VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO.
Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
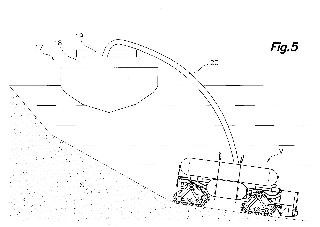
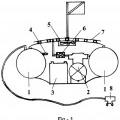
El vehículo comprende un sistema de control de flotabilidad que incluye unos tanques (5s1, 5s2, 5i1, 5i2) en conexión con unos dispositivos valvulares (Ve1, Ve2, Vs1, Vs2, Vw1, Vw2) para rellenarlos/vaciarlos de aire/agua de manera regulable, y que es un sistema automático con unos medios de detección de la fuerza, debida al peso, que unos medios de rodadura del vehículo sumergible (V) realizan contra un lecho fluvial (S), y con un sistema electrónico (16) con acceso a los valores de fuerza detectados, conectado con los dispositivos valvulares (Ve1, Ve2, Vs1, Vs2, Vw1, Vw2) y previsto para controlarlos en función de los valores de fuerza detectados.
El sistema de control de flotabilidad es aplicable al vehículo sumergible propuesto, y puede disponerse en parte en el vehículo sumergible y en parte en una localización externa al mismo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201000984.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: SITJAR CANELLAS, RAFAEL, SAURA PERISÉ,Jaume, BALLESTER PUIGGROS,Oriol, SERRATS MARQUEZ,Jordi, OLIVELLA MATUTES,Albert.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01D44/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › Recolección de la flora subacuática, p. ej. recolección de algas.
- B62D55/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00).
- B63C11/00 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
- B63G8/22 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › B63G 8/00 Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00). › Regulación de la flotabilidad por lastre de agua; Equipo de vaciado de los tanques de lastre (estabilización de buques por empleo de tanques de lastre B63B 43/06).
Fragmento de la descripción:
Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado
Sector de la técnica
La presente invención concierne, en un primer aspecto, a un vehículo sumergible motorizado con control de flotabilidad, y más particularmente a un vehículo sumergible que incorpora un sistema de control de flotabilidad automático cuyo propósito es el de evitar causar daños sobre el terreno por el que circula el vehículo.
Un segundo aspecto de la invención concierne a un sistema de control de flotabilidad de un vehículo sumergible motorizado aplicable al vehículo sumergible del primer aspecto de la invención.
Estado de la técnica anterior
Son conocidos vehículos sumergibles que incorporan sistemas de control de flotabilidad, con diversos fines, tales como el de ofrecer estabilidad de movimientos cuando éstos se sumergen o emergen del agua, o el de no ejercer una fuerza sobre el lecho fluvial con todo el peso del vehículo.
Por la patente US6017400 se conoce uno de tales vehículos sumergibles, en particular un vehículo para aspirar los sedimentos del fondo de una balsa, incluyendo pequeñas algas. El vehículo dispone de unos tanques con unas entradas conectables, de manera controlada, a una fuente de aire a presión y al agua donde se sumerge el vehículo. Mediante un control remoto manual se controla la flotabilidad del vehículo, introduciendo más o menos aire y/o agua, con el fin de que se sumerja o emerja del agua, de manera estable.
En dicha patente no se propone que una vez el vehículo contacte con el fondo de la balsa se lleve a cabo dicho control de flotabilidad para que el vehículo no disponga todo su peso sobre este fondo, ya que el objetivo no es no dañar el suelo sino sumergir y hacer emerger el vehículo de manera estable. Por otra parte en US6017400 tampoco se propone llevar a cabo un control de la flotabilidad automático.
Por la patente US692074482 se conoce un vehículo sumergible y previsto para cortar, recolectar y compactar algas, que se mueve por la tracción ejercida sobre el mismo por parte de un operario o por parte de un vehículo motorizado, tal como una barca. El vehículo lleva unas ruedas huecas con una serie de agujeros y que se llenan de más o menos aire y/o agua para controlar la flotabilidad del vehículo, con el fin de no dañar el fondo marino, de hacer que el vehículo circule por este fondo para cortar y recoger algas del mismo, o de que flote para recoger algas superficiales. Aunque se
describe el control de la flotabilidad como el llevado a cabo tapando más o menos agujeros de las ruedas vacías, también se contempla la posibilidad de utilizar un dispositivo de flotación variable, tal como unos tubos de control de flotabilidad. En la patente US692074482 sí que se indica que con el control de la flotabilidad 5 propuesto en la misma se minimiza la perturbación de la ecología del fondo marino. No se propone, en cambio, llevar a cabo dicho control de manera automática. En ninguno de dichos antecedentes se propone que el sistema de control de flotabilidad que incorporen los vehículos sumergibles propuestos en los mismos sea automático, y que actúe en función del peso ejercido por el vehículo sobre el fondo o 1 O lecho fluvial. Aparece necesario ofrecer una alternativa al estado de la técnica que cubra las carencias halladas en el mismo, en particular las relativas a la falta de sistemas de control de flotabilidad automáticos asociados a vehículos sumergibles. 15 Explicación de la invención La presente invención constituye tal alternativa al estado de la técnica, aportando una solución que supera los inconvenientes inherentes a los sistemas de control de flotabilidad manuales de las propuestas convencionales. Para ello, la presente invención concierne, en un primer aspecto, de manera en 20 sí conocida, a un vehículo sumergible motorizado con control de flotabilidad, que comprende un sistema de control de flotabilidad que incluye uno o más tanques fijados a un armazón del vehículo sumergible y unos o más dispositivos valvulares en conexión con dicho o dichos tanques para rellenarlos/vaciarlos de uno o más fluidos (tal como gas a presión) de manera regulable a través de uno o más dispositivos valvulares. 25 A diferencia de las propuestas conocidas, el sistema de control de flotabilidad del vehículo sumergible propuesto por el primer aspecto de la presente invención se caracteriza porque es un sistema automático que comprende unos medios de detección de la fuerza, debida al peso, que unos medios de rodadura del vehículo sumergible realizan contra un lecho fluvial sobre el que se sitúa, y un sistema electrónico en 30 conexión o integrando a como mínimo parte de los medios de detección, para acceder a los valores de fuerza detectados, y con dicho o dichos dispositivos valvulares, y previsto para controlarlos en función de los valores de fuerza detectados. Según un ejemplo de realización el vehículo sur:nergible propuesto por el primer aspecto de la invención es un vehículo anfibio capaz de circular por terrenos fuera y 35 dentro del agua. Para un ejemplo de realización los mencionados medios de detección comprenden uno o más sensores de fuerza dispuestos en el vehículo sumergible para detectar directamente la fuerza, debida al peso, que los medios de rodadura realizan contra el lecho fluvial, y conectados al sistema electrónico para enviarle los valores de 5 fuerza detectados. El sensor o sensores de fuerza mencionados son, para un ejemplo de realización, unas correspondientes células de carga dispuestas en los medios de rodadura, o en un soporte de los mismos, o en un elemento del sistema de tracción asociado a dichos r:nedios de rodadura. 1 O Para ün ejemplo de realización, el vehículo sumergible propuesto por la invención comprende varios sensores de fuerza previstos para detectar individualmente la fuerza que cada uno de unos elementos de rodadura de los mencionados medios de rodadura ejerce sobre el lecho fluvial. Según otro ejemplo de realización, los medios de detección comprenden una o 15 más cámaras (u otro sistema de escaneado alternativo) que enfocan a dicho lecho fluvial para adquirir imágenes de por lo menos una huella creada por los medios de rodadura, y unos medios de procesamiento que analizan dichas imágenes y en función de como mínimo la profundidad de dicha huella generan los mencionados valores de fuerza, en función de los cuales el sistema electrónico controla al dispositivo o 20 dispositivos valvulares. Para una variante de dicho ejemplo de realización, los medios de detección comprenden unos medios de iluminación adecuados (tal como unos focos sumergibles) para que la c~mara o cámaras puedan captar dichas imágenes con suficiente calidad, aunque para otra variante alternativa la cámara o cámaras están configuradas para captar imágenes infrarrojas, por lo que no necesitan de tales medios 25 de iluminación El sistema electrónico del vehículo sumergible propuesto por la invención está previsto para controlar al dispositivo o dispositivos valvulares para aumentar la flotabilidad del vehículo sumergible si la fuerza detectada está por encima de un valor máximo determinado que si se superase podría causar daños en el lecho fluvial por la 30 acción de los medios de rodadura, y comprende una o más unidades de procesamiento con acceso a los valores de fuerza detectados por los medios de detección, y una o más memorias que almacenan como mínimo valores de fuerza de referencia, con los que comparar los valores detectados. De esta manera se consigue que el vehículo sumergible pueda circular por el 35 lecho fluvial para cumplir su misión, dañando lo mínimo posible al lecho fluvial y al ecosistema incluido en el mismo. Con el mismo fin de evitar daños en el lecho fluvial, los medios de rodadura del vehículo sumergible propuesto por el primer aspecto de la invención comprenden, para unos ejemplos de realización, dos o más orugas, siendo ventajosamente alguna de ellas directriz, y con preferencia comprenden cuatro orugas, dos de las cuales son...
Reivindicaciones:
1. Vehículo sumergible motorizado con control de flotabilidad, del tipo que
comprende un sistema de control de flotabilidad que incluye al menos un tanque (5s1,
5s2, 5i1, 5i2) fijado a un armazón de dicho vehículo sumergible (V) y al menos un
dispositivo valvular (Ve 1 , Ve2, Vs1, Vs2) en conexión con dicho tanque (5s1, 5s2, 5i1,
5i2) , que es al menos uno, para rellenarlo/vaciarlo de al menos un fluido de manera
regulable, estando el vehículo caracterizado porque dicho sistema de control de
flotabilidad es un sistema automático que comprende unos medios de detección de la
fuerza, debida al peso, que unos medios de rodadura del vehículo sumergible (V)
realizan contra un lecho fluvial (8) sobre el que se sitúa, y un sistema electrónico (16)
en conexión o integrando al menos parte de dichos medios de detección, para acceder
a los valores de fuerza detectados, y con dicho dispositivo valvular (Ve1, Ve2, Vs1,
Vs2) , que es al menos uno, y previsto para controlarlo en función de los valores de
fuerza detectados.
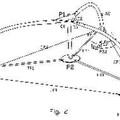
2. Vehículo según la reivindicación 1, caracterizado porque dichos medios de
detección comprenden al menos un sensor de fuerza (F) dispuesto en dicho vehículo
sumergible (V) para detectar directamente la fuerza, debida al peso, que dichos medios
de rodadura realizan contra dicho lecho fluvial (8) .
3. Vehículo según la reivindicación 1, caracterizado porque dichos medios de
detección comprenden al menos una cámara que enfoca a dicho lecho fluvial (8) para
adquirir imágenes de al menos una huella creada por dichos medios de rodadura, y
unos medios de procesamiento que analizan dichas imágenes y en función de al menos
la profundidad de dicha huella generan dichos valores de fuerza.
4. Vehículo según la reivindicación 1, caracterizado porque dicho sistema . electrónico (16) está previsto para controlar a dicho dispositivo valvular (Ve 1 , Ve2, Vs1,
Vs2) , que es al menos uno, para aumentar la flotabilidad del vehículo sumergible (V) si
la fuerza detectada está por encima de un valor máximo determinado que si se
superase podría causar daños en dicho lecho fluvial (8) por la acción de dichos medios
de rodadura.
5. Vehículo según una cualquiera de las reivindicaciones anteriores,
caracterizado porque es un vehículo anfibio capaz de circular por terrenos fuera y
dentro del agua.
6. Vehículo según una cualquiera de las reivindicaciones anteriores,
caracterizado porque dichos medios de rodadura comprenden al menos dos orugas.
7. Vehículo según la reivindicación 6, caracterizado porque dichos medios de rodadura comprenden al menos tres orugas, al menos una de ellas directriz.
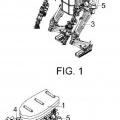
8. Vehículo según la reivindicación 7, caracterizado porque dichos medios de rodadura comprenden cuatro orugas (7a1, 7a2, 7b1, 7b2) , dos (7b1, 7b2) de las cuales
son directrices.9. Vehículo según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicho sistema electrónico (16) comprende al menos una unidad de procesamiento con acceso a los valores de fuerza detectados por dichos medios de detección, y con acceso también a al menos una memoria que almacena al menos valores de fuerza de referencia.
10. Vehículo según la reivindicación 2, caracterizado porque dicho sensor de fuerza (8f) , que es al menos uno, es una célula de carga dispuesta en dichos medios de rodadura, o en un soporte de los mismos, o en un elemento del sistema de tracción asociado a dichos medios de rodadura.
11. -Vehículo según la reivindicación 10, caracterizado porque comprende varios de dichos sensores de fuerza (8f) previstos para detectar individualmente la fuerza que cada uno de unos elementos de rodadura (7a1, 7a2, 7b1, 7b2) de dichos medios de rodadura ejerce sobre dicho lecho fluvial (8) .
12. Vehículo según una cualquiera de las reivindicaciones anteriores, caracterizado porque, aparte de a los datos referentes a dichos valores de fuerza, dicho sistema electrónico (16) tiene acceso a datos adicionales de otra índole, y porque está previsto para controlar al dispositivo valvular (Ve1, Ve2, Vs1, Vs2) , que es al menos uno, en función también de dichos datos adicionales.
13. Vehículo según la reivindicación 12, caracterizado porque dicho sistema de control de flotabilidad comprende, en conexión con el sistema electrónico (16) , al menos un sensor de movimiento (8m) dispuesto para detectar al menos el movimiento de dichos medios de rodadura, siendo los valores detectados al menos parte de dichos datos adicionales.
14. Vehículo según la reivindicación 13, caracterizado porque dicho sensor de movimiento (8m) , que es al menos uno, está previsto para detectar si al menos parte de dichos medios de rodadura patinan sobre el lecho fluvial (8) .
15. Vehículo según la reivindicación 12, 13 ó 14, caracterizado porque dicho sistema de control de flotabilidad comprende o tiene acceso a al menos una cámara (3) , en conexión con el sistema electrónico (16) , siendo las imágenes captadas por dicha cámara, que es al menos una, al menos parte de dichos datos adicionales.
16. Vehículo según la reivindicación 15, caracterizado porque dicha cámara (3) , que es al menos una, se encuentra montada en dicho vehículo sumergible (V) para captar imágenes de al menos un área exterior del mismo, siendo dichas imágenes utilizadas por el sistema electrónico (16) para averiguar si el vehículo sumergible (V) avanza o no, en qué sentido, y/o para conocer el terreno sobre el que se encuentra y detectar posibles obstáculos en la trayectoria del vehículo sumergible (V) .
17. Vehículo según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicho fluido, que es al menos uno, es aire a presión.
18. Vehículo según una cualquiera de las reivindicaciones anteriores, caracterizado porque está aplicado a la recolección de algas.
19. Vehículo según la reivindicación 18, caracterizado porque comprende un sistema de corte y recolección de algas que incluye unas hojas de corte (C1, C2) y un mecanismo de succión para succionar las algas cortadas por dichas hojas de corte (C1, C2) .
20. Vehículo según la reivindicación 19, caracterizado porque dicho mecanismo' de succión comprende al menos una bomba de succión (14) , un conducto (13) y una carcasa (8) o boca de succión acoplada a un primer extremo (13a) de dicho conducto (13) , estando las hojas de corte (C1, C2) montadas en dicha boca de succión (8) , de manera que las algas cortadas se dirijan hacia el interior de dicho conducto (13) .
21. Vehículo según la reivindicación 20, caracterizado porque un segundo extremo (13b) de dicho conducto (13) se encuentra comunicado con un sistema de al menos recolección de algas.
22. Vehículo según la reivindicación 21, caracterizado porque dicho sistema de al menos recolección de algas se encuentra ubicado, al menos en parte, sobre dicho vehículo sumergible (V) .
23. Vehículo según una cualquiera de las reivindicaciones 1 a 17, caracterizado porque está aplicado a tareas de inspección.
24. Sistema de control de flotabilidad de un vehículo sumergible motorizado, del tipo que comprende al menos un tanque (5s1, 5s2, 5i1, 5i2) fijado a un armazón de dicho vehículo sumergible (V) y al menos un dispositivo valvular (Ve 1 , Ve2, Vs1, Vs2) en conexión con dicho tanque (5s1, 5s2, 5i1, 5i2) , que es al menos uno, para rellenarlo/vaciarlo de al menos un fluido de manera regulable, estando el sistema de control de flotabilidad caracterizado porque es un sistema automático que comprende unos medios de detección de la fuerza, debida al peso, que unos medios de rodadura del vehículo sumergible (V) realizan contra un lecho fluvial (S) sobre el que se sitúa, y un sistema electrónico (16) en conexión o integrando al menos parte de dichos medios de detección, para acceder a los valores de fuerza detectados, y con dicho dispositivo valvular (Ve1, Ve2, Vs1, Vs2) , que es al menos uno, y previsto para controlarlo en función de los valores de fuerza detectados.
25. Sistema de control de flotabilidad según la reivindicación 24, caracterizado 5 porque comprende el sistema de control de flotabilidad de al menos el vehículo sumergible (V) según una cualquiera de las reivindicaciones 1 a 23.
26. Sistema de control de flotabilidad según la reivindicación 24 ó 25, caracterizado porque se encuentra dispuesto, en parte, en una localización externa a dicho vehículo sumergible (V) .
1.
27. Sistema de control según la reivindicación 26, caracterizado porque dicha localización externa está en un vehículo (17) que no es dicho vehículo sumergible (V) .
28. Sistema de control según la reivindicación 27, caracterizado porque dicho vehículo (17) que no es dicho vehículo sumergible (V) es un vehículo del grupo que comprende los siguientes vehículos: barca, tractor y camión.
1.
29. Sistema de control de flotabilidad según la reivindicación 28, caracterizado porque comprende el sistema de control de flotabilidad del vehículo sumergible (V) según la reivindicación 21, Y porque dicho sistema de al menos recolección de algas se encuentra ubicado, al menos en parte, sobre dicho vehículo no sumergible (17) .
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN, del 4 de Octubre de 2018, de FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO: Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de […]
 Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]
Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]
 Robot submarino humanoide transformable, del 26 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación […]
Robot submarino humanoide transformable, del 26 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación […]
 PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE, del 25 de Enero de 2012, de ARREDONDO DIEZ, JOSE FRANCISCO: Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base […]
PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE, del 25 de Enero de 2012, de ARREDONDO DIEZ, JOSE FRANCISCO: Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base […]
SISTEMA COMBINADO PARA EL REGISTRO Y LA CONSERVACION ARQUEOLOGICA SUBACUATICA IN SITU., del 1 de Octubre de 2005, de UNIVERSIDAD DE CADIZ: Sistema combinado para el registro y la conservación arqueológica subacuática in situ. Permite el registro documental en objetos arqueológicos subacuáticos y […]
COLECTOR SUBMARINO DE CRUDO, del 19 de Septiembre de 2011, de LAZES, RICHARD J.: Colector submarino de fluído, que comprende un contenedor y un dispositivo de posicionamiento de nave que se puede unir a una nave sumergida […]