CIP-2021 : B25J 18/02 : extensibles.
CIP-2021 › B › B25 › B25J › B25J 18/00 › B25J 18/02[1] › extensibles.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 18/00 Brazos.
B25J 18/02 · extensibles.
CIP2021: Invenciones publicadas en esta sección.
Grúa de soldadura con cabezal de soldadura.
(01/01/2020) Una grúa de soldadura para soldadura de objetos, cuya grúa de soldadura comprende:
un brazo (A) que incluye al menos un primer y un segundo segmento que están dispuestos con sus respectivos ejes longitudinales de manera esencialmente paralela y que se pueden mover telescópicamente a lo largo de sus ejes longitudinales unos en relación a otros de modo que al menos un segundo segmento de dichos segmentos se deslice al menos parcialmente en al menos un primer segmento de dichos segmentos,
un soporte , y
un cabezal de soldadura dispuesto en un extremo distal de un segmento más externo de dichos segmentos del brazo (A), y en donde un segmento más interno de dichos segmentos del brazo (A) está suspendido en el soporte , y que…
GRUA ELECTRICA PORTANTE PARA MOVIMIENTO DE CARGAS Y RECIPIENTES CONTENEDORES DE COGIDA VERTICAL Y VACIADO SIN VOLTEO.
(02/05/2019). Solicitante/s: PÉREZ VERA, Aquilino. Inventor/es: PÉREZ VERA,Aquilino.
Grúa eléctrica portante para movimiento de cargas y recipientes contenedores de cogida vertical y vaciado sin volteo, para su integración en el conjunto del vehículo, alimentada por generador síncrono a 400 voltios, gestionada por un autómata programable compatible e integrado con el resto del equipo carrozado,que da servicio a los motores y actuadores de extensión y retracción de los tramos de la grúa y del dispositivo de maniobra automatizada del contenedor.Así, el referido dispositivo de maniobra integra tres mecanismos, que se accionan en 4 ejes verticales, dispuestos paralelos y coplanarios, controlados por PLC operando de forma independiente, sin servidumbres entre ellos y donde, por lo menos, uno es un motor eléctrico con encoder proporcionando una mejor fiabilidad, reduciendo los costes de operación y ampliando la operatividad.
Grúa eléctrica portante para movimiento de cargas y recipientes contenedores de cogida vertical y vaciado sin volteo.
(28/03/2018). Solicitante/s: PÉREZ VERA, Aquilino. Inventor/es: PÉREZ VERA,Aquilino.
Grúa eléctrica portante para movimiento de cargas y recipientes contenedores de cogida vertical y vaciado sin volteo, para su integración en el conjunto del vehículo, alimentada por generador síncrono a 400 voltios, gestionada por un autómata programable compatible e integrado con el resto del equipo carrozado, que da servicio a los motores y actuadores de extensión y retracción de los tramos de la grúa y del dispositivo de maniobra automatizada del contenedor. Así, el referido dispositivo de maniobra integra tres mecanismos, que se accionan en 4 ejes verticales, dispuestos paralelos y coplanarios, controlados por PLC operando de forma independiente, sin servidumbres entre ellos y donde, por lo menos, uno es un motor eléctrico con encoder proporcionando una mejor fiabilidad, reduciendo los costes de operación y ampliando la operatividad.
PDF original: ES-2661290_A1.pdf
(20/07/2016) Instalación de procesamiento de alimentos con un sistema de limpieza dotado de una vía de guía que discurre a lo largo del contorno exterior de la instalación a limpiar y un brazo de robot trasladable a lo largo de la vía de guía , en el cual está montada al menos una boquilla para descargar un agente de limpieza sobre la instalación y el cual presenta al menos dos grados de libertad para el movimiento de la boquilla, caracterizada por que la vía de guía está montada por encima de la instalación a limpiar y el brazo de robot va guiado colgando de la vía de guía , por que el brazo de robot está formado por dos alas , extendiéndose una primera ala desde…
BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO.
(26/05/2016) Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico accionado por un tercer cilindro…
Dispositivo de inspección de manipulación.
(18/05/2016) Un dispositivo de inspección de manipulación comprendiendo un soporte principal, al cual se conecta un mástil telescópico, mientras que el soporte principal está adaptado para conexión repetida con una vasija a presión de reactor, en el que el soporte principal comprende una parte central y al menos tres patas de soporte conectables a él, estando dispuestas las patas de soporte sustancialmente por igual alrededor de la circunferencia de la parte central y adaptadas para conexión repetible con una vasija a presión de reactor, caracterizado por que la parte central del soporte principal está provista con una placa giratoria que tiene un orificio en su centro así como con una unidad para girar el mástil telescópico,…
Brazo articulado telescópico robotizado.
(23/01/2015) Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico…
Dispositivo de manipulación de herramientas para máquinas herramientas.
(31/12/2014) Dispositivo de manipulación de herramientas para máquinas herramientas con
- un almacén de herramientas , que presenta una posición de transferencia para las herramientas,
- un cambiador de herramientas móvil entre la posición de transferencia y una posición de sustitución, que presenta unas pinzas dobles giratorias , y
- una construcción de soporte desplazable sobre una base , sobre la que está montado el cambiador de herramientas ,
- en el que la construcción de soporte presenta dos carros colocados superpuestos y desplazables en el mismo sentido,
- en el que sobre cada uno e los dos carros está montado, respectivamente, un mecanismo…
Dispositivo de transporte.
(17/12/2014) Dispositivo de transporte para piezas de trabajo , en particular piezas de chapa, entre depósitos o dispositivos de procesamiento contiguos, en particular prensas, en que el dispositivo de transporte incluye un robot multiaxial con una herramienta asidora , en que el dispositivo de transporte incluye un dispositivo de transferencia controlable, guiado por el robot , con un dispositivo de avance y con un dispositivo de basculación para la herramienta asidora , en que el dispositivo de transferencia incluye un portaherramientas , que puede ser movido por traslación y rotación por el dispositivo de avance y el dispositivo de basculación con relación a la…
Dispositivo de asistencia para portar al menos una herramienta de lijado y/o de pulido.
(06/08/2014) Dispositivo de asistencia para el manejo de al menos una herramienta de lijado y/o de pulido que comprende:
- un bastidor de base ;
- al menos un subconjunto de soporte montado sobre dicho bastidor de tal forma que sea móvil en tres direcciones ortogonales entre sí, estando dicho subconjunto de soporte destinado a soportar una herramienta de lijado , comprendiendo dicho subconjunto de soporte:
- un brazo diseñado para portar dicha herramienta;
- unos medios de accionamiento diseñados para desplazar el brazo sobre dicho bastidor en las tres direcciones;
- unos medios de control de la presión que la herramienta de lijado aplica sobre una superficie de lijado, controlando dichos medios de control los medios de accionamiento, de tal forma que la herramienta ejerza una presión predeterminada…
Árbol telescópico para un robot industrial de acuerdo con el concepto delta.
(16/05/2012) Un árbol telescópico para uso en un robot de acuerdo con el concepto delta, teniendo el árboltelescópico extremos opuestos para conectarlos a una sección de base y a una placa móvil de dichorobot, cuando el árbol telescópico está montado en el robot, comprendiendo el árbol telescópico un brazo tubularexterior que lleva una primera unión de extremo y un brazo interior coaxial deslizable dentro del brazotubular exterior y que lleva una segunda unión de extremo , estando dicho árbol telescópico adaptado paratransmitir un par torsor de uno a otro de dicho brazo interior y brazo exterior, y en el que
- dicho brazo tubular exterior tiene una sección transversal poligonal;
-…
ROBOT TELECOMANDADO PARA OPERACIONES ESPECIALES.
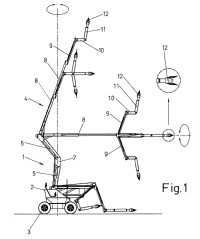
(29/03/2012). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Inventor/es: SALLEN ROSELLO,CESAR, TORRES PUEO,ROBERTO.
Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia,de forma que el robot incorpora sobre el tren de rodadura una torreta , giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria , pudiendo utilizarse para la vigilancia de puntos estratégicos,así como de zonas fronterizas, e incluso, actuar como medio disuasorio al ser portador de, al menos, un arma defensiva intimidatoria.
ROBOT INDUSTRIAL SEGUN EL CONCEPTO DELTA CON UN EJE TELESCOPICO ROTATIVO.
(16/04/2006). Ver ilustración. Solicitante/s: ABB AB. Inventor/es: PERSSON, FREDRIK, MIKAELSSON, PIERRE, HVITTFELDT, H KAN, LARSSON, JAN.
Robot industrial según el concepto delta con un sistema de brazo destinado a girar en el espacio, incluyendo una sección de base , una placa móvil , varias varillas de tracción de articulaciones múltiples y un eje telescópico dispuesto entre la sección de base y la placa móvil, donde extremos opuestos de las varillas de tracción y el eje telescópico están conectados con la sección de base y la placa móvil respectivamente, y donde el eje telescópico incluye un eje interior y un tubo externo dispuesto en el eje interior y desplazable con relación al eje interior en una dirección longitudinal, caracterizado porque un casquillo torsional rígido está dispuesto de forma estacionaria en el tubo exterior en el que el eje interior está montado de manera que se pueda desplazar.
(01/10/2001). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: AMAT GIRBAU,JOSEP, IBAÑEZ BORAU,JOSE MIGUEL.
El brazo robot retráctil preconizado está constituido por tres elementos, que consiguen con su desplazamiento axial un dispositivo retráctil que se caracteriza según es el primer objeto de la invención por la elevada relación existente entre su longitud máxima y su longitud mínima, lo que minimiza el espacio ocupado, ya que mientras que en posición extendida puede considerarse que ocupa una longitud "L", en posición recogida ocupa una longitud L/3, con lo que se logra que permitiendo la misma longitud trabajante del brazo cuando el mismo se encuentra en situación extendida, cuando se recoge ocupe una longitud L/3 en vez de L/2.
DISPOSITIVO DE CARGA Y DESCARGA.
(16/12/2000). Solicitante/s: FIBRO GMBH. Inventor/es: MASSMANN, HANS-JOACHIM, WEISER, KURT.
LA INVENCION SE REFIERE A UN DISPOSITIVO DE CARGA Y DESCARGA, EN PARTICULAR DE CARGA Y DESCARGA DE PRENSAS, CON UN BRAZO SALIENTE DISPUESTO EN UN SOPORTE , EXTENDIENDOSE HORIZONTALMENTE, QUE ES MOVIL EN DIRECCION DE SU EJE (I) LONGITUDINAL ASI COMO VERTICALMENTE Y MUESTRA UN DISPOSITIVO DE AGARRE PARA LAS PARTES A SER MANEJADAS, DONDE SE GUIA DE MANERA MOVIL HORIZONTALMENTE PARA ACELERACION DEL PROCESO DE CARGA Y DESCARGA DEL BRAZO SALIENTE DE MANERA RELATIVA CON RESPECTO AL SOPORTE , Y DONDE EL DISPOSITIVO DE AGARRE ESTA DISPUESTO EN UN CARRO DE AGARRE GUIADO EN EL BRAZO SALIENTE, QUE ES MOVIL ENTRE AMBOS EXTREMOS DEL LADO FRONTAL DEL BRAZO SALIENTE.
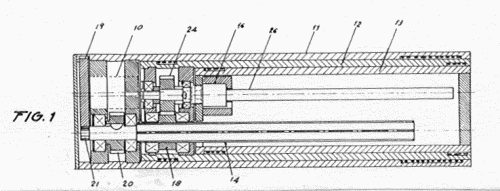
(01/10/1998). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: GARREC, PHILIPPE.
SISTEMA TELESCOPICO FORMADO CON MODULOS CUYO ELEMENTO ESENCIAL ES UN SISTEMA DE TORNILLO Y TUERCA . SEGUN LA INVENCION, UNA TRANSMISION MECANICA IMPONE ROTACIONES DE RELACION CONSTANTE Y DIFERENTE DE LA UNIDAD ENTRE EL TORNILLO Y LA TUERCA, Y POR CONSIGUIENTE UNA TRASLACION DETERMINADA DEL TORNILLO PARA UNA ROTACION DETERMINADA DE LA TUERCA. EL TORNILLO ESTA UNIDA A LA TUERCA DE LA SIGUIENTE ETAPA. EL DESPLIEGUE SIMULTANEO Y UNIFORME DE TODOS LOS MODULOS DEL SISTEMA SE CONTROLA ASI. ADEMAS, LOS TORNILLOS (56 Y 74) PUEDEN SER CONCENTRICOS Y EL SISTEMA NO ES MUY PESADO. APLICACION EN PARTICULAR EN LA ROBOTICA.
ROBOT ARTICULADO CON DOS ANTEBRAZOS.
(16/06/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
UN ROBOT ARTICULADO TIENE UN BRAZO Y DOS ANTEBRAZOS , LOS CUALES ESTAN ARTICULADOS AL BRAZO ALREDEDOR DEL MISMO EJE Y CONTROLADOS POR MEDIOS DE CONDUCCION INDEPENDIENTES.
(16/04/1994) COLGADOR, PARA LA SUSTENTACION DE DIFERENTES UNIDADES DE PESOS DISTINTOS, QUE ESENCIALMENTE SE CARACTERIZA PORQUE ESTA CONSTITUIDO POR UNA CAZOLETA, DOS BRAZOS SUSTANCIALMENTE IDENTICOS DE LADOS DESIGUALES, Y UNA ANILLA METALICA, EN QUE LA CAZOLETA PRESENTA UN VACIADO TRASERO QUE DETERMINA UN CIERTO ESPESOR DE LA MISMA Y UNA SUPERFICIE TRASERA QUE ES PLANA, EN QUE EN CADA COSTADO DE ESTE ESPESOR, SE PRACTICAN DOS PERFORACIONES INCLINADAS CON RESPECTO A LA HORIZONTAL, ESTANDO ALINEADAS LA PERFORACION SUPERIOR DE UN COSTADO CON LA INFERIOR DEL OTRO COSTADO, EN QUE EN CADA PAR DE ESTOS AGUJEROS ALINEADOS, SE ACOMODAN LOS LADOS MENORES DE LOS BRAZOS, LOS QUE SON DE SECCION TRANSVERSAL CIRCULAR, PRESENTANDO ESTOS BRAZOS SUS LADOS MAYORES QUE SOBRESALEN DE LA CAZOLETA POR LOS AGUJEROS SUPERIORES ANTEDICHOS,…
PROCEDIMIENTO PARA FABRICAR FIGURAS CON MEDIO DE FIJACION A UNA SUPERFICIE.
(16/08/1992). Ver ilustración. Solicitante/s: IMSERTEX, S.A. Inventor/es: RODRIGUEZ MONEDERO, MIGUEL.
PROCEDIMIENTO PARA FABRICAR FIGURAS CON MEDIO DE FIJACION A UNA SUPERFICIE, CUYO PROCEDIMIENTO COMPRENDE MOLDEAR EN POLIESTIRENO UNA PIEZA QUE REPRESENTA UNA FIGURA DE ANIMAL O COSA, CUYAS PIEZAS SE DISPONEN O ALMACENAN SIN PINTAR EN UNA SUPERFICIE, Y CUYAS PIEZAS SON COGIDAS POR UNOS BRAZOS ACCIONADOS HIDRAULICAMENTE QUE VAN PASANDO LAS PIEZAS POR UNOS PUNTOS EN LOS QUE LA SUPERFICIE PRESENTA UNAS ESCOTADURAS ENFRENTADAS A UNAS PISTOLAS QUE PINTAN LOS REHUNDIDOS, RESALTES Y EXTREMOS LIBRES DE LOS NERVIOS QUE DELIMITAN LOS REHUNDIDOS DE DIFERENTES COLORES, MIENTRAS QUE UN ULTIMO BRAZO COGE CADA UNA DE LAS PIEZAS TERMINADAS DE PINTAR Y LAS DEPOSITA EN EL EXTREMO OPUESTO DE LA SUPERFICIE.
DISPOSITIVO PARA UN SISTEMA DE MONTAJE DE LA TECNICA OPERATORIA, INTEGRADO POR UN ELEMENTO PORTADOR Y UNA UNIDAD DE TRINEOS.
(16/06/1992) LA INVENCION EN CUANTO A UN DISPOSITIVO CON POR LO MENOS UN ELEMENTO PORTADOR Y POR LO MENOS UNA UNIDAD DE TRINEOS DISPUESTA REGULABLE LINEAL AL MISMO PARA UN SISTEMA DE MONTAJE DE LA TECNICA OPERATORIA, CON ESTE DISPOSITIVO LA UNIDAD DE TRINEOS ESTA EN CONEXION DE EFECTO SOBRE UN ARTICULO DE ARRASTRE PARA CABLES ELECTRICO NEUMATICO O ELECTRICO HIDRAULICO CON UNA FUENTE DE ENERGIA Y DE SEÑAL. EL ELMENTO PORTADOR ESTA CONDORMADO COMO CONSTRUCCION DE CELULA Y TIENE UNA PISTA DE GUIA INTEGRADA, QUE MUESTRA CON RESPECTO A SUELOS HORIZONTALES Y PAREDES VERTICALES, UNA POSICION OBLICUA DENTRO DEL ELEMENTO PORTADOR , A TRAVES DEL CUAL SE ALCANZA UNA COLOCACION AHORRANDO ESPACIO AMPLIAMENTE PROTEGIDA CONTRA LA INTERVENCION EXTERIOR, DEL ARTICULO DE ARRASTRE PARA CABLES . LA UNIDAD DE TRINEOS ABARCA UN GRUPO DE ACCIONAMIENTO QUE ESTA DISPUESTO EN…
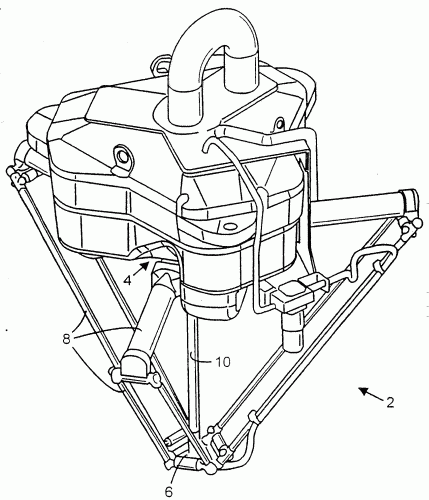
(01/07/1990) EL SOPORTE CONSISTE DE POR LO MENOS UNA VARA PERFILADA Y POR LO MENOS UNA PARED DE SOPORTE . EL SOPORTE ESTA ESTRUCTURADO PREFERENTEMENTE DE DOS VARAS PERFILADAS, LAS CUALES MARCAN DOS PUNTAS SOBRE TODO EN EL CAMPO DE LA TERCERA PUNTA, DE UN TUBO TRIANGULAR RANURADO LONGITUDINALMENTE Y LAS CUALES ESTAN UNIDAS EN ESTE EJEMPLO CON TRES PAREDES DE SOPORTE . CADA VARA PERFILADA POSEE DOS ALMAS LONGITUDINALES (P.E. 7, 8), DONDE ESTA SUJETADO UNA PUNTA DE CADA PARED DE SOPORTE O LA PARED DE SOPORTE, DONDE EL CAMPO DE TRANSICION ENTRE AMBOS ES PLANO. EN CADA VARA PERFILADA HAY POR LO MENOS UNA SUPERFICIE DE RODADURA (P.E.12, 13, 14)PUDIENDOSE TRATAR PERFECTAMENTE DE UNA SUPERFICIE PARCIAL DE LA CAMISA DE LA VARA PERFILADA NO SEPARADA CORPORALMENTE. PLANOS CENTRALES LONGITUDINALES IMAGINARIOS DE ALMAS LONGITUDINALES (P.E. 7, 8) SE CRUZAN EN UN EJE LONGITUDINAL…
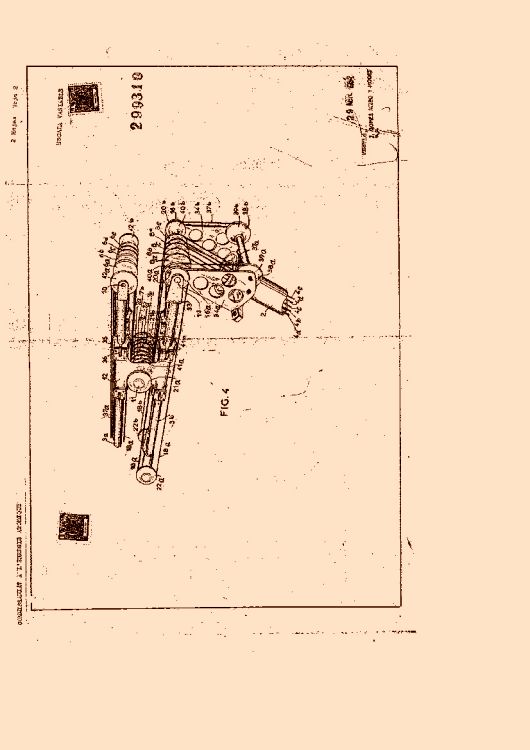
PERFECCIONAMIENTOS EN LOS DISPOSITIVOS DE ARTICULACIÓN CON TRANSMISIÓN DE MOVIMIENTOS.
(01/07/1964). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}