Pilotaje automatizado de un conjunto de grúas.
Procedimiento de pilotaje automatizado (S) de un conjunto (1) de grúas (2,
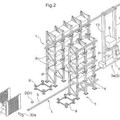
3, 4) torre, comprendiendo cada grúa (2, 3, 4) torre un conjunto (1) móvil angularmente que comprende una pluma (11), comprendiendo el procedimiento las etapas siguientes:
- determinar (S1) un estado de funcionamiento instantáneo de cada grúa (2, 3, 4), estando cada grúa (2, 3, 4) o bien en veleta, o bien en funcionamiento, o bien en pilotaje automatizado,
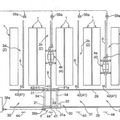
- determinar (S2) una configuración de destino de la grúa en pilotaje automatizado, correspondiendo dicha configuración de destino a una configuración espacial en la que el conjunto móvil de dicha grúa se extiende según una dirección que corresponde lo máximo posible a una dirección (V) del viento, limitando los riesgos de molestias a las otras grúas del conjunto (1) de grúas, y
- desplazar (S7) angularmente la grúa (2) en pilotaje automatizado hacia su configuración de destino así determinada, comprendiendo además el procedimiento las etapas siguientes de optimización de la trayectoria entre una configuración inicial y una configuración final, correspondiendo la configuración inicial a la configuración espacial instantánea de la grúa en pilotaje automatizado y correspondiendo la configuración final a la configuración de destino:
- determinar (S3) si, partiendo de su configuración espacial inicial, la grúa en pilotaje automatizado es capaz de alcanzar la configuración final, sea cual sea su sentido de rotación (A, B),
- si la grúa en pilotaje automatizado es capaz de alcanzar la configuración final desde su configuración inicial, sea cual sea su sentido de rotación (A, B), determinar (S4) las lentes de interferencia de esta grúa en pilotaje automatizado con las otras grúas del conjunto de grúas e identificar el sentido de rotación (A, B) de la grúa en pilotaje automatizado en el que dicha grúa corta la menor cantidad de lentes de interferencias,
- deducir (S6) de ello el sentido de rotación (A, B) en el que la grúa (2) en pilotaje automatizado debe ser desplazada angularmente para alcanzar la configuración final.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E18211092.
Solicitante: Bouygues Construction Materiel.
Nacionalidad solicitante: Francia.
Dirección: 27, boulevard Gabriel Péri 76410 Tourville-la-Riviere FRANCIA.
Inventor/es: SAILLY,RAYMOND, CHADIRAC,STÉPHANE, BOURGEOIS,SAMY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C15/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 15/00 Mecanismos de seguridad (para mecanismo de enrollamiento de cuerdas, cables o de cadenas B66D 1/54). › para impedir las colisiones, p. ej. entre las grúas, o los carros que trabajan sobre la misma vía.
PDF original: ES-2816524_T3.pdf
Patentes similares o relacionadas:
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Dispositivo de ayuda al funcionamiento de una grúa, del 27 de Julio de 2016, de Toshiba Mitsubishi-Electric Industrial Systems Corporation: Sistema de ayuda al funcionamiento de una grúa para ayudar al funcionamiento de una grúa que incluye un cuerpo móvil capaz de izar un contenedor […]
Carro elevador de pórtico para la utilización en terminales de contenedores y para propósitos de transporte generales, y proceso para dirigir el mismo, del 15 de Noviembre de 2013, de Pfenning Elektroanlagen GmbH: Carro elevador de pórtico para la utilización en terminales de contenedores y para propósitos de transportegenerales, con un volante , un pedal […]
Método de seguridad y de control para grúas, del 1 de Marzo de 2013, de LIEBHERR-WERK NENZING GMBH: Procedimiento de seguridad para levantar yo transportar una carga común con una pluralidad de grúas que tienelos pasos: - determinar posibles incidentes […]
 Sistema de desplazamiento para cuerpos móviles y método de control correspondiente, del 13 de Junio de 2012, de DAIFUKU CO., LTD.: Un sistema de desplazamiento para cuerpos móviles, que comprende:
una trayectoria (L) de desplazamiento que se extiende entre un primer extremo (L1) de la trayectoria […]
Sistema de desplazamiento para cuerpos móviles y método de control correspondiente, del 13 de Junio de 2012, de DAIFUKU CO., LTD.: Un sistema de desplazamiento para cuerpos móviles, que comprende:
una trayectoria (L) de desplazamiento que se extiende entre un primer extremo (L1) de la trayectoria […]
SISTEMA ANTICOLESION DE GRUAS., del 16 de Octubre de 2004, de ANGEL IGLESIAS, S.A.: Sistema anticolisión de grúas, de las que constan de torre, brazo con flecha y contraflecha, carro y gancho, en el que para cada obra de construcción y por […]
INDICADOR DE POSICIÓN DE PLUMA PARA GRÚA, del 13 de Julio de 2011, de MANITOWOC CRANE GROUP FRANCE: Indicador de la posición en el espacio, es decir de la orientación de la pluma de una grúa, especialmente de una grúa de torre o de una grúa de pluma […]
 METODO DE AJUSTE DE INFORMACION DE DISTANCIAS PARA UNA INSTALACION DE TRANSPORTE DE ARTICULOS CON OPERACION DE APRENDIZAJE, del 2 de Marzo de 2010, de DAIFUKU CO., LTD.: Método de ajuste de información de distancias para una instalación de transporte de artículos con operación de aprendizaje, comprendiendo dicha instalación una pluralidad […]
METODO DE AJUSTE DE INFORMACION DE DISTANCIAS PARA UNA INSTALACION DE TRANSPORTE DE ARTICULOS CON OPERACION DE APRENDIZAJE, del 2 de Marzo de 2010, de DAIFUKU CO., LTD.: Método de ajuste de información de distancias para una instalación de transporte de artículos con operación de aprendizaje, comprendiendo dicha instalación una pluralidad […]