SISTEMA Y MÉTODO PARA LA VERIFICACIÓN DE LA TRAYECTORIA DE UN TÚNEL.
Sistema y método para la verificación de la trayectoria de un túnel.
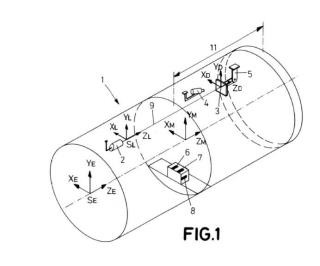
La invención proporciona un sistema para la verificación de la trayectoria de un túnel (1). Este sistema comprende, al menos una superficie de recepción adecuada para la recepción de luz láser (3, 13), sensores (4, 14) adecuados para capturar datos sobre la incidencia del láser (9) en la al menos una superficie adecuada para la recepción de luz láser (3, 13), un soporte (5, 15) adecuado para sujetar la al menos una superficie de recepción (3, 13), y medios de procesamiento de información (6). Los sensores (4, 14) están adaptados para transmitir los datos sobre la incidencia del láser (9) a los medios de procesamiento de la información (6), y el soporte (5, 15) puede moverse en varios grados de libertad lineales y/o angulares, estando adaptado para transmitir información sobre su movimiento a los medios de procesamiento de la información (6). La invención también comprende un método de verificación de la trayectoria de un túnel.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330794.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ DE LA CASA DIAZ,SANTIAGO, JARDON HUETE,ALBERTO, BALAGUER BERNALDO DE QUIROS,CARLOS, PORTERO HERNÁNDEZ,Rafael, MARTÍ CARDONA,Marc, GONZÁLEZ VÍTORES,Juan Carlos.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E21D9/00 CONSTRUCCIONES FIJAS. › E21 PERFORACION DEL SUELO O DE LA ROCA; EXPLOTACION MINERA. › E21D POZOS; TUNELES; GALERIAS; GRANDES CAMARAS SUBTERRANEAS (materiales para acondicionar o estabilizar el suelo C09K 17/00; máquinas cortantes para la explotación de minas o canteras E21C; dispositivos de seguridad, de transporte, de salvamento, de ventilación o de drenaje E21F). › Túneles o galerías, con o sin revestimientos; Procedimientos o aparatos para su ejecución (revestimientos en sí E21D 11/00; galerías de protección contra la caída de rocas o las avalanchas E01F 7/04 ); Trazado de túneles o de galerías.
- G05D1/10 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
Fragmento de la descripción:
SISTEMA Y MÉTODO PARA LA VERIFICACiÓN DE LA TRAYECTORIA DE UN TÚNEL
OBJETO DE LA INVENCiÓN
La presente invención está dirigida a un sistema y un método para la verificación de la trayectoria de un túnel, ya sea durante su realización o mediante una comprobación posterior.
ANTECEDENTES DE LA INVENCiÓN
Las máquinas tuneladoras son empleadas para la realización de túneles bajo tierra. Debido a las grandes exigencias mecánicas de este trabajo y a la gran distorsión (vibraciones, ruido, polvo) que genera en los sistemas que la acompañan, es muy corriente que la máquina cometa desviaciones con respecto al itinerario trazado como objetivo. Además, una vez realizado el túnel, las alternativas disponibles para verificar la trayectoria final del túnel presentan algunas desventajas, como se verá a continuación.
En lo relativo al guiado de las tuneladoras, existen diversas soluciones en el estado de la técnica para llevar a cabo este guiado. La más conocida, descrita por la patente US 5.501.548, consiste en la colocación de un conjunto de espejos para detectar la incidencia de un haz de luz láser, junto con una cámara que monitorice esta incidencia. Mediante la comparación de la incidencia recibida con la trayectoria esperada, se obtiene la corrección que necesitaría la máquina para seguir dicha trayectoria deseada. Una solución parecida se describe en US 5.529.437, donde en lugar de los espejos, se utilizan un par de superficies, una translúcida y otra opaca, a modo de diana, para recibir la incidencia del láser. Una solución mejorada la presenta el sistema "Basic System ZED 26" de la empresa ZED Tunnel Guidance Ud. Este dispositivo incluye un soporte para la diana que recibe la incidencia del láser tal que permite su montaje y desmontaje de manera más rápida.
Estas soluciones presentan algunos problemas. El problema más importante es la necesidad de detener el trabajo cada vez que, debido a la desviación de la máquina o al radio de curvatura de la trayectoria a seguir, la incidencia del láser se sale fuera del campo de alcance del mecanismo de recepción del láser. Esta parada incluye la recalibración de las referencias por parte del topógrafo y requiere que durante este periodo el funcionamiento de la tuneladora esté interrumpido. Esto retrasa notoriamente la marcha de la obra, y supone
una pérdida de rendimiento importante de estas máquinas tuneladoras.
S En cuanto al replanteo de túneles realizados mediante tuneladoras, se conoce el uso de la topografía clásica. No obstante, este método se ha descartado en el ámbito que nos ocupa, debido a la lentitud en la presentación de la información y a la falta de visibilidad necesaria para realizar un replanteo eficaz.
DESCRIPCiÓN DE LA INVENCiÓN
10 La presente invención propone una solución a los problemas anteriores mediante un sistema de verificación de la trayectoria de un túnel según la reivindicación 1 y un método de verificación de la trayectoria de un túnel según la reivindicación 11. En las reivindicaciones dependientes se definen realizaciones preferidas de la invención.
15 20 25 30 Un primer aspecto inventivo proporciona un sistema para la verificación de la trayectoria de un túnel, que comprende: al menos una primera superficie de recepción, adecuada para la recepción de luz láser, al menos un sensor adecuado para capturar datos sobre la incidencia de una señal emitida de luz láser en la al menos una primera superficie de recepción, un soporte adecuado para sujetar la al menos una primera superticie de recepción , y medios de procesamiento de información; donde el al menos un sensor está fijado solidariamente con el soporte y/o con la al menos una primera superficie de recepción, y está adaptado para transmitir los datos sobre la incidencia de la señal emitida de luz láser a los medios de procesamiento de la información, y el soporte está adaptado para moverse en varios grados de libertad lineales y/o angulares bajo la acción de un actuador, estando el actuador adaptado para transmitir información sobre el movimiento del soporte a los medios de procesamiento de la información.
35 Ventajosamente, esta configuración permite que la superticie de recepción pueda ser desplazada en el caso de que la trayectoria que sigue se aleje demasiado del haz fijo de luz láser, que siempre es emitido según la misma recta, retrasando así el momento en el que es necesario parar la maquinaria y volver a montar el sistema de emisión de luz láser en otra
posición de referencia porque el haz se ha salido del rango de tolerancia de la superficie de recepción.
En una realización particular, el al menos un sensor es una cámara adecuada para capturar imágenes de la incidencia de la señal emitida de luz láser sobre la al menos una primera superficie de recepción.
En una realización particular, los sensores están integrados en la primera superficie de recepción, configurando así esta superficie como fotosensible.
En una realización particular, el sistema comprende adicionalmente una segunda superficie de recepción que forma junto con la primera superficie de recepción una diana de puntería, siendo ambas superficies de recepción primera y segunda sustancialmente paralelas, estando separadas entre sí una distancia z1 , y el soporte está adaptado para mover la diana de puntería en varios grados de libertad lineales o angulares.
Ventajosamente, esta realización permite tener dos medidas con una sola emisión de luz láser, ya que el haz incide sobre la primera superficie y sobre la segunda. Como la distancia entre ambas superficies es conocida y la posición relativa de las mismas entre sí no cambia, se pueden obtener datos sobre la orientación de esta diana de puntería.
El soporte es cualquier tipo de soporte capaz de sostener la diana de puntería en una posición fija, y está adaptado para mover la diana de puntería en varios grados de libertad lineales o angulares. En una realización particular, este soporte puede ser un sistema de rodillos capaz de mover la diana de puntería en dos grados de libertad angulares.
En una realización particular, el soporte es un brazo robótico adecuado para mover la primera superficie de recepciónen los tres grados de libertad lineales y en al menos otro grado de libertad angular.
En una realización particular, la al menos una primera superficie de recepción, los sensores y el soporte se encuentran montados en una máquina tuneladora.
Ventajosamente, esta realización permite llevar a cabo la comprobación de la trayectoria de un túnel que se está realizando, mientras la máquina tuneladora está perforando dicho túnel.
En una realización particular, el sistema comprende adicionalmente medios de actuación sobre la máquina tuneladora.
Ventajosamente, esta realización permite enviar información a la máquina tuneladora para que corrija la trayectoria que está siguiendo en base a los datos obtenidos por las superficies de recepción .
En una realización particular, el sistema comprende adicionalmente un sistema de medición de avance longitudinal de la máquina tuneladora.
Ventajosamente, esta realización permite calcular la posición de la máquina tuneladora, de modo que los datos sobre corrección de trayectoria se pueden hacer en base al recorrido real y no a un recorrido estimado.
En una realización particular, el sistema comprende adicionalmente medios de guiado a lo largo de los cuales el soporte se puede desplazar
En una realización particular, los medios de guiado son un carril, que recorre la periferia de una sección transversal de la máquina tuneladora.
En una realización particular, la al menos una superficie de recepción , los sensores y el soporte se encuentran dentro de un sistema móvil de desplazamiento adecuado para recorrer un túnel existente.
Ventajosamente, esta realización permite comprobar la trayectoria de un túnel ya realizado, montando el sistema, no en la tuneladora, sino en un móvil que recorra el túnel.
En una realización particular, el sistema comprende adicionalmente un sistema de emisión de luz láser (2) .
En un segundo aspecto inventivo, la invención proporciona un método de verificación de la trayectoria de un túnel, que comprende las etapas de:
(a) emitir una señal de luz láser,
(b) capturar primeros datos dO sobre la incidencia de dicha señal en una primera superficie de recepción, en forma de primera posición pO relativa a un punto c1 definido como centro de dicha primera superficie de recepción,
(e) mover la primera superficie de recepción hasta que la incidencia de la señal emitida de luz láser coincida...
Reivindicaciones:
1. Sistema para la verificación de la trayectoria de un túnel (1) , caracterizado por que comprende: al menos una primera superficie de recepción (3, 31) , adecuada para la recepción de luz láser, al menos un sensor (4, 14) adecuado para capturar datos sobre la incidencia de una señal emitida de luz láser (9) en la al menos una primera superficie de recepción (3, 31) , un soporte (5, 15) adecuado para sujetar la al menos una primera superficie de recepción (3, 31) , Y medios de procesamiento de información (6) ; donde el al menos un sensor (4, 14) está fijado solidariamente con el soporte (5, 15) y/o con la al menos una primera superficie de recepción (3, 31) , y está adaptado para transmitir los datos sobre la incidencia de la señal emitida de luz láser (9) a los medios de procesamiento de la información (6) , y
el soporte (5, 15) está adaptado para moverse en varios grados de libertad lineales y/o angulares bajo la acción de un actuador, estando el actuador adaptado para transmitir información sobre el movimiento del soporte (5, 15) a los medios de procesamiento de la información (6) .
2. Sistema para la verificación de la trayectoria de un túnel (1) según la reivindicación 1, caracterizado por que el al menos un sensor (4, 14) es una cámara adecuada para capturar imágenes de la incidencia de la señal emitida de luz láser (9) sobre la al menos una primera superficie de recepción (3, 13) .
3. Sistema para la verificación de la trayectoria de un túnel (1) según la reivindicación 1, caracterizado por que los sensores (4, 14) están integrados en la primera superficie de recepción (3, 31) , configurando así esta superficie (3, 31) como fotosensible.
4. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones anteriores, caracterizado por que Comprende adicionalmente una segunda superficie de recepción (32) que forma junto con la primera superficie de recepción (31) una diana de puntería (13) , siendo ambas superficies de recepción primera y segunda sustancialmente paralelas, estando separadas entre sí una distancia z1 , y
el soporte está adaptado para mover la diana de puntería (13) en varios grados de libertad lineales o angulares.
5. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones 1 a 3, caracterizado por que el soporte es un brazo robótica (5) adecuado para mover la primera superficie de recepción (3, 31) en los tres grados de libertad lineales y en al menos otro grado de libertad angular.
6. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones anteriores, caracterizado por que la al menos una primera superficie de recepción (3, 31) , los sensores (4, 14) Y el soporte (5, 15) se encuentran montados en una máquina tuneladora (11) .
7. Sistema para la verificación de la trayectoria de un túnel (1 ) según la reivindicación anterior caracterizado por que comprende adicionalmente medios de actuación (8) sobre la máquina tuneladora (11) .
8. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones 6 o 7, caracterizado por que comprende adicionalmente un sistema de medición de avance longitudinal (7) de la máquina tuneladora (11) .
9. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende adicionalmente medios de guiado a lo largo de los cuales el soporte (5, 15) se puede desplazar.
10. Sistema para la verificación de la trayectoria de un túnel (1) según la reivindicación anterior en la que los medios de guiado son un carril que recorre la periferia de una sección transversal de la máquina tuneladora (11) .
11. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones 1 a 5, donde la al menos una superficie de recepción (3, 13) , los sensores (4, 14) Y el soporte (5, 15) se encuentran dentro de un sistema móvil de desplazamiento adecuado para recorrer un túnel existente.
12. Sistema para la verificación de la trayectoria de un túnel (1) según cualquiera de las reivindicaciones anteriores que comprende adicionalmente un sistema de emisión de luz laser (2) .
13. Método de verificación de la trayectoria de un túnel, caracterizado por que comprende las etapas de:
(a) emitir una señal de luz láser (9) ,
(b) capturar primeros datos dO sobre la incidencia de dicha señal en una primera superficie de recepción (3, 31) , en forma de primera posición pO relativa a un punto c1 definido como centro de dicha primera superficie de recepción (3, 31) ,
(e) mover la primera superficie de recepción (3, 31) hasta que la incidencia de la señal emitida de luz láser (9) coincida en el punto c1 ,
(d) capturar segundos dalos d1 sobre la incidencia de dicha señal en una segunda superficie de recepción paralela a la primera y situada a una distancia z1 de la primera, en forma de primera posición p1 relativa a un punto c2 definido como centro de dicha segunda superficie de recepción,
(e) mover la segunda superficie de recepción hasta que la incidencia de la señal emitida de luz láser (9) coincida en el punto c2, y
(f) procesar los datos dO y d1 para calcular la desviación de la trayectoria real del túnel respecto a una trayectoria ideal predeterminada.
14. Método de verificación de la trayectoria de un túnel según la reivindicación anterior, en el que el movimiento de la primera superficie de recepción en la etapa (c) se realiza manteniendo dicha primera superficie en el plano que la contiene y el movimiento de la segunda superficie de recepción en la etapa (e) se realiza manteniendo dicha segunda superficie en el plano que la contiene.
15. Método de verificación de la trayectoria de un túnel según la reivindicación 13 o 14, caracterizado por que la segunda superficie de recepción corresponde a la primera superficie de recepción desplazada una distancia z1 respecto a su posición al término de la etapa (c) en una dirección perpendicular al plano de dicha superficie.
16. Método de verificación de la trayectoria de un túnel según la reivindicación anterior, caracterizado por que comprende adicionalmente una etapa de desplazamiento de la primera superficie de recepción una distancia z1 respecto a su posición al término de la etapa (e) en dirección perpendicular al plano de dicha superficie pero en sentido inverso al anterior desplazamiento.
17. Método de verificación de la trayectoria de un túnel según la reivindicación 13, caracterizado por que en la etapa (e) , el movimiento de la primera superficie de recepción se lleva a cabo girando solidariamente el conjunto formado por la primera superficie de recepción y la segunda superficie de recepción tomando como origen del giro la posición de un soporte adaptado para actuar sobre dicho conjunto.
18. Método de verificación de la trayectoria de un túnel según la reivindicación anterior, caracterizado por que en la etapa (e ) , el movimiento de la segunda superficie de recepción se lleva a cabo girando solidariamente el conjunto formado por la primera superficie de recepción y la segunda superticie de recepción tomando como origen del giro la posición del soporte adaptado para actuar sobre dicho conjunto.
19. Método de verificación de la trayectoria de un túnel según cualquiera de las reivindicaciones 13 a 18 caracterizado por que comprende adicionalmente unas etapas de calibración previas a la etapa (a ) : posicionar un sistema de emisión de luz láser (2 ) , posicionar una primera superficie de recepción, adecuada para la recepción de luz
láser (3, 31) , estando dicha superficie soportada por un soporte móvil (5, 15) que permite desplazar y/u orientar dicha primera superficie de recepción según varios grados de libertad
lineales y/o angulares, emitir una señal de calibración de luz láser, actuar sobre el soporte móvil de modo que la señal de calibración quede situada en el
centro de la superficie de recepción (3, 31 ) .
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Módulo de función de seguridad para un vehículo, del 12 de Febrero de 2020, de MBDA Deutschland GmbH: Módulo de función de seguridad para un vehículo , que comprende: una unidad de determinación de estado que está configurada […]
Procedimiento y dispositivo de navegación autónoma, del 1 de Enero de 2020, de ALERION TECHNOLOGIES, S.L: Un procedimiento de navegación autónoma para rastrear objetos de una turbina eólica, comprendiendo el procedimiento: - calibrar un sensor de visión artificial y un sensor […]
Procedimiento y sistema para el guiado, en la fase terminal, de un misil interceptor hacia un objetivo aéreo móvil, del 11 de Diciembre de 2019, de MBDA FRANCE: Procedimiento para el guiado, en la fase terminal de un misil interceptor hacia un objetivo aéreo, incluyendo dicho misil interceptor: · instrumentos de abordo […]