Sistema robótico de asistencia a la cirugía mínimamente invasiva de puerto único capaz de acomodar su movimiento a la anatomía de la pared abdominal.
Sistema robótico de asistencia a la cirugía mínimamente invasiva de puerto único con mecanismo de orientación activa capaz de acomodar su movimiento a la anatomía de la pared abdominal que comprende un robot extra-abdominal,
que a su vez comprende un efector final que, mediante campos magnéticos, permite posicionar y orientar un dispositivo médico para uso intra-abdominal El robot extra-abdominal comprende además un controlador software capaz de implementar un método para el guiado automático del dispositivo médico para uso intra-abdominal que permite su adaptación a la anatomía de la pared abdominal; y un sistema interfaz de comunicación y control que permite ordenar las acciones deseadas al sistema. Preferentemente, el sistema comprende además un dispositivo médico para uso intra-abdominal, más preferentemente un robot inta-abdominal dotado de un módulo que permite posicionar y orientar un dispositivo médico acoplado o comprendido en el robot intra-abdominal consistente preferentemente en un sistema de visión endoscópica.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400773.
Solicitante: UNIVERSIDAD DE MALAGA.
Nacionalidad solicitante: España.
Inventor/es: MUÑOZ MARTINEZ,VICTOR FERNANDO, GARCIA MORALES,ISABEL, DEL SAZ-OROZCO HUANG,Pablo, ESTÉBANEZ CAMPOS,Belén, BAUZANO NÚÑEZ,Enrique, RIVAS BLANCO,Irene, CUEVAS RODRÍGUEZ,María.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
Fragmento de la descripción:
SECTOR TÉCNICO
5
La presente invención pertenece a los sectores de la cirugía y la robótica, concretamente
al de los sistemas de apoyo a la práctica quirúrgica, y con mayor precisión a los sistemas
robóticas especialmente disef1ados como :instrurnentos quirúrgicos.
10 ESTADO DE LA TÉCNICA
La", operaciones quirúrgicas mediante técnicas laparoscópicas consisten en realizar la
intervención a través de pequeñas incisiones en el abdomen del paciente. A través de
estas incisiones se hacen pasar los instrwnentos requeridos por la operación en concreto,
15 asi como la óptica de una cámara que pt:rmite al cirujano obtener realimentación visual
de la zona en la que se realiza la intervención. Dentro de este tipo de intervenciones, las
técnicas de puerto (mico consisten en reducir el número de incisiones a una, en la que se
coloca un trocar multipuerto que penrute la inserción de 3 Ó 4 instrumentos. Estos
procedimientos, pese a ser menos invasivos para los pacientes, añaden dificultades
2 O adicionales para los cirujanos que empeoran su destreza a la hora de realizar un
procedimiento quirúrgico. De un lado, al introducirse la cámara a través del mismo
puerto de entrada que los instrumentos quirúrgicos, se produce una pérdida de
triangulación que se traduce en una pérdida de sensación de profundidad en la imagen
transmitida por el endoscopio. Además, la destreza de los cirujanos se ve disminuida
25 debido a la cercanía de las herramientas que deben trabajar, y a la presencia de un
asistente que debe manejar el endoscopio desde el mismo puerto de entrada.
Con objeto de flexibilizar el movimiento del endoscopio se han propuesto
algtm35 soluciones que hacen uso de elementos flexibles para dotar a los instrumentos de
mayor capacidad de movimiento. como por ejemplo en US 2006/0178556 ó US
30 2014/0155697. Pese a que con este tipo de dispositivos se aumenta el campo de visión
del endoscopio, éste sigue ocupando un puerto de entrada.
En US8360972 se presenta un dis.positivo que proporciona un sistema de puertos
virtuales que se pueden desplazar por la. pared abdominal o adherirse a órganos de la
cavidad abdominal medianle inleracción magnética, anclajes mecánicos (haciendo uso de agujas o cJips) , adhesivos o de succión. Estos puertos virtuales permiten la adhesión de instrumentos quirúrgicos, pero no proporcionan mecanismos activos de orientación de dichos instrumentos quinírgicos, como podría ser un endoscopio.
En CA 2678610 se presenta un dispositivo que incluye una consola de teleoperación que consta de una pantalla y un dispositivo de manipulación, y un robot intra-abdominal que consta de una cámara y dos. componentes que incorporan herramientas en su extremo. Dicho robot intra-abdominal se adhiere a la pared abdominal mediante interacción magnética con la consola de teleoperación. Sin embargo, este dispositivo no presenta mecanismos de orientación activa de la cámara que pennita ampliar el campo de visión de la misma.
En WO 2012/035 157 se presenta un endoscopio intra-abdominal adherido a la pared abdominal mediante interacción magnética. El dispositivo ¡ntra-abdominal consta de dos elementos unidos mediante un elemento flexible. El primero de ellos constituye el anclaje del dispositivo a la pared abdomi:nal y dota al conjunto de estabilidad, mientras que el segundo elemento incorpora un sistema de visión en su extremo. Dicho elemento presenta un grado de libertad de rotación, mediante la rotación (llevada a cabo manualmente) de tUl elemento magnético exterior y un grado de libertad de inclinación, actuado mediante un motor electromagnético que se opera desde el exterior de la cavidad abdominal mediante la aplicación de campos magnéticos de intensidad y orientación variables. El cambio en la inclinación del sistema de visión supone un movimiento lineal completo del elemento móvil del dispositivo ¡ntra-abdominal, lo que implica un acercamiento del sistema de visión al área de trabajo. El dispositivo se alimenta mediante corriente eléctrica externa introducida mediante un cable, que se introduce en la cavidad abdominal a través de uno de los puertos de entrada. La necesidad de introducir un cable en la cavidad abdominal puede dificultar la maniobrabilidad del instrumental quinírgico por parte del cirujano. Resumiendo, el estado de la técnica presenta las siguientes limitaciones:
1. Los dispositivos que incorporan ·endoscopios intra-abdominales se controlan manualmente mediante manipulación directa de un elemento extra-abdominal, lo que requiere la presencia de un asistente que maneje dicho elemento.
2. La manipulación del elemento extra-abdominal mediante un brazo robótiw requiere que éste acomode su movimiento a la anatomía de la cavidad abdominal con el objeto
de no dañar al paciente ejerciendo fuerzas indeseadas sobre la pared abdominal. La
anatomía de la pared abdominal constituye un parámetro desconocido y de naturaleza
variable, no sólo entre diferentes pacientes, sino también entre diferentes puntos de la
constitución de cada paciente. En el estado de la técnica no existen dispositivos que
5 sean capaces de mover el elemento extra-abdominal acomodando su movimiento a la
anatomía de la cavidad abdominal de los pacientes.
3, No existen dispositivos que sean capaces de mover el elemento extra-abdominal
controlando y adaptando la fuerza ejercida por el mismo sobre la pared abdominal de
los pacientes.
10 4. El cambio en la inclinación del sistema de visión mediante elementos móviles (como
el presentado en WO 2012/035157) implica un acercamiento de la cámara a los
órganos, lo que reduce el campo de visión de la misma.
5. El cambio en la inclinación del sistema de visión mediante elementos móviles (como
el presentado en WO 2012/035157) requiere de un espacio de trabajo dentro de la
15 cavidad abdominal de cómo mínimo la longitud del elemento móvil, lo que puede
implicar la necesidad de introducir Wla mayor cantidad de COz en los pacientes COn
objeto de aumentar el espacio de trabajo del dispositivo.
6. No existen sistemas de visión intra··abdominales con mecanismo de orientación
activa que no impliquen la necesida.d de una fuente de alimentación externa que
2O requieren la ocupación de un puerto di: entrada con sistemas de cableado.
DESCRIPCIÓN DE LA INVENCIÓN
El presente documento describe un sistema robótico de asistencia a la cirugía
25 mínimamente invasiva, en particular, en técnicas de puerto único, sin la necesidad de
utilizar un puerto de entrada, lo que permite liberar un puerto de entrada, y capaz de
acomodar su movimiento a la anatomía de la pared abdominal, pennitiendo el
desplazamiento de un dispositivo médico" preferentemente robot intra-abdominal dotado
de un sistema de visión endoscópica. a lo largo de la pared abdominal de forma segura
3 O para el paciente.
El sistema comprende un robot , extra-abdominal, que a su vez comprende un
efector final que puede ser fijo o removible. El robot extra-abdominal comprende,
además del (i) efector final que, mediante campos magnéticos, permite posicionar y
orientar un dispositivo médico para uso iotra-abdominal; (ii) un controlador software
capaz de implementar un método para el guiado automático del dispositivo médico para
uso intra-abdominal y que permite su adaptación a la anatomía de la pared abdominal; y
(iij) un sistema interfaz de comunicación y control que permite ordenar las acciones
5 deseadas al sistema. El controlador del robot extra-abdominal es capaz de realizar el
desplazamiento del efector final siguiendo la anatomía de la pared abdominal del
paciente, de manera que se asegure un desplazamiento suave y la continuidad del acople
magnético entre el robot extra-abdominal y el robot intra-abdominal, y controlando la
fuerza ejercida sobre la mi sma, evitando posibles daños sobre el paciente. Para ello, el
10 sistema, particularmente el robot extra-abdominal, comprende un sensor de fuerza /
momento.
Más preferentemente, el sistema , :omprende además un dispositivo médico para
uso ¡ntra-abdominal, preferentemente un robot intra-abdominal, dotado de un módulo
que permite posicionar y orientar un dispositivo médico acoplado o comprendido en el
15 robot intra-abdominal, dispositivo médico consistente preferentemente en un sistema de
visión endoscópica, que puede ser, como en el caso del efector final del robot extra
abdominal, fijo o removible. El mecanismo de posicionamiento del robot intra-abdominal
se realiza mediante campos magnéticos, lo que permite el desplazamiento libre del...
Reivindicaciones:
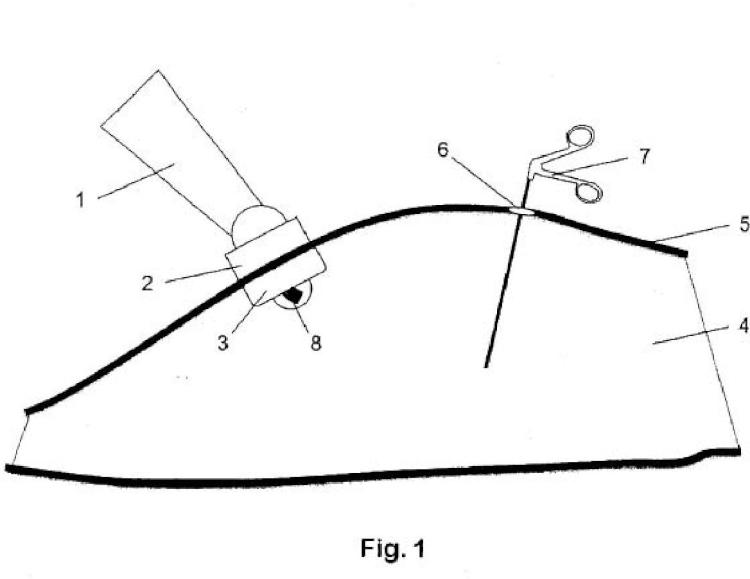
l. Sistema robótico de asistencia a la cirugía mínimamente invasiva de puerto único capaz de acomodar su movimiento a la anatomía de la pared abdominal caracterizado por comprender un robot extra-abdominal l que, a su vez, comprende un efc.::<.:tor final 2 que pc.::rmitc.:: posicionar y orientar un dispositivo médico para uso ¡ntra-abdominal mediante interacción magnética, de forma que el desplazamiento del efector final 2 determina un movimiento de igual magnitud y sentido del dispositivo médico pa:ra uso intra-abdominal.
2. Sistema según la reivindicación anterior caracterizado por comprender además un controlador software capaz de implementar un método para el guiado automático del dispositivo médico para uso íntra-abdominal y que permite su adaptación a la anatomía de la pared abdominal 5; y (iii) un sistema interfaz de comunicación y control que permite ordenar las aeciones deseadas al sistema.
3. Sistema según cualquiera de las reivindicaciones anteriores caracterizado por comprender además un sensor de fuerza I momento 50 en el extremo inferior del robot extra-abdominal 1 que permite al controlador del robot extra-abdominal realizar el desplazamiento del efector final 2 siguiendo la anatomia de la pared abdominal 5 del paciente, de manera que se asegure un desplazamiento suave y la continuidad del acople magnético entre el robot extra-abdominal l y el dispositivo para uso intra-abdominal, y controlando la fuerza ejercida sobre la misma, evitando posibles daños sobre el paciente.
4. Sistema según la reivindicación anterior caracterizado por que el sensor de fuerza / momento 50 presenta seis grados de libertad.
5. Sistema según cualquiera de las reivindicaciones 2 a 4 caracterizado por que el controlador software capaz de implementar un método para el guiado automático del dispositivo médico para uso intra-abdominal y que permite su adaptación a la anatomía de la pared abdominal 5 comprende (i) un módulo de compensación de pares que permite mantener el efector final 2 perpendicular a la pared abdominal 5 en el punto de contacto, permitiendo coincidir los sistemas de referencia del efector final 2 y de la pared abdominal 5 en el punto de contacto; y (ii) un control híbrido fuerza-posición que permite generar las consignas de movimiento del robot extra-abdominal 1 en las tres direcciones del espacio, y que permite
desacoplar el movimiento en la. dirección Z, en la que se generan las fuerzas de contacto sobre la pared abdominal 5, y en el plano X-Y, en el que se generarán las consignas de desplazamiento, dicho desacoplamiento permitiendo un desplazamiento suave del efector final 2 sobre la pared abdominal 5, asegurando una distribución de fuerzas constante en el plano X-Y, y asegurando la correcta interacción magnética entre el efector final 2 y el robot ¡otra-abdominal 3.
6. Sistema según la reivindicación anterior caracterizado por que el control híbrido fuerza-posición transforma la consigna de la fuerza que se deseada ejercer sobre la pared abdominal 5 del paciente. en una consigna de posición en la dirección Z (perpendicular a la pared abdominal 5) asumiendo un modelo de interacción elástico entre el efector final 2 y la pared abdominal 5. de constante elástica Kx. dicha trdnsfonnación oomprendiendo el cálculo la constante elástica Kx.
7. Sistema según la reivindicación anterior caracterizado por que el cálculo la constante elástica Kx se realíza haciendo uso del algoritmo de mínimos cuadrados recurrentes (que pennite actualizar el valor de dicha constante a partir de medidas de fuerza y posición del robot extra-abdominal l obtenidas durante el funcionamiento del mismo) , mediante la ecuación:
KxCt + 1) = KxCt) + R (t) (ÓFz (t + 1) -óPz (t + 1) Kx (t) )
donde Kx (t) Y Kx (t+ 1) representan el valor de la constante elástica en dos instantes de tiempo consecutivos. ófz (t + 1) representa el incremento de fuerza ohtenido por el sensor de fuerza/momento 50 en la dirección Z en el instante t+ 1 . .6.Pz (t + 1) representa el incremento de posición del robot extra-abdominal 1 en la dirección Z en el instante t+ l. y R (t) es una constante calculada mediante la expresión:
Q (t) ÓPzCt +1)
R (t) = , 1+ (ÓPzCt +1) ) Q (t)
donde Q (t) es una constante qUc~ se actualiza mediante:
Q (t + 1) = Q (t) 2 1 + (LlP, (t + 1) ) Q (t)
8. Sistema según cualquiera de las reivindicaciones 5 a 7 caracterizado por que el módulo de compensación de pares permite proporcionar una consigna de orientación que haga nulo el ángulo a (ángulo entre -i-la dirección de la fuerza ejercida por el efector final 2 sobre la pared abdominal 5, y -ii-la dirección del eje Z, proporcionada por la dirección de la fuerza obtenida mediante la lectura del sensor de fuerza/momento 50) , y por tanto los ejes ZE y Z serán paralelos, calculando para ello el valor del ángulo a como el ángulo formado entre el eje ZE (paralelo al eje Zn del robot extra-abdominal) y el vector de fuerza obtenido mediante la lectura del sensor fherza/momento 50, así como el eje de giro sobre el que se debe realizar el giro del robot extra-abdominal 1 (dicho eje de giro corresJX>ndiendose con el vector opuesto al vector de momento obtenido JX>r el sensor fuerz.a!momento 50) para colocarse en la situación perpendicular deseada.
9. Sistema según cualquiera de las reivindicaciones anteriores caracterizado JX>r que el efector final 2 comprende u:n comJX>nente 27 que permite su acoplamiento al robot extra-abdominal 1
10. Sistema según la reivindicación anterior caracterizado por que el componente 27 acopla el efector final 2 al extmmo inferior del robot extra-abdominal 1 mediante un sistema de rosca 28.
11. Sistema según cualquiera de las reivindicaciones 9 ó 10 caracterizado por que el efector final 2 comprende además un componente 34 que a su vez comprende medios de interacción magnética que permiten posicionar y orientar un dispositivo médico para uso intra-abdominal mediante interacción magnética.
12. Sistema según cualquiera de las reivindicaciones 9 a 11 caracterizado por que los componentes 27 y 34 comprenden los módulos 29 y 30, Y los módulos 35 y 36, respectivamente, que permiten su acoplamiento entre sí.
13. Sistema según la reivindicación anterior caracterizado por que el acoplamiento entre los componentes 27 y 34 es reversible, permitiendo que el componente 34
sea desplazado o rotado de forma independiente y en combinación con un dispositivo para uso intra-abdominal sin participación del resto del sistema.
14. Sistema según cualquiera de las reivindicaciones 9 a 13 caracterizado por que el componente 27 Y el componente 34 comprenden medios de interacción magnética
N" solicitud F.Efectiva F.OEPM 25/09/2014 02/10/2014
entre sí, dicho componente 27 comprendiendo un motor lineal 33 que pennite desplazar un módulo 31, dicho módulo 31 conteniendo los medios de interacción magnética comprendidos en el componente 27 que, cuando los componentes 27 y 34 están 'acoplados, penniten atraer y desplazar medios de interacción magnética comprendidos en el componente 34.
15. Sistema según la reivindicación anterior caracterizado por que los medios de interacción magnética comprendidos en los componentes 27 y 34 para su interacción entre sí consisten en un imán pennante 32 y en un imán permanente 39, respectivamente.
16. Sistema según cualquiera de las reivindicaciones 11 a 15 caracterizado por que el componente 34 comprende además medios de interacción magnética para su interacción con el dispositivo para uso intra-abdominal, dicho dispositivo comprendiendo igualmente medios de interacción magnética en correspondencia con los comprendidos en el componente 34.
17. Sistema según la reivindicación anterior caracterizado por que la interacción magnética entre el componente 34 y el dispositivo para uso ¡ntra-abdominal se realiza mediante la alineación de unos imanes pennanentes 37 y 38 con unos imanes pennanentes 16 y 17, respectivamente.
18. Sistema según cualquiera de las reivindicaciones anteriores caracterizado por 20 comprender además un dispositivo para uso intra-abdominal.
19. Sistema según la reivindicación anterior caracterizado por que el dispositivo para uso intra-abdominal consiste en un robot intra-abdominal 3 que comprende un módulo 26 que permite posicionar y orientar un dispositivo médico acoplado o comprendido en el robot intra-abdominal 3.
20. Sistema según la reivindicación anterior caracterizado por que el módulo 26 se acopla al robot intra-abdominal 3 mediante unos ejes de giro 45 y 46, Y al dispositivo médico acoplado o comprendido en el robot intra-abdominal 3 mediante unos medios de interacción magnética.
21. Sistema según la reivindicación anterior caracterizado por que los medios de interacción magnética que penniten el acoplamiento entre el módulo 26 y el dispositivo médico acoplado o comprendido en el robot ¡ntra-abdominal 3 consisten en un imán pennanente cilíndrico 43 y, en el extremo opuesto al módulo 26 de dicho imán pennanente 23, un imán pennanente esférico 44.
N" solicitud F.Efectiva F.OEPM 25/09/2014 02/10/2014
22. Sistema según la reivindicación anterior caracterizado por que cuando el componente 34 y el robot intra-abdominal 3 se encuentran acoplados magnéticamente, el imán permanente 44 queda atraído por el imán permanente 39 de forma que el desplamiento del imán permanente 39 produce un desplazamiento solidario del imán permanente 44 provocando el giro del módulo 26, y con él del dispositivo médico acoplado o comprendido en el robot ¡ntra-abdominal 3, alrededor de los ejes de giro 45 y 46.
23. Sistema según cualquiera de las reivindicaciones 19 a 22 caracterizado por que el dispositivo médico acoplado o comprendido en el robot intra-abdominal 3 es un sistema de visión endoscópica 8.
24. Sistema según la reivindicación anterior caracterizado por que el sistema de visión endoscópica 8 consiste en una cámara capaz de transmitir imágenes a un receptor exterior de forma inalámbrica.
25. Sistema según cualquiera de las reivindicaciones 23 a 24 caracterizado por que el sistema de visión endoscópica 8 está protegido por una cúpula transparente que a su vez evita daños en el paciente.
26. Sistema según cualquiera de las reivindicaciones 23 a 25 caracterizado por que el robot jntra-abdominal 3 comprende además un sistema de iluminación, medios de interacción magnética y un módulo 26 para la orientación del sistema de visión endoscópica 8 mediante interacción magnética.
27. Sistema según la reivindicación anterior caracterizado por que el sistema de iluminación comprende un cojunto de LEDs.
28. Sistema según cualquiera de las reivindicaciones 19 a 27 caracterizado por que el robot intra-abdominal 3 comprende una fuente de alimentación eléctrica mediante baterías.
29. Sistema según la reivindicación anterior caracterizado por que las baterías se activan y desactivan mediante un interruptor 19.
30. Sistema según cualquiera de las reivindicaciones 28 a 30 caracterizado por que las baterías se cargan mediante el interruptor 18.
31. Sistema según cualquiera de las reivindicaciones 5 a 30 caracterizado por que comprende un componente supervisor que se encarga de transformar las órdenes del usuario en las consignas de fuerza, desplazamiento y par deseadas; siendo dichas consignas transformadas por el control híbrido fuerza-posición y el
N" solicitud F.Efectiva F.OEPM 25/09/2014 02/10/2014
módulo de compensación de pares en consignas de posición y orientación del robot extra-abdominal 1, cuyo movimiento es solidario al movimiento del efector final 2.
32. Sistema según cualquiera de las reivindicaciones 14 a 30 caracterizado por que comprende un componente supervisor que transfonna las órdenes emitidas por el usuario y recibidas a través del sistema de interfaz, en consignas de movimiento del robot extra-abdominal 1 y consignas de movimiento del motor lineal 33.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]