señal de alta tensión sin ruido.
PDF original: ES-2663068_T3.pdf
Procedimiento para cargar un robot de servicio.
(31/05/2017) Un procedimiento para cargar un robot de servicio, comprendiendo el procedimiento:
(a) acoplar (S12) un terminal de entrada del robot de servicio con un terminal de salida de un aparato de carga para cargar una batería del robot de servicio, si una fuente de alimentación de batería disponible de la batería cae por debajo de un nivel predeterminado;
(b) verificar (S14) si una tensión de carga predeterminada procedente del aparato de carga es introducida en el terminal de entrada del robot de servicio;
(c) si la tensión de carga procedente del aparato de carga no es introducida en el terminal de entrada del robot de servicio en la etapa (b) y si una señal inductiva es generada de salida a partir…
Estación de acoplamiento para un robot móvil.
(24/05/2017). Solicitante/s: DYSON TECHNOLOGY LIMITED. Inventor/es: IRELAND,SIMON.
Una estación de acoplamiento para un robot móvil, que incluye una primera porción lateral y una segunda porción lateral y que aloja un sistema eléctrico que incorpora un medio de entrada de energía, y caracterizada porque el medio de entrada de energía incluye un primer tomacorriente de entrada de energía dispuesto sobre la primera porción lateral y un segundo tomacorriente de entrada de energía dispuesto sobre la segunda porción lateral.
PDF original: ES-2637777_T3.pdf
Robot de cobertura autónoma.
(17/05/2017) Un robot móvil que comprende:
un cuerpo de robot dotado de una dirección de impulsión de avance;
un sistema de impulsión que soporta el cuerpo del robot por encima de una superficie de suelo para maniobrar el robot a través de la superficie de suelo ;
una placa de circuito principal en comunicación con el sistema de impulsión ;
un bastidor de parachoques que define una forma complementaria de una periferia frontal del cuerpo del robot, estando el bastidor del parachoques soportado por el cuerpo del robot; y
un sistema sensor de obstáculos dispuesto en el bastidor del parachoques,…
Aparato de limpieza y procedimiento para el funcionamiento de un aparato de limpieza.
(03/05/2017). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: STRACKE,KAI.
Aparato de limpieza , en particular aspiradora para uso doméstico, con un ventilador y un dispositivo de evaluación y control para la variación de una potencia de aspiración del ventilador en función de un estado de asociación determinado del aparato de limpieza con respecto a una superficie , concretamente un estado de contacto, en el que el aparato de limpieza está colocado sobre la superficie , o un estado sin contacto, en el que el aparato de limpieza está levantado de la superficie , caracterizado por que el dispositivo de evaluación y control está configurado para ajustar la potencia de aspiración en caso de determinar un estado sin contacto a una magnitud mayor que en el caso de determinar un estado de contacto.
PDF original: ES-2672970_T3.pdf
Dispositivo para la aspiración de polvo con aparato aspirador de polvo y bolsa de filtro.
(15/02/2017) Dispositivo para la aspiración de polvo con un aparato aspirador de polvo y una bolsa de filtro de material no tejido, en el que
el aparato aspirador de polvo presenta una potencia de entrada eléctrica nominal de menos de 1200 W, preferentemente menos de 1100 W, de manera especialmente preferente menos de 900 W,
el aparato aspirador de polvo presenta una unidad de motor-ventilador y una unidad de regulación que regula el aparato aspirador de polvo de modo que la corriente de aire se mantenga, al cargarse la bolsa de filtro con polvo de prueba DMT8, de manera análoga a la norma EN 60312, de manera esencialmente constante en un valor de al menos 34 l/s, preferentemente de manera esencialmente…
Aspirador y procedimiento para accionar el mismo.
(15/02/2017) Un aspirador, que comprende:
un motor configurado para hacer girar un ventilador colector;
una batería configurada para proporcionar una primera tensión de CC;
un convertidor de tensión configurado para convertir una tensión de CA recibida desde una fuente de energía en una segunda tensión de CC;
un selector de tensión configurado para seleccionar una de la primera tensión de CC y de la segunda tensión de CC; y
un excitador configurado para accionar el motor utilizando la tensión seleccionada,
caracterizado porque
el excitador está configurado para disminuir selectivamente la tensión seleccionada basándose en el estado de la tensión de CA y para accionar el motor utilizando la tensión selectivamente disminuida,
…
Robot limpiador y método para controlar el mismo.
(21/12/2016). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: LEE,HAESOO, CHOE,SEUNGHOE, LEE,KANGYOUL, BAE,WEONHO, KANG,MINJUNG.
Robot limpiador que incluye por lo menos un dispositivo de obtención de imágenes y una pluralidad de dispositivos de obtención de sonido y una base de datos de sonidos, caracterizado el robot limpiador por que comprende:
un controlador configurado para: determinar si un sonido obtenido a través de cada uno de la pluralidad de dispositivos de obtención de sonidos es anómalo calculando la similitud entre el sonido obtenido por la pluralidad de dispositivos de obtención de sonidos y sonidos almacenados en la base de datos de sonidos; captar la dirección en la que se genera un sonido anómalo; y obtener una imagen de la dirección en la que se genera el sonido anómalo a través del por lo menos un dispositivo de obtención de imágenes.
PDF original: ES-2613138_T3.pdf
Procedimiento para controlar un aspirador automático.
(07/12/2016). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: JANG,JAEWON, CHOI,JOONSIK.
Un procedimiento para controlar un aspirador automático , que comprende:
mover el aspirador automático con un conjunto de cepillo lateral en un primer tipo de operación;
determinar un rincón durante el movimiento del aspirador automático en función de una señal procedente de un sensor de obstáculos;
cambiar el primer tipo de operación del conjunto de cepillo lateral a un segundo tipo de operación para limpiar (S5) el rincón cuando se determine el rincón;
determinar (S6) si el rincón está limpiado; y
volver del segundo tipo de operación del conjunto de cepillo lateral al primer tipo de operación cuando el rincón está limpiado,
caracterizado por que
durante la limpieza del rincón, se mantiene el aspirador automático en un estado fijo.
PDF original: ES-2617079_T3.pdf
Estación de acoplamiento para un robot móvil.
(07/12/2016). Solicitante/s: DYSON TECHNOLOGY LIMITED. Inventor/es: IRELAND,SIMON, GARNER,LEANNE, LAMBERT,ADAM.
Una estación de acoplamiento portátil para un robot móvil , comprendiendo la estación de acoplamiento una porción de base que se puede situar sobre una superficie de suelo y una porción trasera , y caracterizada porque la porción trasera es pivotable con respecto a la porción de base.
PDF original: ES-2617911_T3.pdf
Robot aspirador y un procedimiento para la detección de polvo en el mismo.
(30/11/2016). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: VENKAT,RAJU C.P, ROSHY,MANAYIL JOHN.
Un robot aspirador que comprende un motor de aspiración que está instalado dentro de un cuerpo principal y que está configurado para generar una fuerza de aspiración, comprendiendo el robot aspirador:
al menos dos placas conductoras que están separadas una de la otra para formar una trayectoria de flujo para el aire externo introducido por la fuerza de aspiración; y
un calculador que está configurado para medir un valor de la capacitancia entre las al menos dos placas conductoras ;
caracterizado por
una estructura porosa que está provista de al menos un orificio pasante (H) a través del cual fluye el aire introducido por la fuerza de aspiración;
un filtro que está dispuesto en una trayectoria de flujo del aire y configurado para filtrar el polvo contenido en el aire; y
una unidad de alimentación de potencia eléctrica que está configurada para aplicar potencia eléctrica en corriente alterna (CA) a la superficie al menos parcial de la estructura porosa.
PDF original: ES-2617306_T3.pdf
Aspirador robot y procedimiento para controlar el mismo.
(16/11/2016). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: JANG,JAEWON, PARK,SUNGIL, KIM,HWANG.
Un aspirador robot que comprende:
un cuerpo provisto de una porción de succión;
una rueda delantera auxiliar dispuesta en el cuerpo ;
una rueda principal dispuesta en un lado trasero de la rueda delantera auxiliar y dispuesta de tal manera que una altura de la rueda principal es variable con respecto al cuerpo ; y
una unidad de accionamiento configurada para subir o bajar la rueda principal con respecto al cuerpo ,
caracterizado porque
la unidad de accionamiento baja la rueda principal cuando la rueda delantera auxiliar entra en una porción escalonada, y
la unidad de accionamiento levanta la rueda principal cuando la rueda principal hace contacto con una superficie superior de la porción escalonada.
PDF original: ES-2615526_T3.pdf
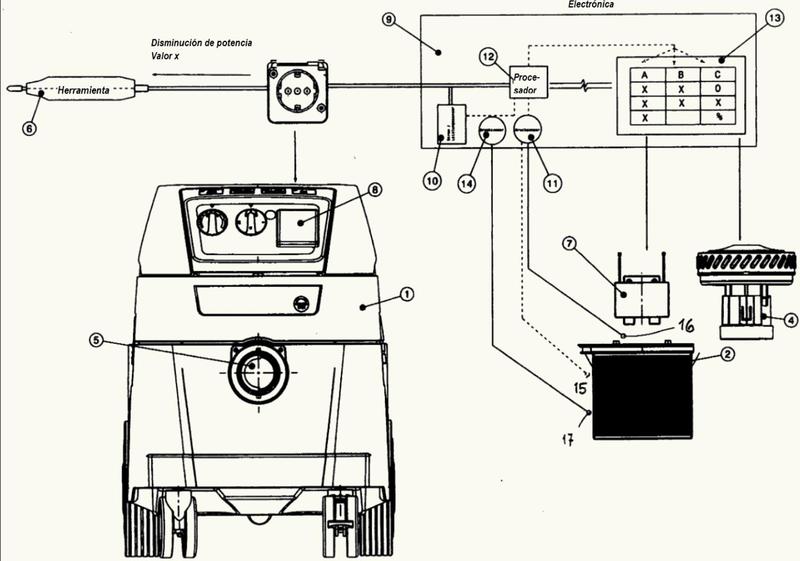
(12/10/2016). Solicitante/s: DE'' LONGHI APPLIANCES SRL CON UNICO SOCIO. Inventor/es: DE\' LONGHI, GIUSEPPE, TOMÈ,ALESSANDRO, MAZZOLO,EMANUELE.
Aspiradora que comprende un motor eléctrico para accionar la succión, una unidad de control electrónica para controlar la potencia eléctrica suministrada por dicho motor eléctrico y uno o más accesorios de succión terminales de diferentes tipos y/o cada uno teniendo diferentes condiciones de funcionamiento, caracterizada por que comprende un dispositivo para mandar dicha unidad de control electrónica , que está provista de al menos un selector de potencia proporcionado en un respectivo accesorio de succión terminal y al menos un miembro de mando conectado a dicha unidad de control electrónica y capaz de activarse selectivamente mediante dicho al menos un selector de potencia para establecer automáticamente dicha unidad de control electrónica a al menos un valor máximo (P1, P2) de potencia eléctrica suministrada por dicho motor eléctrico , dependiendo del tipo y/o de la condición de funcionamiento de dichos uno o más accesorios de succión terminales.
PDF original: ES-2606186_T3.pdf
Robot móvil para limpieza de suelos con detección del tipo de suelo.
(24/08/2016). Solicitante/s: IROBOT CORPORATION. Inventor/es: SANTINI,FABRIZIO.
Un robot de limpieza que comprende:
un bastidor ;
un accionamiento conectado al bastidor y configurado para accionar el robot a través de la superficie del suelo;
un conjunto de cabeza de limpieza acoplado al bastidor y posicionado para aplicarse a la superficie del suelo mientras el robot es maniobrado por el accionamiento;
caracterizado por un sensor de movimiento que responde a cambios en el cabeceo, siendo transportado el sensor de movimiento por el bastidor; y
un circuito controlador en comunicación con el conjunto de cabeza de limpieza y el sensor de movimiento, estando configurado el circuito controlador para determinar un tipo de solado o revestimiento asociado con una característica de limpieza del robot y configurado para alterar la característica de limpieza del robot en función de una señal procedente del sensor de movimiento indicativa de un cambio en el cabeceo provocado por el robot al atravesar una discontinuidad del solado.
PDF original: ES-2634251_T3.pdf
Disposición de aspirador.
(17/08/2016) Una disposición que comprende un aspirador de escoba, comprendiendo el aspirador de escoba una unidad de mano de succión que está conectada con un utensilio para el suelo por medio de una barra alargada de succión, comprendiendo la disposición, además, una estación de recepción montable en la pared dispuesta para bloquear el aspirador de escoba en una pared, de forma que pueda ser liberado, en una posición de recepción vertical cuando no se encuentra en uso;
caracterizada porque:
la estación de recepción comprende un miembro superior de sujeción y un miembro inferior de sujeción, teniendo el miembro superior de sujeción la forma de una cuna de recepción dispuesta para recibir una primera parte de…
(27/07/2016). Solicitante/s: EUROFILTERS HOLDING N.V. Inventor/es: SAUER, RALF, SCHULTINK, JAN.
Robot aspirador , que comprende un dispositivo de aspiración montado sobre ruedas y un dispositivo de alimentación de corriente montado sobre ruedas ,
comprendiendo el dispositivo de aspiración una tobera de suelo, un separador de polvo y una unidad de ventilador de motor para aspirar un flujo de aire mediante la tobera de suelo,
presentando el dispositivo de aspiración un dispositivo de accionamiento , para accionar al menos una de las ruedas del dispositivo de aspiración , y
presentando el dispositivo de alimentación de corriente un dispositivo de accionamiento , para accionar al menos una de las ruedas del dispositivo de alimentación de corriente ,
estando unido el dispositivo de alimentación de corriente a través de un cable de alimentación de corriente al dispositivo de aspiración para alimentar corriente al dispositivo de aspiración.
PDF original: ES-2640394_T3.pdf
(08/06/2016). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: KIM, SUNG-GUEN, KIM,BONG-JU, SHIM,IN-BO, SUNG,JI-HOON, YIM,BYUNG-DOO.
Un robot limpiador que comprende:
un cuerpo principal en el que se dispone la unidad de succión de polvo ;
soportes dispuestos en ambos lados de la unidad de succión de polvo; y
un agitador instalado en los soportes para eliminar sustancias extrañas de un área de trabajo, caracterizado por que el agitador comprende ejes de fijación que tienen una forma no circular y que proporcionan un centro de rotación y los soportes comprenden una parte de inserción de eje en la que se inserta el eje de fijación y
uno de los soportes tiene una abertura en una superficie lateral para formar un agujero de acoplamiento de manera que uno de los ejes de fijación se puede insertar a través del mismo,
en donde una distancia entre los soportes es equivalente a una longitud del agitador excluyendo los ejes de fijación y menor que una longitud de agitador incluyendo los ejes de fijación.
PDF original: ES-2582006_T3.pdf
Robot limpiador, sistema de robot limpiador y método de control del mismo.
(25/05/2016) Un robot limpiador que comprende una funda; un dispositivo de succión proporcionado en la funda; una boquilla de succión para succionar polvo de un suelo mediante el accionamiento del dispositivo de succión; un dispositivo de recogida de polvo para recoger sustancias extrañas contenidas en el aire succionado por medio de la boquilla de succión; una unidad de rueda para permitir que la funda se accione automáticamente; y un controlador principal para controlar el accionamiento del dispositivo de succión y la unidad de rueda,
en el que el robot limpiador comprende además,
un módulo Wi-Fi proporcionado en la funda, caracterizado por que dicho módulo Wi-Fi proporciona un Punto de Acceso "AP"; en el que dicho robot limpiador comprende además un módulo NFC proporcionado…
Dispositivo de carga de robot limpiador.
(10/03/2016) Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
un cuerpo principal que comprende una unidad de terminal configurada para cargar el robot limpiador, definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción dispuesta en un lado del cuerpo principal para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción dispuesto en un lado de la unidad generadora de señal de inducción para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal de inducción,
en que la unidad generadora de señal de inducción comprende al menos un par de sensores de inducción de…
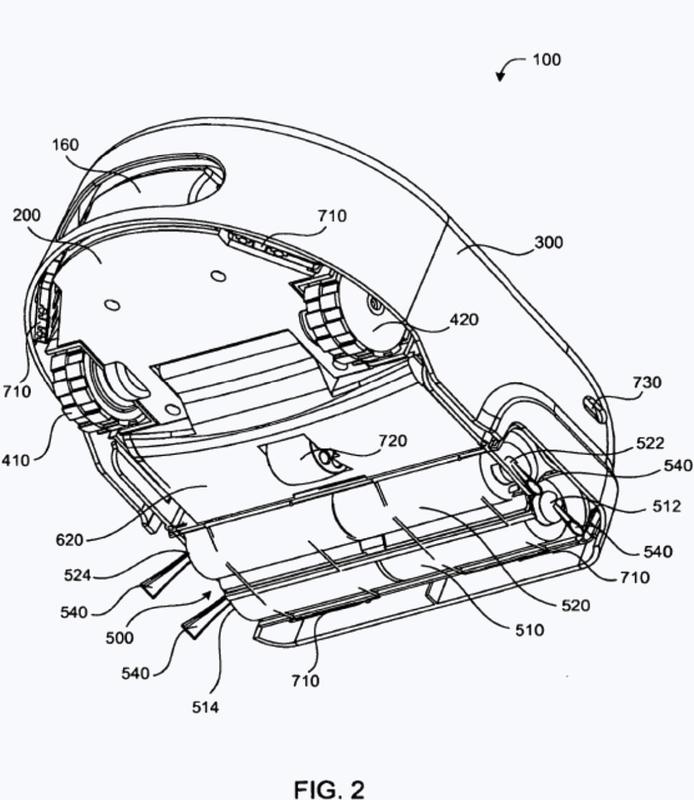
Robot autónomo de cubrimiento compacto.
(02/03/2016) Un robot autónomo de cubrimiento que comprende:
un chasis que tiene una parte delantera y una parte posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por la parte posterior del chasis y configurado para maniobrar el robot sobre una superficie de limpieza, comprendiendo el sistema de accionamiento ruedas motrices derecha e izquierda accionadas de manera diferencial por motores correspondientes derecho e izquierdo ;
un controlador en comunicación con el sistema de accionamiento , donde el controlador está configurado para maniobrar el robot a fin de que pivote sobre sí mismo;
un conjunto de limpieza montado…
(10/02/2016). Ver ilustración. Solicitante/s: ELECTROSTAR GmbH. Inventor/es: BRUNTNER,EUGEN, SEELING,MICHAEL, HERNÁNDEZ-FRANCH,PABLO VILLALVA.
Aspirador con al menos un motor , con una conexión de aspiración para un aparato que va a unirse con el aspirador, tal como una herramienta, con al menos un filtro y una caja de enchufe para aparatos eléctricos, a la que puede conectarse eléctricamente el aparato , presentando el aspirador al menos un sensor de corriente/potencia que registra el consumo de corriente/potencia del aparato conectado a la caja de enchufe de aparatos eléctricos y que está conectado a un procesador que, teniendo en cuenta el valor de consumo de corriente/potencia suministrado por el sensor de corriente/potencia, suministra una señal para el comienzo de la limpieza del filtro , caracterizado por que, en el caso de un aparato con un consumo de corriente/potencia bajo, se comienza una limpieza de filtro en intervalos sustancialmente mayores que en el caso de un aparato con un consumo de corriente/potencia alto.
PDF original: ES-2565309_T3.pdf
Robot autónomo de cubrimiento compacto.
(10/02/2016). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Inventor/es: MAMMEN,JEFFREY W, SCHNITTMAN,MARK, DUBROVSKY,ZIVTHAN A, SOLOCHEK,AARON.
Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ; y
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
caracterizado por que el robot comprende además sensores antichoque dispuestos en las esquinas delanteras del chasis , con al menos un sensor antichoque dispuesto a cada lado de cada esquina, permitiendo así que el robot determine una dirección y / o una ubicación de una colisión.
PDF original: ES-2559128_T3.pdf
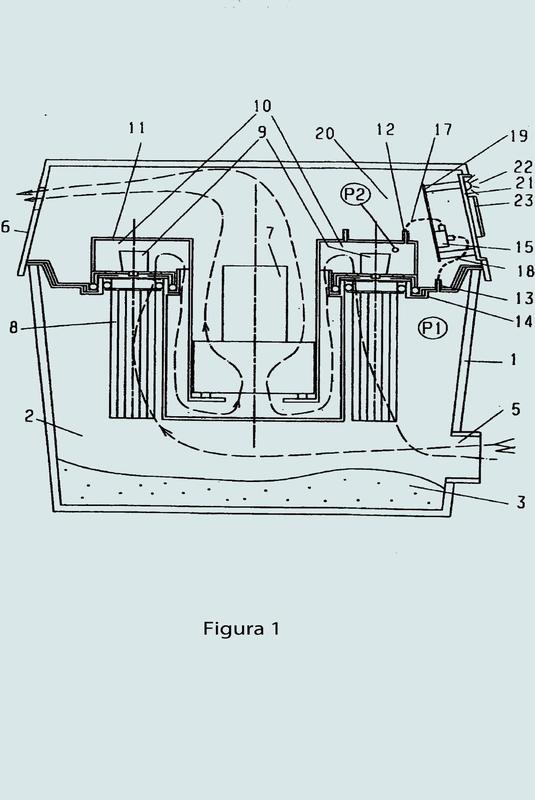
(16/12/2015). Ver ilustración. Solicitante/s: ELECTROSTAR GmbH. Inventor/es: BRUNTNER,EUGEN, SEELING,MICHAEL, HERNÁNDEZ-FRANCH,PABLO VILLALVA.
Aspirador con al menos una conexión de aspiración para un aparato con al menos un motor , con al menos un filtro y con al menos una cámara de flujo delante del filtro y con al menos una cámara de flujo detrás del filtro , estando ambas cámaras de flujo provistas con al menos un punto de medición al que se conecta al menos un sensor de presión , que está conectado mediante señales a un controlador que envía una señal cuando la diferencia de presión (ΔP) entre las presiones (P1, P2) en las dos cámaras de flujo alcanza un valor límite, caracterizado porque uno de los sensores de presión es un sensor de presión diferencial, que con dos puntos de medición para detectar la presión diferencial (ΔP) está conectado entre las dos cámaras de flujo y que el otro sensor de presión es un sensor de presión absoluta que mide la presión (P2) después del filtro.
PDF original: ES-2563182_T3.pdf
Aspirador de polvo y procedimiento para el funcionamiento de un aspirador de polvo.
(16/09/2015) Aspirador de polvo con
- un motor de soplante ,
- un espacio de polvo para el alojamiento de un filtro principal y
- un sistema sensor para la detección de una magnitud que caracteriza el caudal de aire,
- una unidad electrónica , que inicia un modo de avería, en el que el sensor de soplante es accionado con potencia reducida, cuando el caudal de aire permanece ininterrumpido durante un primer periodo de tiempo predeterminable por debajo de un valor límite predeterminable del caudal, caracterizado porque la unidad electrónica comprende un miembro de tiempo para la supervisión de la…
{kind=link}
{kind=link}
{kind=link}