MANIPULADOR ARTICULADO Y EQUILIBRADO.
Manipulador articulado y equilibrado aplicable en mandos a distancia a través de tabiques,
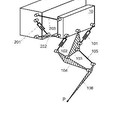
del tipo que comporta un brazo maestro y un brazo esclavo, y que puede trabajar en una cámara limitada por una pared provista de un orificio de introducción del citado brazo esclavo en la citada cámara, caracterizado porque comporta una caña central de forma cilíndrica, una placa de paso a través, susceptible de fijarse a la citada pared al nivel del citado orificio, estando la citada caña montada en forma pivotante en la citada placa, comportando la citada caña un muñón de manutención, externo a la cámara, poseyendo la citada caña central una primera y una segunda extremidad estando el brazo esclavo articulado a la citada primera extremidad y constituido por n(n siempre superior a 1) segmentos de forma sensiblemente cilíndrica montados a tope entre sí y articulados los unos respecto a los otros, estando el último segmento provisto de un útil, estando el brazo maestro articulado a la citada segunda extremidad y constituido por n segmentos de forma sensiblemente cilíndrica, montados a tope, articulados entre si, estando el último elemento provisto de una empuñadura de mando y de un contrapeso, siendo los segmentos del brazo maestro homotéticos de los del brazo esclavo con respecto al punto de intersección del eje de simetría de la caña central con el eje de simetría del citado muñón, según una relación de homotecia negativa igual a -K, estando las masas de los elementos homotéticos en una proporción sensiblemente igual a 1/k; y comportando, asimismo, elementos de cadenas, correas, cables o bandas, así como de poleas, para transmitir al brazo esclavo los movimientos del brazo maestro, de manera que, en todo momento, el ángulo formado por dos segmentos del brazo maestro ye el ángulo formado por los dos segmentos homotéticos del brazo esclavo, sean iguales y opuesto, teniendo un segmento del brazo maestro unas dimensiones iguales a k veces las del segmento correspondiente del brazo esclavo.
Tipo: Resumen de patente/invención.
Solicitante: COMMISARIAT A L'ENERGIE ATOMIQUE.
Nacionalidad solicitante: Francia.
Fecha de Solicitud: 22 de Diciembre de 1977.
Fecha de Publicación: .
Fecha de Concesión: 24 de Marzo de 1979.
Clasificación Internacional de Patentes:
- B25J3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
Patentes similares o relacionadas:
Dispositivo de control para un instrumento quirúrgico, del 26 de Febrero de 2020, de Creo Medical Limited: Un mecanismo de rotación de instrumento para un dispositivo de alcance quirúrgico, comprendiendo el mecanismo de rotación de instrumento: una carcasa […]
Sistema médico de obtención de imágenes con brazo mecánico, del 19 de Junio de 2019, de Telefield Medical Imaging Limited: Un sistema médico de obtención de imágenes, con un brazo mecánico que incluye un sensor de posición y un sensor de presión montado en el brazo mecánico , dicho […]
Sistemas de soporte de brazo adaptativos y métodos de uso, del 21 de Marzo de 2018, de Enhance Technologies, LLC: Un sistema para soportar un brazo (Ar) de un usuario (U), incluyendo: un arnés configurado para ser llevado puesto […]
Plataforma robótica móvil altamente personalizable para redes de sensores móviles, del 28 de Octubre de 2016, de CASTELLÓ FERRER, Eduardo: Plataforma robótica móvil altamente personalizable para redes de sensores móviles. La plataforma comprende al menos una pieza de su cuerpo […]
ESTRUCTURA DE PLATAFORMA ROBÓTICA, del 21 de Mayo de 2015, de ANTEL USA INC: La invención se refiere a una estructura de plataforma robótica preferentemente aplicable en trabajos manuales con niños y adolescentes, que permite la […]
 Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
 DISPOSITIVO DE MOVIMIENTO PARA ROBOTS, del 1 de Abril de 2013, de UNIVERSIDAD CASTILLA - LA MANCHA: Dispositivo de movimiento para robots que comprende un primer mecanismo plano que permite un movimiento horizontal (MH) y vertical (MV) de un punto extremo (P) situado […]
DISPOSITIVO DE MOVIMIENTO PARA ROBOTS, del 1 de Abril de 2013, de UNIVERSIDAD CASTILLA - LA MANCHA: Dispositivo de movimiento para robots que comprende un primer mecanismo plano que permite un movimiento horizontal (MH) y vertical (MV) de un punto extremo (P) situado […]
TELEMANIPULADOR., del 16 de Abril de 2006, de SOCIETE D'INNOVATIONS TECHNIQUES SIT: Telemanipulador, del tipo que comprende un brazo maestro y un brazo esclavo destinado a reproducir los movimientos del brazo maestro ; estando […]