PODADOR POR CONTROL REMOTO.
1. Podador por control remoto, caracterizado esencialmente, porque está formado por un vehículo (1) equipado con orugas (1.
2), tiene una pinza (2) sobre la que opera el podador (3), y tiene un control remoto (5) desde el que se pueden controlar todos los componentes.
2. Podador por control remoto, según la reivindicación anterior, caracterizado esencialmente, porque el vehículo (1), guiado por el control remoto (5) tiene un compartimento (1.1) que tiene orugas (1.2) para el desplazamiento todo terreno, y tiene el enganche rápido para la sujeción de la pinza (2) con el podador (3).
3. Podador por control remoto, según reivindicaciones 1 y 2, caracterizado esencialmente, porque el compartimento (1.1) contiene: Las baterías, el motor principal, el compresor, el sistema de aire comprimido, el control funcional (1.3), y los mandos locales (1.4).
4. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque las baterías son recargables, alimentan: Al control funcional, a los mandos locales (1.4), al motor principal, al compresor, a la pinza (2), y al podador (3).
5. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque el motor principal, aporta la fuerza motriz a las orugas (1.2) para posibilitar el movimiento del vehículo (1).
6. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque el compresor, alimenta al sistema de aire comprimido que dispone de los componentes necesarios para posibilitar la distribución del aire comprimido hasta los cilindros neumáticos.
7. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque el control funcional, controla y opera todos los componentes del vehículo (1) de la pinza (2) y del podador (3), en función de las órdenes que recibe desde el control remoto (5).
8. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque mandos locales (1.4), pueden accionar todas las maniobras de forma local desde el propio vehículo (1).
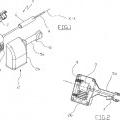
9. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque el vehículo (1) tiene un primer enganche rápido, compatible con el segundo enganche rápido de la pinza (2), de forma que ambos se pueden acoplar y desacoplar para que el vehículo (1) pueda llevar la pinza (2) con el podador (3).
10. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque la pinza (2): Está formada por una estructura abisagrada (2.1) con forma de anillo con cierres (2.4), por un primer cilindro neumático para la apertura y cierre de la pinza (2), por unas orugas motrices (2.2) que se adaptan al tronco del árbol mediante los segundos cilindros neumáticos, por los motores motrices, por el segundo enganche rápido, y por un raíl (2.3).
11. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque tiene la pinza (2), mediante el accionamiento del primer cilindro neumático se abre y se cierra abarcando al tronco del árbol, el cierre queda estabilizado mediante los cierres (2.4) con la pinza (2) cerrada las orugas motrices (2.2) distribuidas perimetralmente desplazan a la pinza (2) en sentido ascendente y descendente por el tronco del árbol.
12. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque tiene la pinza (2) dispone de un rail (2.3) sobre el que se desplaza el podador (3).
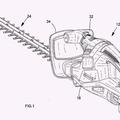
13. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque tiene el podador (3), incorpora una motosierra (3.1) y tiene un sistema motriz que le permite desplazarse sobre el rail (2.3) y acercarse o alejarse del tronco del árbol mediante un tercer cilindro neumático.
14. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque la motosierra (3.1) va montada sobre la estructura (3.2) mediante un perno (3.3) que le permite pivotar por la acción de un cuarto cilindro neumático (3.4), la espada de la motosierra (3.1) dispone de todos los grados de libertad necesarios para podar las ramas que va encontrando en su recorrido.
15. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque tiene la motosierra (3.1) tiene un escudo protector entre ella y el tronco del árbol.
16. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque la pinza (2) y el podador (3) permanecen unidos con el vehículo (1) mediante mangueras (4) por las que desde el vehículo (1) se transmite a la pinza (2) y al podador (3), el control, la energía eléctrica y el aire comprimido, necesarios para su funcionamiento.
17. Podador por control remoto, según reivindicaciones anteriores, caracterizado esencialmente, porque el control remoto (5), permite operar a distancia el vehículo (1), la pinza (2) y el podador (3).
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201930585.
Solicitante: DOMINGO PARADELA, Jose Domingo.
Nacionalidad solicitante: España.
Inventor/es: DOMINGO PARADELA,Jose Domingo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01G3/053 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01G HORTICULTURA; CULTIVO DE HORTALIZAS, FLORES, ARROZ, FRUTOS, VID, LÚPULO O ALGAS; SILVICULTURA; RIEGO (recolección de frutas, verduras, lúpulo o productos similares A01D 46/00; crecimiento de algas unicelulares C12N 1/12). › A01G 3/00 Instrumentos de corte especialmente adaptados para la horticultura; Desramado de árboles en pie (desramadoras A01G 23/095). › accionados por motor.
PDF original: ES-1231684_U.pdf
Patentes similares o relacionadas:
MAQUINA PARA PELAR O RECORTAR PLANTAS, del 11 de Marzo de 2019, de DANUT FLORIN, Bidirel: 1. Máquina para pelar o recortar plantas caracterizada porque presenta una forma general aproximada a la de una plancha contando con una carcasa que comprende una base […]
Dispositivo de sujeción de una cuchilla de corte pivotante, del 6 de Marzo de 2019, de PELLENC: Dispositivo de sujeción de una cuchilla de corte con leva , que comprende un pivote de cuchilla para el montaje pivotante de la […]
CABEZAL DE CORTE Y TRITURACIÓN DE VARETAS DEL OLIVAR, del 21 de Junio de 2018, de JIMÉNEZ LAREDO, José Antonio: Cabezal de corte y trituración de varetas del olivar que comprende dos tambores de cuchillas paralelos que giran dentro de un protector , movidos por sus ejes […]
CABEZAL DE CORTE Y TRITURACIÓN DE VARETAS DEL OLIVAR, del 18 de Junio de 2018, de JIMÉNEZ LAREDO, José Antonio: Cabezal de corte y trituración de varetas del olivar que comprende dos tambores de cuchillas paralelos que giran dentro de un protector […]
MÁQUINA AUTÓNOMA PODADORA DE PALMERAS, del 31 de Mayo de 2017, de PELLISA PELLISA, Gaietà: 1. Máquina autónoma podadora de palmeras, caracterizada por comprender una carcasa cilíndrica y desmontable, apta para ser acoplada alrededor del tronco de la palmera […]
 Dispositivo de corte de vegetación, del 17 de Febrero de 2016, de BLACK & DECKER INC.: Un dispositivo de corte de vegetación que comprende:
una carcasa ,
un motor ubicado en el interior de la carcasa, comprendiendo el motor un eje […]
Dispositivo de corte de vegetación, del 17 de Febrero de 2016, de BLACK & DECKER INC.: Un dispositivo de corte de vegetación que comprende:
una carcasa ,
un motor ubicado en el interior de la carcasa, comprendiendo el motor un eje […]
 Dispositivo motorizado portátil para herramientas de jardinería, del 1 de Diciembre de 2015, de EMAK S.P.A.: Dispositivo motorizado portátil para herramientas de jardinería, que comprende un cárter , un motor alojado en el cárter , un árbol de transmisión asociado […]
Dispositivo motorizado portátil para herramientas de jardinería, del 1 de Diciembre de 2015, de EMAK S.P.A.: Dispositivo motorizado portátil para herramientas de jardinería, que comprende un cárter , un motor alojado en el cárter , un árbol de transmisión asociado […]
ASPIRADOR DE HOJAS, del 2 de Febrero de 2012, de 4522958 CANADA INC: Un aspirador de hoja, que comprende: una estructura de bastidor; una estructura de rejilla fijada a dicha estructura de bastidor; […]