CIP-2021 : B25J 13/00 : Controles para manipuladores (controles por programa B25J 9/16).
CIP-2021 › B › B25 › B25J › B25J 13/00[m] › Controles para manipuladores (controles por programa B25J 9/16).
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 13/02 · Medios de control por aprehensión manual.
B25J 13/04 · Medios de control por el pie.
B25J 13/06 · Puestos de control, p. ej. pupitres, cuadros de mando.
B25J 13/08 · por medio de dispositivos sensores, p. ej. a la visión o al tacto.
CIP2021: Invenciones publicadas en esta sección.
Robot autónomo de limpieza de superficies.
(16/05/2019) Un robot móvil de limpieza de suelos que comprende:
un cuerpo de robot que define una dirección (F) de accionamiento hacia delante;
un sistema de accionamiento que soporta el cuerpo de robot para maniobrar el robot a través de una superficie , comprendiendo el sistema de accionamiento ruedas de accionamiento derecha e izquierda (124a, 124b) dispuestas en las partes derecha e izquierda correspondientes del cuerpo de robot; y
un conjunto de limpieza dispuesto sobre el cuerpo de robot, comprendiendo el conjunto de limpieza:
un soporte de almohadilla dispuesto delante de las ruedas motrices (124a, 124b) y que tiene…
Cobertura multimodal para un robot autónomo.
(16/05/2019) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
en el que dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen un comportamiento de cobertura en el que el sistema de control alterna cíclicamente entre…
SISTEMA DE ENTRETENIMIENTO QUE INCLUYE UN APARATO SEXUAL EL CUAL SE PUEDE CONTROLAR VÍA REMOTA MEDIANTE UN DISPOSITIVO CON ACCESO A INTERNET.
(07/02/2019). Solicitante/s: ZAMORANO SILVA, Alvaro Antonio. Inventor/es: ZAMORANO SILVA,Alvaro Antonio.
Se describe e ilustra un sistema de entretenimiento para adultos en el cual se pueden transmitir, de manera remota y unidireccionalmente, señales de control, mediante un dispositivo móvil de un usuario denominado suscriptor, a un dispositivo móvil el cual a su vez retransmite las señales de control a un aparato sexual utilizados por un usuario denominado proveedor durante el transcurso de una videollamada la cual es gestionada por un servidor de datos al tiempo que se transmiten señales de audio y/o video desde el dispositivo móvil del proveedor al dispositivo móvil del suscriptor vía un servidor de streaming.
Instrumentos quirúrgicos articulados y métodos para desplegar los mismos.
(11/04/2018). Solicitante/s: Medrobotics Corporation. Inventor/es: FLAHERTY, J., CHRISTOPHER, OYOLA,ARNOLD, CASTRO,MICHAEL SALVATORE.
Una herramienta quirúrgica que comprende:
un primer conjunto alargado que comprende una región de articulación ; y
un segundo conjunto alargado que comprende:
un elemento de soporte alargado ;
un elemento de activación alargado móvil con respecto al elemento de soporte; y
un mecanismo funcional acoplado al elemento de activación, siendo un movimiento del mecanismo funcional en respuesta a un movimiento del elemento de activación, donde una fuerza impartida por el movimiento del elemento de activación se aísla del primer conjunto por el elemento de soporte, caracterizado por que el segundo conjunto comprende, además, una horquilla acoplada al elemento de soporte y donde la herramienta quirúrgica comprende, además, una holgura longitudinal entre la horquilla y un extremo distal del primer conjunto, donde el segundo conjunto está en comunicación con el primer conjunto de manera que el elemento de soporte pueda moverse con respecto al primer conjunto.
PDF original: ES-2668307_T3.pdf
Método y sistema de cobertura multicódigo para un robot autónomo.
(10/01/2018) Un robot móvil que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos , un sensor de seguimiento de obstáculos , un detector de precipicios y un sensor de caída de rueda que es capaz de detectar si una o más ruedas no están soportadas por la superficie;
(c) y un sistema de control conectado con capacidad de funcionamiento a dicho sensor de detección de obstáculos y dichos medios de movimiento;
(d) configurado dicho sistema de control para hacer funcionar el robot en varios modos, comprendiendo dichos varios modos:
un modo de seguimiento de obstáculos mediante el cual dicho robot se desplaza adyacente a un obstáculo, en donde el sensor de seguimiento de…
GUANTE HÁPTICO DE REALIDAD VIRTUAL CON SISTEMAS PARA LA SIMULACIÓN DE SENSACIONES DE PRESION, TEXTURA Y TEMPERATURA.
(27/07/2017). Solicitante/s: TZOMPA SOSA, Alyed Yshidoro. Inventor/es: SALAZAR AMADOR,María Del Rubí, PACHECO GARCÍA,Prudencio Fidel.
Un guante háptico que permite la interacción con elementos de un entorno virtual y además, la simulación de estímulos sensoriales de contacto y temperatura de forma rápida, controlada y segura.
Procedimiento para manejar un robot industrial.
(24/08/2016) Procedimiento para manejar un robot industrial por medio de un aparato de mando que presenta una interfaz de usuario gráfica con pantalla táctil , que comprende las etapas de procedimiento de:
- visualizar sobre la pantalla táctil al menos un elemento de mando virtual que representa una función o modo de funcionamiento del robot industrial ,
- seleccionar una función o modo de funcionamiento deseado activando el al menos un elemento de mando virtual por parte de un usuario,
- detectar que se ha activado el al menos un elemento de mando virtual y enviar una señal de control correspondiente a la función o al modo de funcionamiento seleccionado a un control de seguridad ,
- evaluar la señal de control en el control de seguridad…
Procedimiento y sistema de cobertura plurimodal para un robot autónomo.
(10/08/2016) Un robot móvil, que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
teniendo dicho sistema de control un comportamiento de cobertura, en el que el sistema de control alterna en un ciclo entre un modo de seguimiento de obstáculos, en el que el robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, en el que el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
caracterizado por que el sistema de control está configurado de modo que haga funcionar el robot en una pluralidad de comportamientos que incluyen…
Cabezal de herramienta para realizar operaciones industriales que tiene un sistema de monitoreo inalámbrico.
(10/08/2016) Un sistema de realización de operaciones industriales, que comprende:
- al menos un cabezal (H) de herramienta provisto de una herramienta ;
- al menos un sensor (S) asociado a dicho cabezal (H) de herramienta y configurado para detectar un parámetro operativo del cabezal (H) de herramienta;
- una unidad (M) de control para controlar la operación de dicho cabezal (H) de herramienta,
- un módulo (E) de control montado sobre dicho cabezal (H) de herramienta y que incluye:
- una unidad (A) de adquisición de datos conectada a dicho al menos un sensor (S) y configurada para adquirir datos procedentes de al menos un sensor (S); y
- una unidad (T) de transmisión inalámbrica conectada…
(10/08/2016) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento; en el que
dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, mediante el cual el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen…
Un manipulador neumático equilibrado.
(04/01/2016) Un manipulador neumático equilibrado, que incluye:
- un dispositivo de soporte que incluye un grupo giratorio alrededor de un eje vertical (z);
- un mecanismo de paralelogramo articulado que incluye un brazo oscilante montado a pivote en el grupo para girar alrededor de un eje de oscilación horizontal (x);
- al menos un accionador lineal neumático , que actúa entre el grupo giratorio y el mecanismo de paralelogramo articulado , para hacer que el brazo gire alrededor del eje de oscilación (x);
caracterizado porque el manipulador además comprende:
- una corredera conectada al accionador y montada de manera deslizable en el grupo giratorio por medio de primeros medios de guía rectilíneos extendidos en una primera dirección dada (c);
- segundos medios de guía rectilíneos…
Procedimiento y sistema de guiado para la recolección automática de producto hortícola basado en modelado digital 3D.
(10/07/2015) Procedimiento y sistema de guiado para la recolección automática de producto hortícola basado en modelado digital 3D.
La invención consiste en un procedimiento para la selección de productos hortofrutícola que comprende la creación de un modelo 3D así como un sistema para el guiado de un manipulador robótico para la recolección de productos hortícolas que lleva a cabo dicho procedimiento de selección.
Brazo robótico montable en aguilón.
(05/11/2014) Un brazo robótico montable en aguilón para soportar temporalmente un conductor alargado , que comprende:
un miembro rígido adaptado para montarse sobre el extremo superior de un aguilón , al menos un poste de soporte eléctricamente aislado montado en el citado miembro rígido , siendo cada poste de dicho al menos un poste de soporte eléctricamente aislado para soportar temporalmente un conductor eléctrico alargado ,
al menos dos medios de rotación para la rotación selectivamente controlable de dicho miembro rígido y dicho al menos un poste de soporte eléctricamente aislado alrededor de al menos…
Cobertura multimodo para un robot autónomo.
(06/08/2014) Un robot móvil , que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos ;
(c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos y a dichos medios de movimiento;
(d) estando configurado dicho sistema de control para hacer funcionar el robot en una pluralidad de modos, comprendiendo dicha pluralidad de modos: un modo de seguimiento de obstáculo mediante el cual dicho robot se desplaza de manera adyacente a un obstáculo, y un modo de rebote mediante el cual el robot se desplaza sustancialmente en una dirección alejándose de un obstáculo después de encontrarse un obstáculo,
caracterizado por que el robot móvil comprende además
sensores de desnivel que impiden que el robot móvil…
Método y aparato para control háptico.
(23/10/2013) Un método de simulación de movimiento, comprendiendo el método las etapas de:
proporcionar al menos seis grados de libertad de movimiento a un usuario asociando de forma operativa un brazorobot antropomórfico con un receptáculo del usuario para alojar todo el cuerpo del usuario, en el que elbrazo robot está adaptado para situar el receptáculo del usuario en cualquier lugar en el plano X, Y y Z deun sistema de coordenadas cartesianas con cualquier orientación;
proporcionar retroalimentación háptica al usuario en correspondencia con el movimiento del receptáculo del usuario además de la sensación háptica en todo el cuerpo proporcionada por el brazo robot en solitario.
DISPOSITIVO ELECTRONICO REDUCTOR DE ESFUERZOS PARA MANIPULADORES INGRAVIDOS A ACCIONADOS POR AIRE COMPRIMIDO.
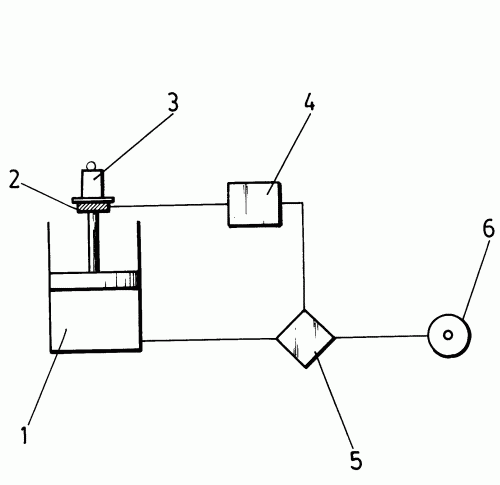
(16/09/1994). Ver ilustración. Solicitante/s: MANIPULACION ASISTIDA, S.A. Inventor/es: BILBAO ARGUESO, JULIAN.
DISPOSITIVO ELECTRONICO REDUCTOR DE ESFUERZOS PARA MANIPULADORES INGRAVIDOS ACCIONADOS POR AIRE COMPRIMIDO, ESTANDO CONSTITUIDOS ESTOS MANIPULADORES BASICAMENTE MEDIANTE UN CILINDRO EQUILIBRADOR QUE CONECTA POR UN EXTREMO CON LA CARGA O SISTEMA DE SUSPENSION DE LA CARGA Y POR SU OTRO EXTREMO CON LA CORRESPONDIENTE RED DE ALIMENTACION DE AIRE COMPRIMIDO ; CARACTERIZADO ESENCIALMENTE DICHO DISPOSITIVO ELECTRONICO PORQUE CUENTA CON UN TRANSDUCTOR O CELULA DE CARGA QUE SE INTERCALA ENTRE EL CILINDRO EQUILIBRADOR Y LA CARGA O SU SISTEMA DE SUSPENSION , CONECTANDOSE ELECTRICAMENTE DICHA CELULA A UN AMPLIFICADOR E INVERSOR DE SEÑAL QUE A SU VEZ CONECTA CON UNA VALVULA PROPORCIONAL INTERCALADA ENTRE LA RED DE ALIMENTACION DE AIRE COMPRIMIDO Y EL CILINDRO EQUILIBRADOR ; TODO ELLO EN ORDEN A QUE DICHA ALIMENTACION DE AIRE QUEDE REGULADA EN FUNCION DE LAS FUERZAS DETECTADAS POR LA CELULA DE CARGA.
MANIPULADOR MECANICO DE EJES MULTIPLES CON CARRERA REGULABLE Y PROTECCION CONTRA SOBRECARGAS.
(16/08/1990). Ver ilustración. Solicitante/s: SOCIETE S.O.P.A.P. SA. Inventor/es: FREYWISS, ERIC.
MANIPULADOR MECANICO DE EJES MULTIPLES CON CARRERA REGULABLE Y PROTECCION CONTRA SOBRECARGAS. EL MOVIMIENTO ES TRANSMITIDO L MECANISMO DE POSICIONAMIENTO POR LA COMBINACION DE UN MOTOR-FRENO , DE UN REDUCTOR DE RUEDA Y TORNILLO SIN FIN Y DE UN LIMITADOR DE PAR AJUSTABLE . SE DETERMINA LA LEY DE MOVIMIENTO DEL MECANISMO DE POSICIONAMIENTO PARA OBTENER UNA VELOCIDAD CONSTANTE EN UNA AMPLIA BANDA, CON PUNTOS DE PARADA EVENTUALES. LA CONEXION DEL BASTIDOR GIRATORIO CON EL MECANISMO DE POSICIONAMIENTO SE OBTIENE POR MEDIO DE UN CAJETIN DE MUELLES . EL MOVIMIENTO ES TRANSMITIDO A LA LEVA CILINDRICA POR MEDIO DE UN LIMITADOR DE PAR AJUSTABLE . EL DESPLAZAMIENTO DEL BRAZO MANIPULADOR SE EFECTUA POR MEDIO DE UNA PLETINA PROVISTA DE MUELLES QUE PERMITE UN RETROCESO ANGULAR MOMENTANEO DEL BRAZO CUANDO SE ENCUENTRA CON UN OBSTACULO. EL MANIPULADOR TIENE APLICACION EN LA MANUTENCION DE CARGAS DE PIEZAS.
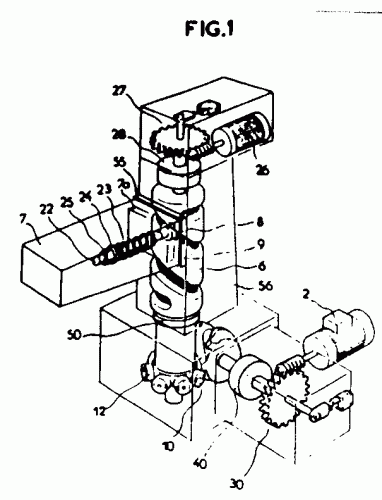
DISPOSITIVO DE ACCIONAMIENTO BASCULANTE PARA, AL MENOS, UN EJE PRINCIPAL DE MANIPULADORES DE HERRAMIENTAS Y EQUIPOS DE SOLDADURA, MONTAJE, ARRANQUE DE VIRUTAS Y ROCIADO.
(16/02/1985). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH.
DISPOSITIVO DE ACCIONAMIENTO DE BASCULACION DE UN MANIPULADOR.COMPRENDE UN MECANISMO DE DESMULTIPLICACION DE VARIOS PASOS O ESCALONES CON UN ENGRANAJE DE RUEDAS DE ACERO COMO ULTIMO PASO Y CON TRANSMISIONES DE CORREA DENTADA (24, 25, 26 Y 31, 32, 33) EXENTAS DE HOLGURA EN LOS PASOS RESTANTES. LA TENSION POR TORSION SE CONSIGUE SUBDIVIDIENDO LA RUEDA DE ACCIONAMIENTO DEL ENGRANAJE DE RUEDAS DE ACERO EN DOS MEDIOS PIN/ONES QUE, MEDIANTE UN ARBOL ELASTICO A LA TORSION Y UN CASQUILLO ELASTICO A LA TORSION DE IGUAL ELASTICIDAD AL GIRO, ESTAN MUTUAMENTE TENSADOS Y UNIDOS CON CIERRE DE TORSION CON LA RUEDA DE SALIDA DEL PASO PRECEDENTE DEL MECANISMO.
UN APARATO PARA CONTROLAR LOS MOVIMIENTOS Y LAS POSICIONES DE TRABAJO DE UN ROBOT INDUSTRIAL.
(16/11/1983). Solicitante/s: KABUSHIKI KAISHA SANKYO SEIKI SEISAKUSHO.
APARATO DE CONTROL DE ROBOT INDUSTRIAL.CONTROLA EL MOVIMIENTO DE UN BRAZO DE ROBOT CON RESPECTO A UNA PIEZA TRANSPORTADA EN UNA BANDEJA QUE DESCIENDE POR UNA CADENA DE PRODUCCION, EN EL QUE LA POSICION DEL BRAZO DEL ROBOT SE COMPENSA SEGUN LA POSICION DE LA PIEZA. UNA MEMORIA DE POSICION DE REFERENCIA MEMORIZA DICHA POSICION DE LA BANDEJA O PIEZA. UN DETECTOR DE POSICION INDICA LA POSICION EN QUE SE SUJETA LA BANDEJA O PIEZA A LO LARGO DE LA CADENA DE MONTAJE. SE UTILIZA LA DIFERENCIA ENTRE LAS SALIDAS DE LA MEMORIA DE POSICION DE REFERENCIAY EL DETECTOR DE POSICION PARA CORREGIR UN VALOR MEMORIZADO EN UNA MEMORIA DE POSICION DE TRABAJO PARA FACILITAR ASI LOS DATOS DE SALIDA QUE CONTROLAN EL MOVIMIENTO DEL BRAZO DEL ROBOT.
DISPOSICION DE TRANSMISION PARA UNA CABEZA ARTICULADA UNIDA CON EL BRAZO DE UN MANIPULADOR DE HERRAMIENTAS Y EQUIPOS DE SOLDADURA, MONTAJE, ARRANQUE DE VIRUTAS Y ROCIADO.
(01/03/1983). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH.
DISPOSICION DE TRANSMISION PARA UNA CABEZA ARTICULADA UNIDA CON EL BRAZO DE UN MANIPULADOR DE HERRAMIENTAS. CONSTA DE UNA CAJA DE BASE QUE ES GIRATORIA EN TORNO AL EJE LONGITUDINAL DEL BRAZO; DE UNA CAJA DE ARTICULACION APOYADA DE MANERA BASCULABLE EN TORNO A UN EJE TRANSVERSAL AL EJE LONGITUDINAL; DE UN CUERPO DE SOPORTE APOYADO, EN LA CAJA DE ARTICULACION, TRANSVERSALMENTE A SU EJE DE ARTICULACION, SIENDO DICHO CUERPO DE SOPORTE EL QUE RECIBE LA HERRAMIENTA; Y DE ARBOLES DE ACCIONAMIENTO QUE SE EXTIENDEN COAXIALMENTE RESPECTO AL EJE LONGITUDINAL DEL BRAZO Y QUE ACCIONAN LA CAJA DE BASE , LA CAJA DE ARTICULACION Y EL CUERPO DE SOPORTE.
{kind=link}
{kind=link}