Vehículo aéreo discoidal.
1. Vehículo aéreo discoidal, del tipo de los vehículos aéreos no tripulados,
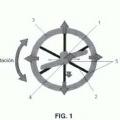
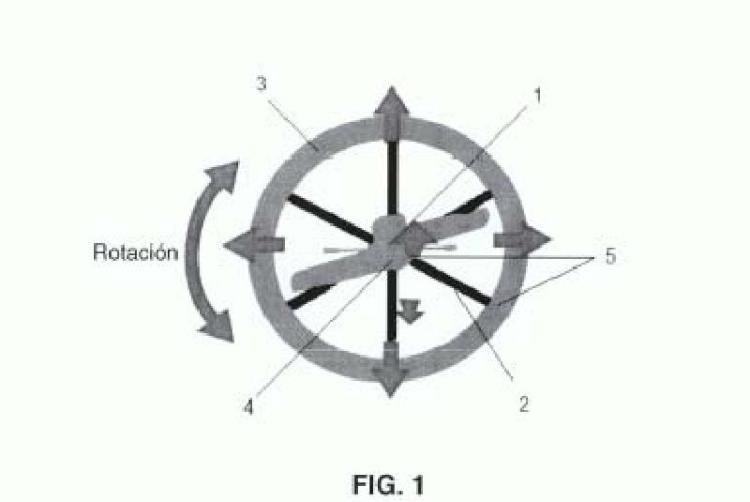
denominados drones, con un único rotor central (1) de sustentación y un chasis (3), caracterizado porque comprende, al menos, dos alas (2) situadas en el flujo saliente, aguas abajo, del rotor (1), dichas alas (2) con ángulo de incidencia variable, de manera que permitan contrarrestar el efecto del par motor del rotor central (1), y conseguir rotar el vehículo de forma controlada respecto a un eje perpendicular al plano del rotor (1) y que pasa por el centro de dicho rotor (1).
2. Vehículo según reivindicación 1, caracterizado porque el chasis (3) comprende una carcasa discoidal periférica en torno al rotor (1) y en el plano de éste.
3. Vehículo según reivindicación 1, caracterizado porque el rotor central (1) incorpora un plato cíclico (1.2), con servos y varillas de transmisión (1.3), para variar la sustentación producida por la hélice (1.4) del rotor (1) tanto en magnitud como en dirección, lo que permite controlar la direccionalidad del empuje del rotor central (1) y, por tanto, el guiado del vehículo.
4. Vehículo según cualquiera de las reivindicaciones anteriores, caracterizado porque cada ala (2) va unida a un servo (5) incorporado en el chasis (3), que permite graduar el ángulo de incidencia del ala (2) y, por tanto, controlar el efecto antipar.
5. Vehículo según cualquiera de las reivindicaciones anteriores, caracterizado porque dispone, al menos, de cuatro alas (2), de las que, al menos, dos de ellas se dedican al control del efecto antipar y las, al menos, otras dos se emplean para rotar el vehículo respecto a un eje perpendicular al plano del rotor (1).
6. Vehículo según cualquiera de las reivindicaciones anteriores, caracterizado porque incorpora una cámara de giro en 360 grados.
7. Vehículo según reivindicación 6, caracterizado porque incorpora patas de apoyo para protección de dicha cámara.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201500677.
Solicitante: CARBAJAL GARCÍA, Borja.
Nacionalidad solicitante: España.
Inventor/es: CARBAJAL GARCÍA,Borja.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C27/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 27/00 Giroaviones; Sus rotores específicos (dispositivos de aterrizaje B64C 25/00). › Giroaviones caracterizados porque tienen rotores carenados, p. ej. plataformas volantes.
- B64C39/02 B64C […] › B64C 39/00 Aeronaves no previstas en otro lugar. › caracterizadas por un uso especial.

Fragmento de la descripción:
VEHicULO AÉREO DISCOIDAL
SECTOR DE LA TÉCNICA
Dicha invención está pensada principalmente para el sector de los vehículos aéreos no tripulados en el ámbito civil y militar, pudiéndolo considerar como de vital importancia para el futuro de la aeronáutica.
ANTECEDENTES DE LA INVENCiÓN
Las realizaciones conocidas del tipo helicóptero tienen una formación que condiciona y limita los factores de estabilidad y de maniobrabilidad, por lo que requiere de un pilotaje por parte de un experto, así como una carencia aerodinámica por lo que el aire expulsado no es tan limpio (en términos aerodinámicos) .
En relación a los multirrotores, bien es conocida su gran deficiencia en relación a la autonomía que poseen, ya que al poseer múltiples rotores, el consumo energético es más elevado. Cabe recalcar que el mantenimiento y el cambio de las piezas es mayor y más delicado que el de, por ejemplo, un helicóptero de unas mismas dimensiones. Con esta nueva invención solo es necesario el uso de un motor y de un rotor .
Respecto a los aviones, las carencias conocidas hasta el día de hoy, están relacionadas con su escasa maniobrabilidad y el no poder mantenerse estático en el aire durante un tiempo determinado.
EXPLICACiÓN DE LA INVENCiÓN
En qué consiste la invención?
La invención consiste en desarrollar un nuevo sistema aeronáutico que ofrezca una nueva forma de constrarrestar el efecto par motor de todo cuerpo sujeto a la tercera ley de Newton (acción-reacción) , y que ofrezca una mejoría en prestaciones subsanando las deficiencias que existen actualmente en los sistemas aéreos no tripulados (UAS) .
La estructura de dicho aparato esta compuesta por un único rotor principal de sustentación y un chasis con forma de plato o de disco, compuesta en su interior por un conjunto de alas o aletas con ángulo de incidencia variable conectadas a servos, las cuales según potencia, dimensiones, peso y factores externos, tales como el viento, se indinan en una determinada graduación, haciendo que el chasis se mantenga quieto y estable e innovando en la técnica de evitar el famoso efecto torque o par motor. Dependiendo de dichos factores, podrán tener un número de alas determinado, en el caso del vehículo de seis y el de cuatro alas, unas se pueden inclinar para evitar dicho efecto y otras para otorgar al vehículo aéreo no tripulado una mejor aerodinámica de vuelo.
El vehículo en cuestión, posee unas cualidades que le permiten:
-Una nueva técnica para evitar el efecto par motor.
-Despegar y aterrizar de forma vertical ( VTOL ) .
-La capacidad de mantenerse estático en el aire.
-y una maniobrabilidad muy superior a la que poseen los helicópteros convencionales, sean tripulados o no, es decir, puede ir tanto para adelante como para atrás, tanto para el lado izquierdo como para el derecho, de forma instantánea e intuitiva, no tan lenta como los helicópteros. A diferencia de un helicóptero, dicho vehículo al poseer forma discoidal, tiene un margen de maniobra de 3600 (omnidireccional) , por ejemplo, un helicóptero necesita de los sistemas que contrarrestan el efecto par motor, para dar direccionalidad y que el piloto tenga siempre el aparato por así decir de frente. La invención presente posee la capacidad, de ir de frente y de repente dar la vuelta sin necesidad de girar 1800. Hemos programado la cámara de tal forma que cada vez que se cambie la dirección, la cámara gire de forma automática, por lo que da la sensación de que vas siempre de frente. Dicha modalidad se puede poner o quitar, según los gustos del piloto. Podría decirse que la maniobrabilidad es parecida a la de un multirrotor, solo que a parte de utilizar, en vez de varios rotores solo uno (por lo que el consumo energético es inferior y la autonomía superior) , tendrá en vez de movimientos bruscos, unos movimientos más suaves, intuitivos y sobre todo más estables.
Qué la distingue de las mencionadas en el estado de la técnica?
Respecto a los helicópteros;
-Principalmente una nueva forma de contrarrestar el efecto par motor de los helicópteros y de todo cuerpo sujeto a la tercera ley de Newton (acción -reacción) , ya que los conceptos de helicóptero actuales se basan en sistemas como, el rotor de cola
o fenestron, coaxial, transversal, NOTAR, sincrónicos yen tándem para contrarrestar el par motor.
-Mayor maniobrabilidad y estabilidad.
-Es más coherente con el medio ambiente, ya que el prototipo desarrollado en un
principio es eléctrico, a diferencia de los helicópteros que emiten C02.
-Al ser un vehículo aéreo no tripulado los pilotos no corren riesgo de accidente o muerte.
-Al poseer forma discoidal o de plato hay mejor aerodinámica de vuelo.
Respecto a los multirrotores;
-No es necesario el uso de varias hélices o motores para poder desplazar un vehículo
de forma rápida y acrobática, de hecho, dicho sistema es más estable que los denominados multirrotores.
-Al ser el chasis de forma discoidal, puedes incorporar varias baterías más, por lo que
la autonomía es muy superior a los denominados multirrotores. También una única batería se encarga de alimentar un solo motor en vez de tres, cuatro, Ó, el número de rotores que que posea dicho multirrotor por lo que tambíen con una sola batería poseerá una mayor autonomía.
-Movimientos menos bruscos.
Respecto a los aviones y alas volantes;
-La principal ventaja es no necesitar, o una catapulta y red para aterrizar/despegar, o 5 una pista de aterrizaje y despegue.
-La maniobrabilidad es infinitamente superior.
-Se puede mantener estático en el aire (indispensable para mantenerse un tiempo determinado en un punto fijo) .
Cuáles son sus partes esenciales?
Las partes esenciales del dispositivo son:
-Rotor principal y único: el rotor central incorpora un plato cíclico, con servas y varillas de transmisión, para variar la sustentación producida por la hélice del rotor tanto en magnitud como en dirección, lo que permite controlar la direccionalidad del empuje del rotor central y, por tanto, el guiado del vehículo. Es el mismo que utiliza un helicóptero
pero sin hacer falta los sistemas mencionados; rotor de cola o fenestron, rotor transversal, coaxial, en tandem, NOTAR, sincrónicos para evitar el efecto torque o efecto par motor. Las hélices del rotor no deben de sobresalir del chasis para una mejor aerodinámica.
-Chasis discoidal: Es la parte más relevante. Lo que rodea al rotor principal es un
chasis que posee en su interior un número determinado de alas o aletas (2, 3.4, 5, 6, 8, es decir, las que requiera el aparato) internas de ángulo de incidencia variable conectadas a un servo o conjunto de servas. Dichos servas pueden estar dentro del núcleo central
o dentro del chasis-aro del vehículo. Las servas son los que se encargan de dar la graduación correspondiente a las alas para contrarrestar el efecto par motor logrando así que el chasis o carcasa se mantenga quieto y estable. Dependiendo de la potencia, del peso, de las dimensiones y de factores externos tales como el viento, dichas alas necesitaran un grado de incidencia determinado para contrarrestar el efecto par motor. También se pueden utilizar la inclinación de las alas para rotar (darle torque) el vehículo a derechas o a izquierdas. La clave está en el grado de incidencia de las alas.
-Cámara de giro de 3600, que podrá ser de todos los tipos, por ejemplo, cámara nocturna, cámara multiespectral, cámara de infrarrojOs, etc.
-Incorpora patas de apoyo para proteger la cámara. Dichas patas pueden incorporarse en el núcleo o en el chasis.
-Podrá incorporar el número de baterías que se requiera (en el interior de la aro35 chasis) para otorgarle la autonomía deseada.
-El núcleo podrá ser cilíndrico, hexagonal, o de cualquier forma geométrica: Incorporará el motor, la batería principal, servas del rotor principal, el receptor, servas de las alas, es decir todo tipo de instrumental necesario para que sea un UAV de última generación (gps, magnetómetro, sonar, etc) o un drone destinado a la juguetería u
otros quehaceres.
BREVE DESCRIPCiÓN DE LOS DIBUJOS
La descripción se complementa, para una fácil comprensión de la descripción que se está realizando, con un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente :
Figura 1. -Muestra una perspectiva aérea de un prototipo con seis alas.
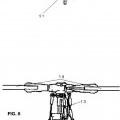
Figura 2. -Muestra una perspectiva lateral del prototipo de seis alas.
Figura 3....
Reivindicaciones:
1. Vehículo aéreo discoidal, del tipo de los vehículos aéreos no tripulados, denominados drones, con un único rotor central (1) de sustentación y un chasis (3), caracterizado porque comprende, al menos, dos alas (2) situadas en el flujo saliente, aguas abajo, del rotor (1), dichas alas (2) con ángulo de incidencia variable, de manera que permitan contrarrestar el efecto del par motor del rotor central (1), y conseguir rotar el vehículo de forma controlada respecto a un eje perpendicular al plano del rotor (1) y que pasa por el centro de dicho rotor (1).
2. Vehículo según reivindicación 1, caracterizado porque el chasis (3) comprende una carcasa discoidal periférica en torno al rotor (1) y en el plano de éste.
3. Vehículo según reivindicación 1, caracterizado porque el rotor central (1) incorpora un plato cíclico (1.2), con servos y varillas de transmisión (1.3), para variar la sustentación producida por la hélice (1.4) del rotor (1) tanto en magnitud como en dirección, lo que permite controlar la direccionalidad del empuje del rotor central (1) y, por tanto, el guiado del vehículo.
4. Vehículo según cualquiera de las reivindicaciones anteriores, caracterizado porque cada ala (2) va unida a un servo (5) incorporado en el chasis (3), que permite graduar el ángulo de incidencia del ala (2) y, por tanto, controlar el efecto antipar.
5. Vehículo según cualquiera de las reivindicaciones anteriores, caracterizado porque dispone, al menos, de cuatro alas (2), de las que, al menos, dos de ellas se dedican al control del efecto antipar y las, al menos, otras dos se emplean para rotar el vehículo respecto a un eje perpendicular al plano del rotor (1).
6. Vehículo según cualquiera de las reivindicaciones anteriores, caracterizado porque incorpora una cámara de giro en 360 grados.
7. Vehículo según reivindicación 6, caracterizado porque incorpora patas de apoyo para protección de dicha cámara.
Patentes similares o relacionadas:
DISPOSITIVO DE PURIFICACIÓN, DESINFECCIÓN Y CONTROL DE LA CALIDAD DEL AIRE Y ENTORNOS MEDIANTE DRON, del 7 de Julio de 2020, de TALESTECH, S.L.U: 1. Dispositivo de purificación, desinfección y control de la calidad del aire y entornos mediante dron (A) con capacidad para efectuar un vuelo […]
Sistema para el diagnóstico de turbinas eólicas de un generador eólico y método de diagnóstico de una turbina eólica, del 2 de Julio de 2020, de UNIVERSIDAD DE CASTILLA-LA MANCHA: Sistema para el diagnóstico de turbinas eólicas de un generador eólico , que comprende un vehículo aéreo no tripulado (UAV) previsto para acercarse a una turbina eólica […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Sistema y método para ocultar dinámicamente video e imágenes capturadas con una cámara de dispositivo dron, del 10 de Junio de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: dar instrucciones a un dispositivo dron para que vuele cerca de una potencial área de vigilancia mientras está en […]
Geometría de ala de aeronave de gran altitud, del 10 de Junio de 2020, de Stratospheric Platforms Limited: Una aeronave no tripulada de larga duración de gran altitud que comprende una estructura del ala, un fuselaje y una cola, que opera por encima de 15 […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
Dron neumático, del 3 de Junio de 2020, de San Jorge Tecnológicas, S.L: Un vehículo volador no tripulado con una o más hélices las cuales están conectadas a uno o más motores neumáticos adaptados para ser accionados por un fluido, caracterizados […]
Dispositivo de protección de Vehículo Aéreo No Tripulado (VANT) frente al impacto y a las altas temperaturas, del 29 de Mayo de 2020, de ARES LAVADO, ALVARO: 1. Dispositivo de protección de vehículo aéreo no tripulado (VANT) frente al impacto y a las altas temperaturas, caracterizado porque presenta: - […]