SISTEMA Y MÉTODO DE FILTRADO MEDIANTE DESPLAZAMIENTO EN FRECUENCIA REALIMENTADO.
Sistema y método de filtrado mediante desplazamiento en frecuencia realimentado.
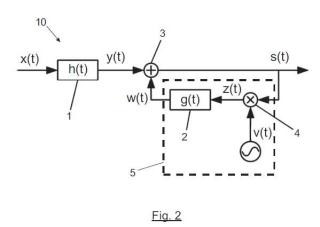
El sistema comprende un primer filtro de desplazamiento en frecuencia realimentado (10) con:
- un primer dispositivo de realimentación (5), que comprende un filtro (2) lineal e invariante en el tiempo y un mezclador (4) para conformar y desplazar en frecuencia la versión realimentada de la señal de salida s(t), obteniendo a su salida una señal w(t);
- un primer sumador (3) para sumar la señal de salida w(t) del primer dispositivo de realimentación (5) y una señal proveniente de la señal de entrada x(t);
- un primer filtro (1) lineal e invariante en el tiempo, situado antes o después del primer sumador (3), para conformar la señal proveniente de la señal de entrada x(t) y así obtener la señal de salida s(t).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231331.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: GRAJAL DE LA FUENTE,JESUS, YESTE OJEDA,Omar Artemi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H03L7/00 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03L CONTROL AUTOMATICO, ARRANQUE, SINCRONIZACION O ESTABILIZACION DE GENERADORES DE OSCILACIONES O DE IMPULSOS ELECTRONICOS (de generadores dinamoeléctricos H02P). › Control automático de frecuencia o fase; Sincronización (sintonización de circuitos resonantes en general H03J; sincronización en los sistemas de comunicación digital, ver los grupos apropiados en la clase H04).
Fragmento de la descripción:
Sistema y método de filtrado mediante desplazamiento en frecuencia realimentado SECTOR TÉCNICO
La invención se encuadra en el sector técnico de la teoría de la información y de las comunicaciones, y más concretamente en el campo de la estimación lineal de señal.
ANTECEDENTES DE LA INVENCIÓN
El filtro de Wiener cíclico es el estimador lineal óptimo de señales modeladas como procesos estocásticos cicloestacionarios.
Actualmente, el filtro de Wiener cíclico se implementa mediante filtros de desplazamiento en frecuencia (conocidos como filtros FRESH) , que son filtros lineales periódicamente variantes en el tiempo.
Los filtros de desplazamiento en frecuencia utilizan una arquitectura en la que la señal de entrada se procesa de forma paralela en diferentes ramas. En cada rama, la señal de entrada se desplaza en frecuencia y se filtra mediante un filtro lineal e invariante en el tiempo. La salida del filtro de desplazamiento en frecuencia se obtiene al sumar las salidas de todas las ramas.
El problema de los filtros de desplazamiento en frecuencia convencionales es que para llegar a obtener las mismas prestaciones en términos de error cuadrático medio que el filtro de Wiener cíclico necesitan un gran número de ramas. En el peor de los casos, el número de ramas puede llegar a ser, teóricamente, infinito. Por lo tanto, el coste computacional de tener que procesar la señal de entrada en paralelo en todas las ramas del filtro de desplazamiento en frecuencia crece ilimitadamente con el número de ramas utilizado para el filtro.
La presente invención pretende, para un mismo coste computacional, mejorar las prestaciones de los filtros de desplazamiento en frecuencia convencionales en términos de error cuadrático medio. Esta mejora proviene del hecho de que los filtros de desplazamiento en frecuencia convencionales necesitan una rama por cada ciclofrecuencia cuya correlación espectral se desee utilizar. Por el contrario, la presente invención consigue explotar un número infinito de ciclofrecuencias con un número reducido de elementos.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención se refiere a una nueva implementación de filtros lineales y periódicamente variantes en el tiempo, en la que, en lugar de desplazar en frecuencia la señal de entrada, se filtra de forma lineal e invariante en el tiempo una versión de la señal de salida desplazada en frecuencia y realimentada.
La presente invención define una nueva implementación de filtros lineales variantes en el tiempo válidos para la estimación de una señal deseada a partir de una señal de entrada. El objetivo de la invención es, dado un requisito de carga computacional, mejorar las prestaciones en términos de error de estimación de los filtros de desplazamiento en frecuencia convencionales. La principal característica novedosa se basa en la realimentación de una versión de la salida del sistema que es desplazada en frecuencia.
Un primer aspecto de la invención se refiere a un sistema de filtrado mediante desplazamiento en frecuencia realimentado, que comprende un primer filtro de desplazamiento en frecuencia realimentado con:
- un primer dispositivo de realimentación, que comprende un filtro lineal e invariante en el tiempo y un mezclador para conformar y desplazar en frecuencia (desplazamiento y conformación realizados en un orden indiferente) la versión realimentada de la señal de salida s (t) , obteniendo a su salida una señal w (t) ;
- un primer sumador para sumar la señal de salida w (t) del primer dispositivo de realimentación y una señal proveniente de la señal de entrada x (t) ;
- un primer filtro lineal e invariante en el tiempo, situado antes o después del primer sumador, para conformar la señal proveniente de la señal de entrada x (t) y así obtener la señal de salida s (t) .
En una realización preferente el primer filtro está configurado para conformar una señal proveniente de la señal de entrada x (t) y obtener una señal y (t) , estando el primer sumador configurado para sumar dicha señal y (t) con la señal de salida w (t) del primer dispositivo de realimentación para obtener la señal de salida s (t) .
En otra realización, el primer sumador está configurado para sumar la señal de entrada x (t) con la señal de salida w (t) del primer dispositivo de realimentación y obtener una señal y (t) , estando el primer filtro configurado para conformar dicha señal y (t) para obtener la señal de salida s (t) .
En una realización el mezclador del primer dispositivo de realimentación puede estar configurado para desplazar en frecuencia la versión realimentada de la señal de salida s (t) y obtener una señal z () t , estando el filtro de dicho primer dispositivo de realimentación configurado para conformar una versión de dicha señal de salida realimentada y
desplazada en frecuencia z () t y obtener la señal de salida w () t del primer dispositivo de realimentación.
En otra realización el filtro del primer dispositivo de realimentación está configurado para conformar la versión realimentada de la señal de salida s (t) y obtener una señal z () t , estando el mezclador de dicho primer dispositivo de realimentación configurado para desplazar en frecuencia dicha señal z () t y obtener la señal de salida w () t del primer dispositivo de realimentación.
El sistema puede comprender un segundo dispositivo de realimentación, que comprende un filtro lineal e invariante en el tiempo y un mezclador para conformar y desplazar en frecuencia (desplazamiento y conformación realizados en cualquier orden) la versión realimentada de la señal de salida s (t) , obteniendo a su salida una señal w2 (t) que alimenta al
primer sumador; donde la señal de oscilador local v () t de dicho mezclador es la conjugada compleja de la señal utilizada en el mezclador del primer dispositivo de realimentación.
El sistema puede comprender un primer mezclador de entrada para desplazar en frecuencia la señal de entrada x (t) ,
obteniendo la señal xL () t que alimenta al primer filtro y al primer sumador.
El sistema puede comprender adicionalmente un segundo filtro de desplazamiento en frecuencia realimentado y un segundo sumador, estando el primer y segundo filtro de desplazamiento en frecuencia realimentado configurados para filtrar en paralelo, respectivamente, la señal de entrada x (t) y su conjugada compleja, y estando el segundo sumador configurado para sumar posteriormente la salida de ambos filtros para obtener la señal de salida s (t) .
La señal del oscilador local v () t es preferentemente una sinusoide de frecuencia igual a la ciclofrecuencia fundamental,
o cualquiera de sus múltiplos, de la señal que se pretende estimar.
Otro aspecto de la invención se refiere a un método de filtrado mediante desplazamiento en frecuencia realimentado, que comprende ejecutar, mediante un primer filtro de desplazamiento en frecuencia realimentado, las siguientes etapas:
- conformar y desplazar en frecuencia (en un orden indiferente) , en una primera rama de realimentación, la versión realimentada de la señal de salida s (t) , obteniendo a su salida una señal w (t) ;
- sumar la señal de salida w (t) del primer dispositivo de realimentación y una señal proveniente de la señal de entrada x (t) ;
-conformar la señal proveniente de la señal de entrada x (t) para así obtener la señal de salida s (t) .
En una realización preferente en la etapa de conformación de la señal proveniente de la señal de entrada x (t) se obtiene una señal y (t) , la cual es sumada en la etapa de suma con la señal de salida w (t) para obtener la señal de salida s (t) .
En otra realización en la etapa de suma la señal de salida w (t) es sumada con la señal de entrada x (t) para obtener una señal y (t) , la cual es conformada en la etapa de conformación de la señal proveniente de la señal de entrada x (t) para así obtener la señal de salida s (t) .
En cualquiera de las ramas de realimentación, las etapas de conformación y de desplazamiento en frecuencia pueden realizarse en cualquier orden.
El método puede comprender conformar y desplazar en frecuencia (desplazamiento y conformación realizados en un orden indiferente) , en una segunda rama de realimentación, la versión realimentada de la señal de salida s (t) ,
obteniendo a su salida una señal w2 (t) que alimenta la etapa de suma; donde la señal de oscilador local v () t para el desplazamiento en frecuencia de la segunda rama de realimentación se obtiene tomando la conjugada compleja de la señal de oscilador local utilizada en el desplazamiento en frecuencia...
Reivindicaciones:
1. Sistema de filtrado mediante desplazamiento en frecuencia realimentado, caracterizado por que comprende un primer filtro de desplazamiento en frecuencia realimentado (10) , que a su vez comprende:
- un primer dispositivo de realimentación (5) , que comprende un filtro (2) lineal e invariante en el tiempo y un mezclador (4) para conformar y desplazar en frecuencia, en cualquier orden, la versión realimentada de la señal de salida s (t) , obteniendo a su salida una señal w (t) ;
- un primer sumador (3) para sumar la señal de salida w (t) del primer dispositivo de realimentación (5) y una señal proveniente de la señal de entrada x (t) ;
- un primer filtro (1) lineal e invariante en el tiempo, situado antes o después del primer sumador (3) , para conformar la señal proveniente de la señal de entrada x (t) y así obtener la señal de salida s (t) .
2. Sistema según la reivindicación 1, caracterizado por que el primer filtro (1) está configurado para conformar una señal proveniente de la señal de entrada x (t) y obtener una señal y (t) , estando el primer sumador (3) configurado para sumar dicha señal y (t) con la señal de salida w (t) del primer dispositivo de realimentación (5) para obtener la señal de salida s (t) .
3. Sistema según la reivindicación 1, caracterizado por que el primer sumador (3) está configurado para sumar la señal de entrada x (t) con la señal de salida w (t) del primer dispositivo de realimentación (5) y obtener una señal y (t) , estando el primer filtro (1) configurado para conformar dicha señal y (t) para obtener la señal de salida s (t) .
4. Sistema según cualquiera de las reivindicaciones 1 a 3, caracterizado por que el mezclador (4) del primer dispositivo de realimentación (5) está configurado para desplazar en frecuencia la versión realimentada de la señal de salida s (t) y
obtener una señal z () t , estando el filtro (2) de dicho primer dispositivo de realimentación (5) configurado para conformar una versión de dicha señal de salida realimentada y desplazada en frecuencia z () t y obtener la señal de salida w () t del primer dispositivo de realimentación (5) .
5. Sistema según cualquiera de las reivindicaciones 1 a 3, caracterizado por que el filtro (2) del primer dispositivo de realimentación (5) está configurado para conformar la versión realimentada de la señal de salida s (t) y obtener una señal
z () t , estando el mezclador (4) de dicho primer dispositivo de realimentación (5) configurado para desplazar en frecuencia dicha señal z () t y obtener la señal de salida w () t del primer dispositivo de realimentación (5) .
6. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende un segundo dispositivo de realimentación (5’) , que comprende un filtro (2’) lineal e invariante en el tiempo y un mezclador (4’) para conformar y desplazar en frecuencia, en cualquier orden, la versión realimentada de la señal de salida s (t) , obteniendo a
su salida una señal w2 (t) que alimenta al primer sumador (3) ; donde la señal de oscilador local v () t de dicho mezclador (4’) representa la conjugada compleja de la señal utilizada en el mezclador (4) del primer dispositivo de realimentación (5) .
7. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende un primer mezclador
de entrada (7) para desplazar en frecuencia la señal de entrada x (t) , obteniendo la señal xL () t que alimenta al primer filtro (1) y al primer sumador (3) .
8. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende adicionalmente un segundo filtro de desplazamiento en frecuencia realimentado (10’) y un segundo sumador (8) , estando el primer (10) y segundo (10’) filtro de desplazamiento en frecuencia realimentado configurados para filtrar en paralelo, respectivamente, la señal de entrada x (t) y su conjugada compleja, y estando el segundo sumador (8) configurado para sumar posteriormente la salida de ambos filtros (10, 10’) para obtener la señal de salida s (t) .
9. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado por que la señal del oscilador local v () t
es una sinusoide de frecuencia igual a la ciclofrecuencia fundamental, o cualquiera de sus múltiplos, de la señal que se pretende estimar.
10. Método de filtrado mediante desplazamiento en frecuencia realimentado, caracterizado por que comprende ejecutar, mediante un primer filtro de desplazamiento en frecuencia realimentado (10) , las siguientes etapas:
- conformar (2) y desplazar en frecuencia (4) , en cualquier orden y en una primera rama de realimentación (5) , la versión realimentada de la señal de salida s (t) , obteniendo a su salida una señal w (t) ;
-sumar (3) la señal de salida w (t) del primer dispositivo de realimentación (5) y una señal proveniente de la señal de entrada x (t) ;
- conformar (1) la señal proveniente de la señal de entrada x (t) para así obtener la señal de salida s (t) .
11. Método según la reivindicación 10, caracterizado por que en la etapa de conformación (1) de la señal proveniente de la señal de entrada x (t) se obtiene una señal y (t) , la cual es sumada (3) en la etapa de suma con la señal de salida w (t) para obtener la señal de salida s (t) .
12. Método según la reivindicación 10, caracterizado por que en la etapa de suma (3) la señal de salida w (t) es sumada con la señal de entrada x (t) para obtener una señal y (t) , la cual es conformada en la etapa de conformación (1) de la señal proveniente de la señal de entrada x (t) para así obtener la señal de salida s (t) .
13. Método sistema según cualquiera de las reivindicaciones 10 a 12, caracterizado por que comprende conformar (2’) y desplazar en frecuencia (4’) , en cualquier orden y en una segunda rama de realimentación (5’) , la versión realimentada de la señal de salida s (t) , obteniendo a su salida una señal w2 (t) que alimenta la etapa de suma (3) ; donde la señal de
oscilador local v () t para el desplazamiento en frecuencia (4’) de la segunda rama de realimentación (5’) representa la conjugada compleja de la señal utilizada en el desplazamiento en frecuencia (4) de la primera rama de realimentación (5) .
14. Método según cualquiera de las reivindicaciones 10 a 13, caracterizado por que comprende desplazar en
frecuencia (7) la señal de entrada x (t) , obteniendo la señal xL () t que alimenta la etapa de suma (3) y conformación (1) de la señal proveniente de la señal de entrada x (t) .
15. Método según cualquiera de las reivindicaciones 10 a 14, caracterizado por que comprende:
- realizar, mediante el primer filtro de desplazamiento en frecuencia realimentado (10) y mediante un segundo filtro de desplazamiento en frecuencia realimentado (10’) , el filtrado en paralelo, respectivamente, de la señal de entrada x (t) y su conjugada compleja;
- sumar posteriormente la salida de ambos filtros (10, 10’) para obtener la señal de salida s (t) .
Patentes similares o relacionadas:
Mejora de interoperabilidad entre protocolos de radio de un dispositivo multimodo, del 29 de Abril de 2020, de Nokia Technologies OY: Un dispositivo multirradio caracterizado por que comprende: medios para buscar en una memoria al menos una función de conversión predeterminada, en el […]
Aparato para reducir la degradación en el rendimiento provocada por el acoplamiento, del 2 de Noviembre de 2018, de Nokia Technologies OY: Un aparato que comprende: a modulador (9, 9I, 9Q) que comprende una primera entrada para recibir una senal de datos (27, 27I, 27Q) y una segunda entrada para […]
Estabilización de frecuencia de un oscilador de referencia, del 30 de Noviembre de 2016, de Nokia Technologies OY: Un método para estabilizar la frecuencia de un oscilador de referencia basado en MEMS (Sistemas Micro Electro Mecánicos), caracterizado por que el oscilador de […]
Concordancia de una frecuencia resonante de una cavidad resonante con una frecuencia de un voltaje de entrada, del 7 de Septiembre de 2016, de Mevion Medical Systems, Inc: Un sincrociclotrón, que comprende: unos toroides magnéticos (6a, 6b) que definen una cavidad resonante ; una fuente para proporcionar voltaje […]
Método y sistema para controlar y estabilizar la frecuencia de una señal generada por un oscilador controlable, del 7 de Enero de 2015, de Onetastic S.r.L: Método para controlar y estabilizar en tiempo, cuando cambia la temperatura, la frecuencia de una señal generada por un oscilador controlable , comprendiendo […]
Dispositivo de restauración de datos de reloj, del 5 de Noviembre de 2014, de Thine Electronics, Inc: Un dispositivo de restauración de datos de reloj, que restaura la señal y los datos de reloj sobre la base de una señal digital introducida, […]
 Dispositivo de oscilador, sistema de comunicación y procedimientos de control asociados, del 13 de Agosto de 2014, de SAGEMCOM BROADBAND SAS: Sistema de comunicación, que comprende:
- un oscilador , para la generación de una frecuencia de reloj,
- unos medios de calentamiento del oscilador ,
- […]
Dispositivo de oscilador, sistema de comunicación y procedimientos de control asociados, del 13 de Agosto de 2014, de SAGEMCOM BROADBAND SAS: Sistema de comunicación, que comprende:
- un oscilador , para la generación de una frecuencia de reloj,
- unos medios de calentamiento del oscilador ,
- […]
DISPOSITIVO DE CIRCUITO Y PROCEDIMIENTO PARA MEDIR LA FLUCTUACIÓN DE RELOJ, del 5 de Octubre de 2011, de QUALCOMM INCORPORATED: Un procedimiento para detectar una parte deseada de una señal de reloj para determinar una fluctuación de reloj, que comprende: recibir […]