Sistema de posicionamiento de un robot.
Un método de posicionamiento de un robot que comprende los pasos de:
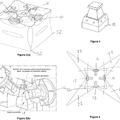
iluminar (S101) un espacio con al menos un primer láser lineal que proyecta líneas láser verticales dentro del campo de visión de una cámara;
registrar (S102), con la cámara, una fotografía del espacio iluminado por las líneas láser verticales;
extraer (S103), de la fotografía registrada, los datos de imagen que representan una línea formada por las líneas láser verticales que se reflejan contra los objetos ubicados dentro del espacio;
comparar (S103b) los datos de imagen de la fotografía registrada con los datos de imagen de, al menos, una fotografía registrada anteriormente;
ajustar (S103c) la línea extraída en función de la comparación de dichos datos de imagen utilizando navegación por estima, en la que se registra una posición estimada del robot en el instante del registro de la fotografía respectiva; y
crear (S104'), a partir de la línea extraída y ajustada, una representación del espacio iluminado a lo largo de las líneas láser proyectadas, donde el robot está situado con respecto a dicha representación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2013/067500.
Solicitante: AKTIEBOLAGET ELECTROLUX.
Nacionalidad solicitante: Suecia.
Dirección: S:t Göransgatan 143 105 45 Stockholm SUECIA.
Inventor/es: HAEGERMARCK, ANDERS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S17/46 G01S 17/00 […] › Determinación indirecta de datos de posición.
PDF original: ES-2610755_T3.pdf
Patentes similares o relacionadas:
DISPOSITIVO EMISOR DE RADIACION INFRARROJA PARA MARCACIÓN DE BLANCOS MÓVILES., del 18 de Marzo de 2020, de SISTEMAS DE CONTROL REMOTO, S.L: 1. Dispositivo emisor de radiación infrarroja para marcación de blancos móviles, utilizando para ello una fuente de radiación IR, emitiendo en una […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]
Termómetro de infrarrojos, del 21 de Agosto de 2019, de Bio Echo Net Inc: Un termómetro de infrarrojos capaz de medir una temperatura corporal sin contacto con un cuerpo humano (TG), que comprende: una unidad principal […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Procedimiento y dispositivo para asegurar un espacio atravesado por un haz láser de alta potencia, del 3 de Julio de 2019, de ArianeGroup SAS: Procedimiento para asegurar un espacio atravesado por un haz láser de alta potencia: caracterizado por que: • se genera al menos un haz […]
Sistema de referencia de posición y método para posicionar y seguir uno o más objetos, del 1 de Mayo de 2019, de KONGSBERG SEATEX AS: Método para posicionar y seguir uno o más objetos por medio de una unidad de transceptor fijada a una plataforma del sensor, tal como un objeto o embarcación, y uno […]