CIP-2021 : B25J 3/00 : Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
CIP-2021 › B › B25 › B25J › B25J 3/00[m] › Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 3/02 · dotados de un acoplamiento en paralelogramo entre la unidad de control y la unidad controlada (pantógrafos B43L 13/00).
B25J 3/04 · dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de control para un instrumento quirúrgico.
(26/02/2020) Un mecanismo de rotación de instrumento para un dispositivo de alcance quirúrgico, comprendiendo el mecanismo de rotación de instrumento:
una carcasa montable en un extremo proximal de un canal de instrumento de un dispositivo de alcance quirúrgico;
un accionador proximal montado para girar en relación con la carcasa;
un elemento de transferencia de fuerza alargado configurado para montarse de manera deslizable en el interior y para extenderse a lo largo del canal de instrumento de un dispositivo de alcance quirúrgico;
un acoplador proximal acoplado operativamente al accionador proximal y al elemento de transferencia de fuerza alargado para transformar un movimiento rotacional del accionador proximal en relación con la carcasa en un movimiento lineal del elemento de transferencia de fuerza…
Sistema médico de obtención de imágenes con brazo mecánico.
(19/06/2019). Solicitante/s: Telefield Medical Imaging Limited. Inventor/es: ZHENG,YONGPING, CHEUNG,JAMES CHUNG WAI, MAK,TAK MAN.
Un sistema médico de obtención de imágenes, con un brazo mecánico que incluye
un sensor de posición y un sensor de presión montado en el brazo mecánico , dicho sensor de presión es para monitorizar la fuerza de actuación del brazo mecánico,
un soporte de paciente adaptado para estar vertical en uso para que un paciente esté de pie orientado hacia el soporte de paciente ,
una sonda , en donde el brazo mecánico se monta en el soporte de paciente , la sonda se monta en un extremo alejado del soporte de paciente , del brazo mecánico ,
un controlador, en donde el controlador puede controlar el brazo mecánico para impulsar la sonda para implementar una ruta de movimiento de múltiples grados de libertad para obtención de imágenes de una columna vertebral según señales detectadas por el sensor de posición y el sensor de presión, y en donde el sensor de posición es para recoger la posición espacial de la sonda.
PDF original: ES-2717126_T3.pdf
Sistemas de soporte de brazo adaptativos y métodos de uso.
(21/03/2018) Un sistema para soportar un brazo (Ar) de un usuario (U), incluyendo:
un arnés configurado para ser llevado puesto en el cuerpo de un usuario;
un soporte de brazo acoplado al arnés configurado para soportar un brazo del usuario, estando configurado el soporte de brazo para acomodar el movimiento del brazo al mismo tiempo que sigue el movimiento sin interferir sustancialmente con el movimiento del brazo del usuario; y
uno o varios elementos de compensación acoplados al soporte de brazo para aplicar una fuerza de compensación para compensar al menos parcialmente una fuerza gravitacional que actúa en el brazo cuando el usuario se mueve y el soporte de brazo sigue el movimiento del brazo del usuario, donde el soporte de brazo incluye:
un primer segmento de soporte de brazo acoplado pivotantemente…
Plataforma robótica móvil altamente personalizable para redes de sensores móviles.
(28/10/2016). Solicitante/s: CASTELLÓ FERRER, Eduardo. Inventor/es: CASTELLÓ FERRER,Eduardo, DONG,Haison.
Plataforma robótica móvil altamente personalizable para redes de sensores móviles. La plataforma comprende al menos una pieza de su cuerpo fabricada por impresión en 3D así como al menos tres componentes electrónicos de código abierto y tiene un diámetro menor que 15 cm.
Dicha plataforma está destinada a probar algoritmos de redes de sensores móviles en entornos de laboratorio de interiores.
PDF original: ES-2588065_B1.pdf
PDF original: ES-2588065_A1.pdf
ESTRUCTURA DE PLATAFORMA ROBÓTICA.
(21/05/2015). Solicitante/s: ANTEL USA INC. Inventor/es: VISCA,Jorge, MARGENAT,Pablo, AGUIRRE,Andrés.
La invención se refiere a una estructura de plataforma robótica preferentemente aplicable en trabajos manuales con niños y adolescentes, que permite la simplificación de la tarea de armado. Dicha estructura comprende una base, un módulo de construcción, un módulo de unión, un tornillo y una tuerca. El módulo de construcción aumenta la velocidad de armado y gracias a sus particulares características de protuberancias y orificios estratégicamente dispuestos, con un solo tornillo se generan estructuras más firmes sin problemas de pivoteo.
Exoesqueleto robótico para movimiento de un miembro.
(23/07/2014) Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, la primera conexión mecánica que incluye conexiones para dicho acoplamiento a la primera unión seleccionada, con al menos una unión que tiene articulación alrededor de un eje; y
medio de sujeción del miembro para sujetar el miembro a la conexión;
en donde la primera conexión mecánica define una unión virtual que tiene un eje que no se localiza en la conexión mecánica;
en donde la unión virtual se acopla a la primera unión seleccionada del miembro cuando el miembro se sujeta a la conexión;
en donde la primera conexión mecánica no se localiza en, o a lo largo de un eje de la primera unión seleccionada del miembro cuando la primera unión seleccionada…
DISPOSITIVO DE MOVIMIENTO PARA ROBOTS.
(01/04/2013) Dispositivo de movimiento para robots que comprende un primer mecanismo plano que permite un movimiento horizontal (MH) y vertical (MV) de un punto extremo (P) situado en el mismo mediante un primer actuador y un segundo actuador respectivamente. Dicho dispositivo comprende adicionalmente un segundo mecanismo plano que se articula respecto a un chasis principal y respecto a un chasis auxiliar sobre el que se articula a su vez el primer mecanismo plano , donde dicho segundo mecanismo plano permite un movimiento lateral (ML) del punto extremo (P) por medio de un tercer actuador . El primer y el segundo mecanismo plano se encuentran configurados para proporcionar una trayectoria rectilínea del punto extremo (P) para cada uno de sus movimientos horizontal, vertical y lateral cuando se opera uno de los actuadores …
(16/04/2006) Telemanipulador, del tipo que comprende un brazo maestro y un brazo esclavo destinado a reproducir los movimientos del brazo maestro ; estando dicho brazo esclavo situado en el interior de un recinto de confinamiento y siendo apto para ser desenganchado, estando dicho brazo maestro situado en el exterior del recinto de confinamiento y estando los indicados brazos maestro y esclavo conectados por un mecanismos que atraviesa una pared (P) del recinto de confinamiento; estando el indicado brazo maestro conectado con un tubo de conexión con el indicado mecanismo que atraviesa la pared (P) del recinto de confinamiento; y estando el mecanismo que atraviesa la pared montado de forma fija en la pared (P) y presentando una primera interfaz…
MANO MANIPULABLE PARA UNA LAPAROSCOPIA.
(01/10/1997) SE PRESENTA UNA MANO MANIPULABLE A UTILIZAR EN UNA OPERACION QUIRURGICA LAPAROSCOPICA QUE TIENE UNA MANO MAESTRA O DE CONTROL CON UNAS AGARRADERAS PARA ACOPLAR LA MANO MAESTRA A LA DEL OPERADOR, EN DONDE LA MANO MAESTRA TIENE AL MENOS UN DEDO Y EL DEDO TIENE AL MENOS UNA ARTICULACION CORRESPONDIENTE A UNA ARTICULACION INTERFALANGEAL DE UNA MANO HUMANA. LA MANO MANIPULABLE INCLUYE ADEMAS UNA MANO ESCLAVA O CONTROLADA, DISPUESTA DE FORMA ALEJADA DEL OPERADOR, EN DONDE LA MANO ESCLAVA TIENE AL NEOS UNA ARTICULACION CORRESPONDIENTE A UNA ARTICULACION INTERFALANGEAL DE UN DEDO HUMANO. TANTO LA ARTICULACION MAESTRA COMO LA ESCLAVA PUEDEN MOVERSE DE UNA FORMA CORRESPONDIENTE A LA FLEXION Y EXTENSION DE UN DEDO HUMANO. LA MANO MAESTRA Y LA MANO ESCLAVA ESTAN CONECTADAS MEDIANTE UNAS VARILLAS O CABLES…
BRAZO ELECTROMECANICO PRENSIL.
(01/04/1993). Ver ilustración. Solicitante/s: SIMECAD, S.L. Inventor/es: RODRIGUEZ MARTINEZ, JUAN.
BRAZO ELECTROMECANICO PRENSIL, CARACTERIZADO PORQUE SE CONSTITUYE POR UN CUERPO TUBULAR, EN UNO DE CUYOS EXTREMOS VA INSTALADO UN MOTOR EL CUAL LLEVA ACOPLADO EN SU EJE UN HUSILLO, SOBRE EL QUE QUEDA MONTADA UNA TUERCA DE BOLAS, SOLIDARIA DE UN VASTAGO ANTIGIRO QUE ATRAVIESA CON POSIBILIDAD DE LIBRE DESLIZAMIENTO A UNA GUIA LINEAL QUE IMPIDE EL GIRO DE DICHO CONJUNTO DE LA TUERCA; EN TANTO QUE EL MENCIONADO VASTAGO SOLIDARIO DE LA TUERCA INCORPORA EN SU EXTREMO A UNA CABEZA DESTINADA PARA EL ACOPLAMIENTO DE LOS UTILES NECESARIOS PARA LA EJECUCION DE LAS OPERACIONES QUE SE DESEEN REALIZAR.
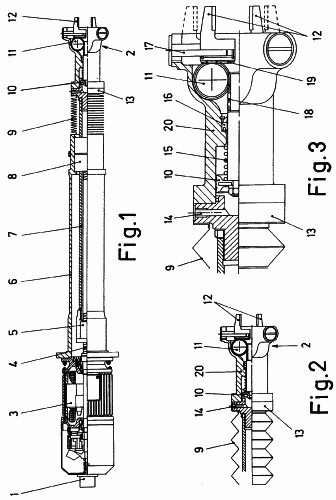
MANIPULADOR ARTICULADO Y EQUILIBRADO.
(16/06/1979) Manipulador articulado y equilibrado aplicable en mandos a distancia a través de tabiques, del tipo que comporta un brazo maestro y un brazo esclavo, y que puede trabajar en una cámara limitada por una pared provista de un orificio de introducción del citado brazo esclavo en la citada cámara, caracterizado porque comporta una caña central de forma cilíndrica, una placa de paso a través, susceptible de fijarse a la citada pared al nivel del citado orificio, estando la citada caña montada en forma pivotante en la citada placa, comportando la citada caña un muñón de manutención, externo a la cámara, poseyendo la citada caña central una primera y una segunda extremidad estando el brazo esclavo articulado a la citada…
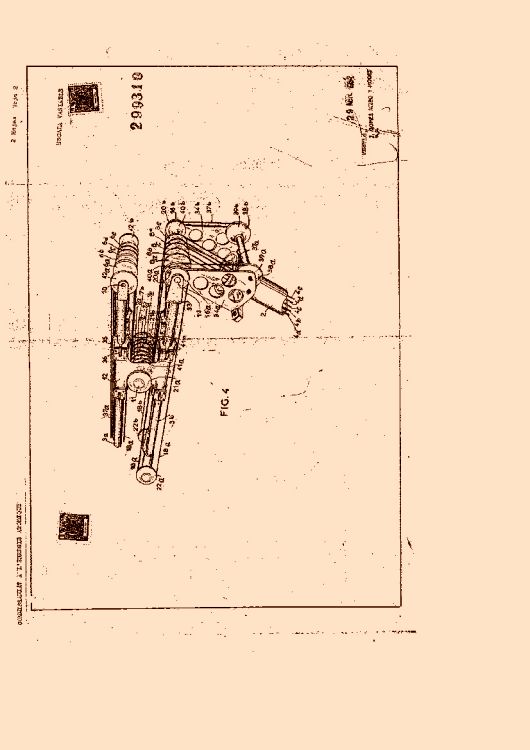
PERFECCIONAMIENTOS EN LA CONSTRUCCION DE DISPOSITIVOS DE DECALAJE EN PROFUNDIDAD PARA TELEMANIPULACIONES PRINCIPAL- ESCLAVO.
(16/06/1975). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
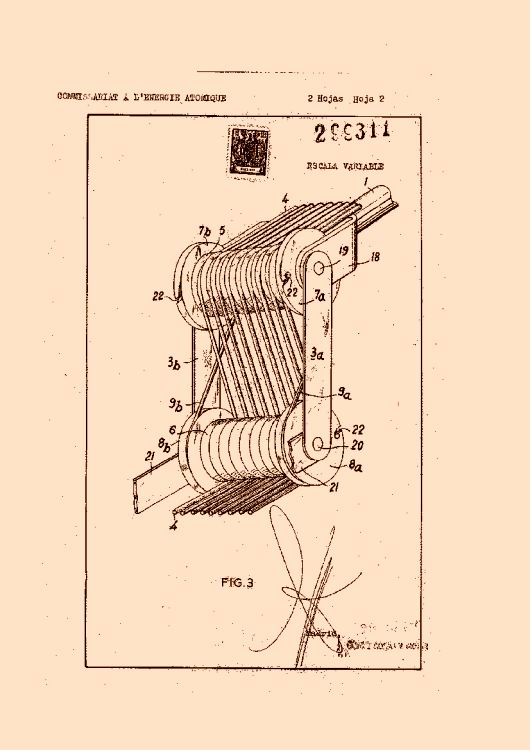
PERFECCIONAMIENTOS EN LA CONSTRUCCION DE TELEMANIPULADORES ARTICULADOS ARTICULADOS PRINCIPAL-ESCLAVO.
(16/06/1975). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
PERFECCIONAMIENTOS EN DISPOSITIVOS MANIPULADORES MAESTRO- ESCLAVOS.
(01/01/1969). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
PERFECCIONAMIENTOS EN LOS DISPOSITIVOS DE ARTICULACIÓN CON TRANSMISIÓN DE MOVIMIENTOS.
(16/08/1964). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
PERFECCIONAMIENTOS EN LOS DISPOSITIVOS DE ARTICULACIÓN CON TRANSMISIÓN DE MOVIMIENTOS.
(01/07/1964). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
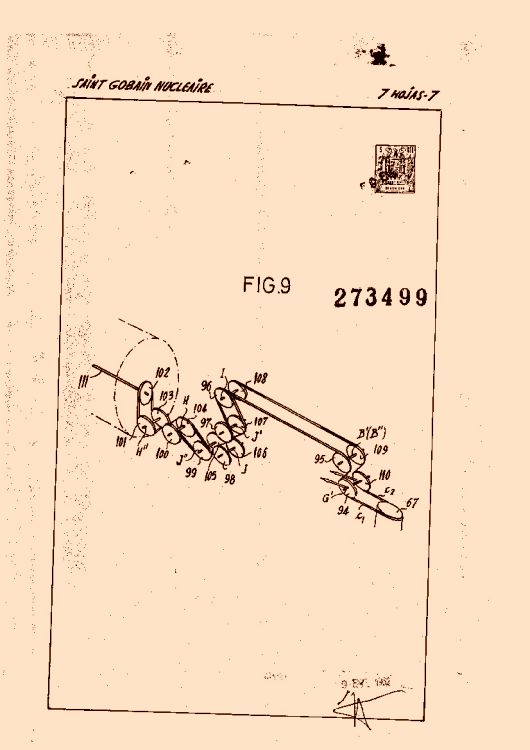
UN TELEMANIPULADOR MECÁNICO PARA EL TRABAJO EN RECINTO PELIGROSO.
(01/04/1962). Ver ilustración. Solicitante/s: SAINT GOBAIN NUCLEAIRE.
Resumen no disponible.
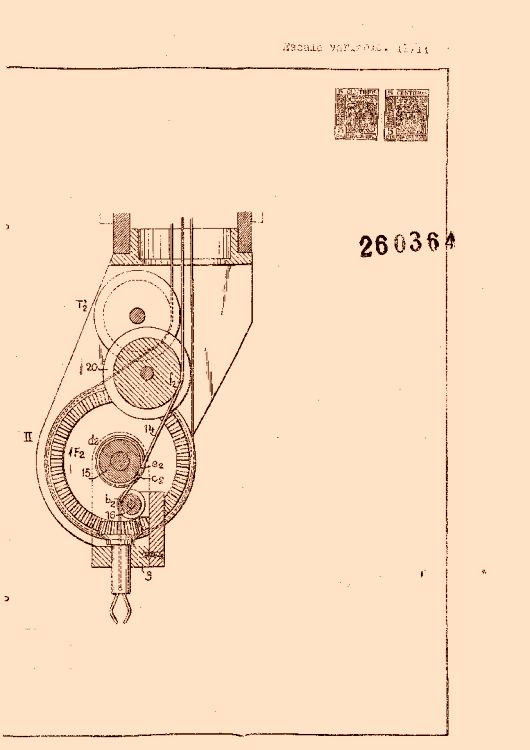
DISPOSITIVO DE CABEZA DE MANDO.
(01/11/1960). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Dispositivo de cabeza de mando del tipo "rodillera" para telemanipulador, que tiene un elemento tubular llevador por un soporte oscilante y atravesado axialmente por un cable destinado a unir un órgano de mando a un órgano movido, siendo notable porque, por una parte, el eje de oscilación del soporte oscilante está constituido por un gorrón único que atraviesa de parte a parte la cabeza y, por otra parte, la guía del cable está asegurada por la combinación de una polea montada loca sobre este gorrón llevado por el soporte fijo y de una roldana destinada a llevar el cable al eje del elemento tubular que pivota en este soporte, después de un cierto enrollamiento de este cable con relación a esta polea, una segunda polea llevada por la cabeza para dar a la porción del cable comprendida entre las dos poleas una dirección invariable.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}