Dispositivo de posicionamiento controlado por cables.
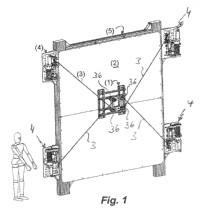
Una dispositivo de posicionamiento que comprende una plataforma (1 ) permanentemente apoyada sobre una superficie de trabajo (2) controlada a través de cuatro cables (3),
donde el primer extremo de cada cable (3) se encuentra unido a un mecanismo (4) de recogida y liberación de cable (4) que controla la longitud y tensión del mismo y el otro extremo del cable -3- se amarra a mecanismos de amarre (36) de la plataforma (1 ) para tirar de la misma, siendo los mecanismos de amarre (36) giratorios perpendicular y paralelamente a la superficie de trabajo (2) y extendiéndose cada cable (3) oblicuamente con respecto a la superficie de trabajo (2) desde su mecanismo de amarre (36) hacia su mecanismo de recogida y liberación de cable (4), de forma que la tracción de los cables (3) mueve la plataforma (1 ) controladamente por la superficie de trabajo (2) y fuerza la base de apoyo de la plataforma (1 ) contra la misma.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2010/070355.
Solicitante: FUNDACION TECNALIA RESEARCH & INNOVATION.
Nacionalidad solicitante: España.
Inventor/es: COLLADO JIMENEZ, VALENTIN, GUSTAVSSON,LARS, CULLA IRASTORZA,DAVID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/00 B25J […] › Manipuladores de control programado.
PDF original: ES-2484095_T3.pdf
Fragmento de la descripción:
E10734765
DESCRIPCIÓN
Dispositivo de posicionamiento controlado por cables Campo técnico de la invención La presente invención se encuadra en el campo técnico de los dispositivos robotizados que permiten el posicionamiento de actuadores, manipuladores, útiles, herramientas, etc. para actividades de producción, manipulación, modificación, inspección, etc. sobre una superficie de trabajo o el medio que la rodea.
Antecedentes de la invención Es conocida la necesidad actual de automatizar procesos con el objeto de reducir costes y aumentar la producción así como la eficiencia de cada proceso. Los robots actuales, tanto aquellos basados en cinemática paralela como en cinemática serie, están formados por una serie de estructuras y actuadores mecánicos con unas dimensiones fijas, lo que limita el alcance de su espacio de trabajo al máximo que sus articulaciones y estructuras puedan alcanzar. Los espacios de trabajo mayores requieren estructuras mayores, más pesadas, menos dinámicas y que conllevan un sobredimensionamiento de actuadores, lo que finalmente encarece y dificulta la automatización de piezas de grandes dimensiones.
Para resolver esos inconvenientes, se han ideado sistemas que permiten aumentar, de manera económica, el alcance de los robots mediante la sustitución de parte de la estructura de los robots por cables y utilizando una superficie de soporte. El espacio de trabajo disponible pasa a ser tan grande como la longitud del cable permita. Además, al reducir el tamaño estructural de un robot, se reduce su peso y se obtiene una máquina con mayor capacidad dinámica. Técnicamente, los cables presentan el inconveniente de trabajar únicamente a tracción, por lo que controlar los grados de libertad de un mecanismo ante cualquier excitación externa o interna no resulta tan evidente. Un actuador mecánico tradicional puede trabajar a tracción y a compresión, mientras que el cable sólo puede hacer lo primero. Para controlar completamente n grados de libertad hacen falta al menos n+1 cables dispuestos de una manera específica y adecuada en cada aplicación. Por lo tanto, el hecho de que los cables no trabajen a compresión implica que el espacio de trabajo resultante ya no es tan evidente, requiere un estudio más detallado y no siempre es posible alcanzar una determinada posición y orientación del elemento controlado por los cables. De manera general, el conjunto de puntos válidos en una cinemática de cables dependerá del número de cables y de su disposición geométrica. Se entiende por puntos válidos aquellos que permitan controlar todos los grados de libertad del mecanismo sin que los cables entren a trabajar a compresión. Además, los cables presentan problemas de interferencias entre ellos y el medio circundante, por lo que es necesario verificar dichas interferencias y comprobarlas a lo largo del espacio de trabajo.
Los documentos US-4932210, WO95/23053 y CN-101602209 describen robots suspendidos por cables con dispositivos de posicionamiento de cables, que resultan complejos tanto en cuanto a su estructura como en cuanto al guiado de los cables, que resulta susceptible de interferencia entre los cables y con el espacio de trabajo. Además requieren un número elevado de motores y una estructura de soporte asociada de gran tamaño. Por otra parte, los documentos JP-3600905 y JP-2030476 describen robots desplazables por cables para trabajar en superficies que presentan limitaciones en cuanto al control de los grados de libertad ante excitaciones externas para los puntos delimitados dentro del espacio de trabajo, debido a que todos los documentos de patente hacen referencia a un número de cables insuficiente y todos los cables están contenidos en un mismo plano. Para intentar mitigar esta inestabilidad, en el documento CN-101554892 se propone un ventilador que se utiliza para mantener una plataforma móvil posicionada sobre la superficie. Sin embargo, la estabilidad que proporciona el efecto de tal ventilador no es tan eficaz como sería deseable en aplicaciones más demandantes desde el punto de vista de vibraciones y esfuerzos (taladrado, pulido, corte, pintado, etc.) y, asimismo, la existencia del ventilador supone la presencia de un elemento adicional a controlar. El documento JP-62117653 divulga un pedestal de trabajo que puede desplazarse mediante cables en una superficie de pared. El pedestal se empuja contra la pared mediante los cables, pero solo tiene dos grados de libertad durante el desplazamiento.
A la vista de lo anterior, era deseable desarrollar un sistema de posicionamiento que superara los inconvenientes de los sistemas del estado de la técnica.
Descripción de la invención La presente invención tiene por objeto superar los inconvenientes del estado de la técnica más arriba detallados, mediante un dispositivo de posicionamiento controlado por cables que comprende cuatro cables conectados por sus respectivos primeros extremos en respectivos mecanismos de amarre de una plataforma y por sus respectivos segundos extremos en sendos mecanismos de recogida y liberación de cable (que pueden estar dispuestos por parejas diagonalmente opuestas) y accionados por sendos motores para desplazar la plataforma con respecto a una superficie de trabajo mediante la liberación y recogida controlada de los cables, que se caracteriza por que la plataforma presenta una base de soporte provista de medios de deslizamiento sobre la superficie de trabajo (por ejemplo, mediante elementos de rodadura o elementos de deslizamiento sin contacto mediante la creación de
E10734765
campos magnéticos) ; al menos uno de los cables se extiende oblicuamente entre un primer plano paralelo, en el que está dispuesto el mecanismo de recogida y liberación de cable, a la superficie de trabajo y un segundo plano paralelo a la superficie de trabajo en el que se encuentra el mecanismo de amarre de tal forma que la fuerza de tracción ejercida en los citados cables por los mecanismos de liberación y recogida de cable presenta una resultante, con una componente perpendicular a la superficie de trabajo que empuja la base de soporte de la plataforma contra la superficie de trabajo y una componente paralela a la superficie de trabajo que produce el deslizamiento de la base de soporte sobre la superficie de trabajo.
De acuerdo con la invención, cada mecanismo de amarre está ubicado a una distancia de la base de soporte provista de elementos de rodadura de la plataforma, de manera que cada cable se extiende oblicuamente con respecto a la superficie de trabajo entre el mecanismo de amarre y el mecanismo de recogida y liberación de cable a los que está conectado. Además, cada mecanismo de amarre es giratorio perpendicular y paralelamente con respecto a la base de soporte y puede ser una junta de tipo cardan. Los mecanismos de amarre comprenden una primera pareja de mecanismos de amarre dispuestos en una primera fila y conectados a sendos cables de una primera pareja de cables, y una segunda pareja de mecanismos de amarre dispuestos en una segunda fila y conectados a sendos cables de una segunda pareja de cables, de manera que cada cable conectado a un mecanismo de amarre de dicha primera fila se cruza con un cable conectado a un mecanismo de amarre de dicha segunda fila, de forma que la tracción de los cables por los respectivos mecanismos de recogida y liberación de cable fuerza la base de soporte de la plataforma contra la superficie de trabajo.
La presente invención es útil como plataforma robotizada de cinemática paralela controlada mediante cables y a través del soporte sobre la superficie de trabajo. La plataforma se desplaza manteniendo su equilibrio en todo momento sobre dicha superficie de soporte variando las longitudes y las tensiones de los cables. Al poder variarse la longitud de cada uno de los cuatro cables, estos se enrollan o liberan según corresponda. Una vez alcanzada, la plataforma puede prepararse para realizar cualquier tipo de operación sobre la superficie. Para ello, puede ser necesario aumentar la tensión de los cables a fin de aumentar la componente resultante contra la superficie de trabajo y aumentar la rigidez del mecanismo.
La plataforma dispone de espacio suficiente en su interior como para montar un actuador o manipulador adicional sobre ella (no presente en los dibujos que acompañan la presente memoria descriptiva) que se encarga de realizar cualquier tipo de actividad de producción, manipulación, modificación, inspección, etc. sobre la superficie de trabajo o el medio que la rodee. El control de tal actuador o brazo robótico adicional puede realizarse mediante un cable umbilical o incluso utilizando los propios cables de desplazamiento de la plataforma. Por lo tanto, la presente invención posibilita... [Seguir leyendo]
Reivindicaciones:
E10734765
1. Dispositivo de posicionamiento controlado por cables (3) que comprende cuatro cables conectados por sus respectivos primeros extremos en respectivos mecanismos de amarre (36) de una plataforma (1) y por sus respectivos segundos extremos en sendos mecanismos de recogida y liberación de cable (4) y accionados por sendos motores (10) para desplazar la plataforma (1) con respecto a una superficie de trabajo (2) mediante la liberación y recogida controlada de los cables (3) , caracterizado por que la plataforma (1) tiene una base de soporte (35) provista de medios de deslizamiento (6) sobre la superficie de trabajo (2) ; al menos uno de los cables (3) se extiende oblicuamente entre un primer plano paralelo a la superficie de trabajo (2) , en el que está dispuesto el mecanismo de recogida y liberación de cable (4) , y un segundo plano paralelo a la superficie de trabajo (2) en el que se encuentra el mecanismo de amarre (36) , de tal forma que la fuerza de tracción ejercida en los citados cables (3) por los mecanismos de liberación y recogida de cable (4) tiene una resultante, con una componente perpendicular a la superficie de trabajo (2) que empuja la base de soporte (35) de la plataforma (1) contra la superficie de trabajo (2) y una componente paralela a la superficie de trabajo (2) que provoca el deslizamiento de la base de soporte (35) sobre la superficie de trabajo (2) ;
caracterizado por que cada mecanismo de amarre (36) se ubica a una distancia tal de la base de soporte (35) que cada cable (3) se extiende oblicuamente con respecto a la superficie de trabajo (2) entre el mecanismo de amarre (36) y el mecanismo de recogida y liberación de cable (4) al que está conectado; los mecanismos de amarre (36) comprenden una primera pareja de mecanismos de amarre (36) dispuestos en una primera fila y conectados a sendos cables (3) de una primera pareja de cables, y una segunda pareja de mecanismos de amarre (36) dispuestos de una segunda fila y conectados a sendos cables (3) de una segunda pareja de cables; cada cable (3) conectado a un mecanismo de amarre (36) de dicha primera fila se cruza con un cable (3) conectado a un mecanismo de amarre (36) de dicha segunda fila, de manera que la tracción de los cables (3) por parte de los respectivos mecanismos de recogida y liberación de cable (4) fuerza la base de soporte (35) de la plataforma (1) contra la superficie de trabajo (2) .
2. Dispositivo de posicionamiento de acuerdo con la reivindicación 1, caracterizado por que los mecanismos de amarre (36) de la primera fila de dicha base de soporte están localizados perpendicularmente a una distancia mayor que los mecanismos de amarre (36) de la segunda fila.
3. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones 1 y 2, caracterizado por que la plataforma (1) comprende una base inferior (35) que comprende la base de soporte y una base superior (34) en la que están dispuestos los mecanismos de amarre (36) : y medios de conexión (37) para unir la base inferior (35) con la base superior (34) .
4. Dispositivo de posicionamiento de acuerdo con la reivindicación 3, caracterizado por que la plataforma superior
(34) presenta un contorno mayor que la plataforma inferior (35) .
5. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones 1 a 3, caracterizado por que el mecanismo de amarre (36) de cada cable (3) es una junta de tipo cardan.
6. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que cada mecanismo de recogida y liberación de cable (4) comprende un dispositivo orientador (7) , un dispositivo de husillo (8) y un dispositivo de almacenamiento de cable (9) , y por que el dispositivo de almacenamiento de cable (9) comprende un tambor (28) para enrollar y desenrollar el cable (3) girando en un eje de tambor (31) ; el dispositivo de husillo (8) comprende un carro (25) que se desplaza linealmente a lo largo de un eje de husillo (24) guiando el cable (3) para que avance a una distancia correspondiente al ancho de una espira del tambor (28) cuando el cable (3) va enrollándose o desenrollándose gradualmente en el tambor (28) ; el dispositivo orientador (7) orienta el cable (3) hacia el dispositivo de husillo (8) y comprende una pareja de rodillos de entrada (14) entre los que se desplaza el cable (3) hacia la plataforma (1) , estando montados los rodillos de entrada en un brazo giratorio (15) que gira coplanariamente a la superficie de trabajo (2) en función de la posición del cable (3) .
7. Dispositivo de posicionamiento de acuerdo con la reivindicación 6, caracterizado por que el eje de tambor (31) y el eje del husillo (24) son paralelos; el tambor (28) está conectado al motor (10) ; el eje (31) del tambor (28) y el eje del husillo (24) están provistos de sendos engranajes (11, 12) dispuestos de manera que el eje (3) del tambor (28) confiere movimiento de rotación al husillo (24) ; el dispositivo orientador (7) comprende una polea mayor (18) que gira en un eje perpendicular al eje del husillo (24) y redirige el cable (3) hacia el dispositivo de husillo (8) en paralelo al eje del husillo (24) ; el dispositivo de husillo (8) comprende una guía lineal auxiliar (26) paralela al eje del husillo (24) , el carro (25) comprende un cuerpo deslizante (25b) que se desliza sobre la guía lineal auxiliar (26) cuando el carro
(25) avanza en el eje del husillo, y una polea desviadora (27) que direcciona el cable (3) perpendicularmente hacia el eje (31) del tambor (28) .
E10734765
8. Dispositivo de posicionamiento de acuerdo con la reivindicación 7, caracterizado por que la polea mayor (18) está dispuesta en un brazo lateral (25a) que conecta el carro (25) con el cuerpo deslizante (25b) .
9. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones 6 a 8, caracterizado por que el
brazo giratorio (15) del dispositivo orientador (7) está conectado a un eje de giro (16) que transmite sus movimientos de giro a un codificador rotatorio (17) .
10. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones 6 a 9, caracterizado por que el brazo giratorio (15) y la polea mayor (18) están montados en respectivos ejes de giro pasivo (20) de un mecanismo de giro pasivo (19) que permiten el giro del brazo giratorio (15) y de la polea mayor (18) en un eje coaxial con el eje del husillo (24) .
11. Dispositivo de posicionamiento de acuerdo con la reivindicación 9, caracterizado por que el mecanismo de giro pasivo (19) está conectado a un codificador rotatorio (22) que determina el giro del brazo giratorio (15) y de la polea 15 mayor (18) en dicho eje coaxial.
12. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones 6 a 11, caracterizado por que el tambor (28) está conectado al motor (10) a través de una reductora (32) .
13. Dispositivo de posicionamiento de acuerdo con cualquiera de las reivindicaciones 6 a 12, caracterizado por que el dispositivo orientador (7) , el dispositivo de husillo (8) y el dispositivo de almacenamiento de cable (9) están montados en una base de soporte (13) común.
14. Dispositivo de posicionamiento de acuerdo con una de las reivindicaciones anteriores, caracterizado por que los mecanismos de liberación y recogida de cable (4) están montados en una estructura auxiliar (5) que rodea al menos parte de la superficie de trabajo (2) .
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]