Método y aparato para posicionar sistemas de procesamiento automatizados.
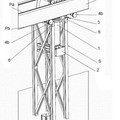
Un aparato para posicionar un sistema (150) de procesamiento automatizado que tiene una pista (152) que puede engancharse con una superficie,
comprendiendo el aparato:
un chasis (204) que lleva de manera selectiva el sistema (150) de procesamiento automatizado y la pista (152);
al menos tres ruedas (208, 208') conectadas al chasis (204) que soportan de manera selectiva el chasis (204) en la superficie y permiten de manera selectiva el movimiento del chasis (204) alrededor de la superficie;
un componente (212) de accionamiento operativamente conectado a las ruedas (208, 208') que propulsa de manera selectiva las ruedas (208, 208') para mover el chasis (204) alrededor de la superficie;
un componente (216) de elevación que mueve de manera selectiva el chasis (204) entre una primera posición y una segunda posición, en el que la segunda posición está más alejada de la superficie que la primera posición; y
un componente (220) de agarre conectado al chasis (204) que se mueve de manera selectiva con respecto a la pista (152) entre una primera posición que engancha la pista (152) y una segunda posición sustancialmente desenganchada de la pista (152).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2014/016315.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: BUTTRICK,JAMES N.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00). › en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
PDF original: ES-2681422_T3.pdf
Patentes similares o relacionadas:
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
SISTEMA DE CONEXIÓN Y DESCONEXIÓN AUTOMÁTICA DE CONTENEDORES REFRIGERADOS, del 19 de Septiembre de 2019, de HERNANDEZ HERNANDEZ, Alba: Sistema de conexión y desconexión automática de contenedores refrigerados. Sistema que permite de forma automatizada la conexión y desconexión de […]
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
Robot- máquina automática de pintado de estructuras (R-MAPE), del 9 de Enero de 2019, de ROCA VILARIÑO, David: Robot-Máquina Automática de Pintado de Estructuras (R-MAPE) dotada de una cabina de supervisión y control , con estructura para movimiento […]
 Manipulador robotizado, para movimiento de cargas, del 8 de Julio de 2013, de JATORMAN, S.L: Manipulador robotizado para movimiento de cargas, que puede disponerse en un soporte (S) en posición de recogida y suspendido de una grúa o puente-grúa (P) en posición operativa.
Consta […]
Manipulador robotizado, para movimiento de cargas, del 8 de Julio de 2013, de JATORMAN, S.L: Manipulador robotizado para movimiento de cargas, que puede disponerse en un soporte (S) en posición de recogida y suspendido de una grúa o puente-grúa (P) en posición operativa.
Consta […]
DISPOSITIVO PARA LA MANIPULACIÓN Y/O ELABORACIÓN DE OBJETOS, del 15 de Julio de 2011, de MOTOR POWER COMPANY S.R.L: Dispositivo para la manipulación y/o elaboración de objetos, que comprende: - al menos un primer brazo que comprende una primera extremidad […]
DISPOSITIVO DE TRANSPORTE PARA CONJUNTOS CONSTRUCTIVOS DE SOLDADURA PARA CARROCERIAS DE AUTOMOVILES., del 16 de Diciembre de 2005, de THYSSENKRUPP DRAUZ GMBH: Dispositivo de transporte para conjuntos constructivos de soldadura para carrocerías de automóviles, en especial conjuntos constructivos de fondo, con […]