Método de corrección de la posición y desviación de una aguja de una jeringa en una máquina para la preparación automática de medicación intravenosa.
Método de corrección de la posición y desviación de una aguja de una jeringa en una máquina para la preparación automática de medicación intravenosa,
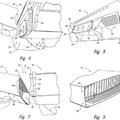
comprendiendo la máquina un actuador automático, dicho actuador automático siendo un brazo robótico (1), con sistema de control, en el que queda colocada la jeringa (11) y un sensor de posición unidimensional que comprende un plano de medición, comprendiendo el método de corrección las siguientes etapas:
disposición, por parte del actuador (1) automático, de la jeringa (11) en una primera posición (P1) de medición en la que un primer punto de la aguja (12) interfiere en el plano de medición del sensor de posición,
obtención, mediante el sensor de posición, de una primera coordenada de posición del primer punto de la aguja (12), disposición, por parte del actuador (1) automático, de la jeringa (11) en una segunda posición (P1-13) de medición en la que un segundo punto de la aguja (12),
localizado a una distancia determinada del primer punto, interfiere en el plano de medición del sensor de posición, obtención, mediante el sensor de posición, de una primera coordenada de posición del segundo punto de la aguja (12), rotación de 90º, por parte del actuador (1) automático, de la jeringa (11) con respecto al eje longitudinal de la misma, disposición,
por parte del actuador (1) automático, de la jeringa (11) girada 90º en una tercera posición (P2) de medición en la que el primer punto de la aguja (12) interfiere en el plano de medición del sensor de posición, obtención, mediante el sensor de posición, de una segunda coordenada de posición del primer punto de la aguja (12),
disposición, por parte del actuador (1) automático, de la jeringa (11) girada 90º en una cuarta posición (P2-13) de medición en la que el segundo punto de la aguja (12) interfiere en el plano de medición del sensor de posición, obtención, mediante el sensor de posición, de una segunda coordenada de posición del segundo punto de la aguja (12),
alejamiento, por parte del actuador (1) automático, del sensor de posición, determinación, por parte del sistema de control del actuador (1) automático, del error de posición y desviación de la aguja (12) respecto a una aguja (12') de referencia mediante las coordenadas de posición obtenidas en las fases anteriores,
corrección, por parte del sistema de control del actuador (1) automático, del error de posición y desviación de la aguja (12). tras la corrección del error de posición y desviación de la aguja (12),
dicho brazo robótico (1) adopta una posición tal que la aguja (12) pincha un contenedor (4) perpendicularmente, independientemente de su desviación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E16382478.
Solicitante: GRIFOLS ENGINEERING, S.A.
Nacionalidad solicitante: España.
Inventor/es: RUBIO AGUILERA,Javier, CASANOVA MONTPEYÓ,Oriol.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61J1/20 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61J RECIPIENTES ESPECIALMENTE ADAPTADOS PARA USOS MEDICOS O FARMACEUTICOS; DISPOSITIVOS O METODOS ESPECIALMENTE CONCEBIDOS PARA CONFERIR A LOS PRODUCTOS FARMACEUTICOS UNA FORMA FISICA O DE ADMINISTRACION PARTICULAR; DISPOSITIVOS PARA ADMINISTRAR ALIMENTOS O MEDICINAS VIA ORAL; CHUPETES PARA BEBES; ESCUPIDERAS. › A61J 1/00 Recipientes especialmente adaptados a fines médicos o farmacéuticos (cápsulas o similares para administración vía oral A61J 3/07; adaptados especialmente para instrumentos o aparatos quirúrgicos o de diagnóstico A61B 50/30; recipientes para sustancias radioactivas G21F 5/00). › Disposiciones para la transferencia de líquidos, p. ej. del frasco o la jeringa.
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01B11/24 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
- G01B11/27 G01B 11/00 […] › para ensayar la alineación de ejes.
PDF original: ES-2702039_T3.pdf
Patentes similares o relacionadas:
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende: a) un primer sensor de dirección espacial […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Detección de posición, del 18 de Marzo de 2020, de Airbus Operations Limited: Aparato para determinar la posición de un objeto que tiene uno o más elementos magnéticos , el aparato comprende una […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
PROCEDIMIENTO DE CARACTERIZACION DE ELEMENTOS REFLECTORES A PARTIR DE LOS HACES DE LUZ REFLEJADOS EN LOS MISMOS, del 27 de Enero de 2020, de FUNDACION CENER-CIEMAT: Dispositivo, sistema y procedimiento de caracterización de elementos reflectores a partir de los haces de luz reflejados en los mismos y en […]