Un procedimiento para la selección de las velocidades durante la conducción de un vehículo en una condición de conducción en pendiente pronunciada.
Un procedimiento para la selección de velocidades durante la conducción de un vehículo en una condición de conducción en pendiente pronunciada,
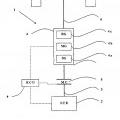
dicho vehículo comprendiendo un motor (1) con un árbol de salida del motor conectado a una transmisión mecánica automática (9), un árbol de salida de la trasmisión conectado a por lo menos una rueda accionada del vehículo, por lo menos un conjunto de control (45) para recibir señales de entrada que incluyen señales indicativas de:
- la relación acoplada de dicha transmisión,
- el desplazamiento del control del gas (48) para el momento de torsión del motor requerido,
- por lo menos una de la velocidad del vehículo, la velocidad giratoria de dicho motor y la velocidad giratoria de dicho árbol de entrada,
y para el procesamiento de dichas señales según reglas lógicas programadas para emitir señales de salida de mandato a dicho motor (1) para el control del motor y a dicha transmisión (9) para el cambio de velocidades, cuando se detecta una condición de conducción en pendiente pronunciada se determina una velocidad objetivo para dicha condición de conducción en pendiente, dicha velocidad objetivo siendo la velocidad más alta posible con la relación de velocidades más baja posible en la que el vehículo, a la vista de por lo menos las circunstancias actuales, será capaz por lo menos teóricamente de mantener una velocidad constante del vehículo o acelerarlo por lo menos ligeramente, caracterizado porque una selección adicional de cambios hacia abajo en una secuencia de cambios hacia abajo estará adaptada de modo que una velocidad inferior a dicha velocidad objetivo no sea seleccionada y acoplada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2005/001892.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: ERIKSSON, ANDERS, BERGLUND,SIXTEN, LINDGREN,ANDERS, TEMPLIN,Peter.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H59/66 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 59/00 Entradas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión. › Estado de la carretera, p. ej. cuesta, firme resbaladizo.
- F16H61/02 F16H […] › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › caracterizadas por las señales utilizadas.
PDF original: ES-2472702_T3.pdf
Fragmento de la descripción:
Un procedimiento para la selecciïn de las velocidades durante la conducciïn de un vehïculo en una condiciïn de conducciïn en pendiente pronunciada 5 CAMPO TïCNICO DE LA INVENCIïN
La presente invenciïn se refiere a un procedimiento para identificar automïticamente en las condiciones de conducciïn en pendientes pronunciadas y seleccionar las relaciones de velocidades apropiadas en un vehïculo pesado con una transmisiïn mecïnica automïtica.
La invenciïn tambiïn se refiere a un programa de ordenador para llevar a cabo dicho procedimiento.
TïCNICA ANTERIOR
Las transmisiones automïticas del tipo de transmisiones mecïnicas automïticas (AMT) se han convertido de forma creciente en comunes en los vehïculos pesados a medida que la tecnologïa de los micro ordenadores ha continuado avanzando y lo ha hecho posible, con un ordenador de control y una serie de elementos de control, por ejemplo servomotores, para controlar con precisiïn la velocidad del motor, la conexiïn y la desconexiïn de un embrague automïtico entre el motor y la caja de velocidades y elementos de acoplamiento de la caja de velocidades, unos con relaciïn a los otros, de modo que un cambio de velocidades suave siempre se obtenga a las revoluciones de la velocidad correctas. La ventaja con este tipo de transmisiïn automïtica comparada con una transmisiïn automïtica tradicional basada en un conjunto de engranajes planetarios y con un convertidor del momento de torsiïn hidrodinïmico en el lado de la entrada es en primer lugar que, particularmente con respecto a la utilizaciïn en los vehïculos pesados, es mïs simple y mïs resistente y puede ser fabricada a un coste sustancialmente inferior y en segundo lugar que tiene un rendimiento mayor, lo cual significa la perspectiva de un consumo inferior de combustible.
Las transmisiones mecïnicas automïticas del tipo mencionado antes en este documento reducen en gran medida el trabajo del cambio de velocidades de los conductores y el conductor generalmente no necesitarï preocuparse de la selecciïn de la relaciïn de velocidades siguiente correcta cuando conduce el vehïculo. Todo esto estï a cargo de la transmisiïn mecïnica automïtica. Incluso aunque las transmisiones mecïnicas automïticas generalmente estïn programadas con estrategias de cambio de velocidades que proporcione una selecciïn de la velocidad satisfactoria para una gran cantidad de situaciones totales de conducciïn del vehïculo, todavïa pueden ocurrir situaciones en las que la selecciïn de las velocidades no sea ïptima y, en algunos casos particulares esto puede conducir a una situaciïn difïcil para el conductor y el vehïculo incluso puede llegar a detenerse y se incapaz de volver a arrancar. Esto puede ser debido a la limitada fricciïn en las ruedas motrices.
Un ejemplo de una situaciïn de este tipo es cuando un vehïculo cargado pesadamente es conducido en una condiciïn de conducciïn en pendiente pronunciada. Generalmente la adaptaciïn continua de la selecciïn automïtica de velocidades cuando se conduce se basa en mapas de cambios de velocidades previamente determinados, en donde se utilizan la posiciïn del pedal del acelerador y la velocidad del motor. Los mapas de cambio de velocidades comïnmente se ponen a punto para conseguir una velocidad del motor adecuada despuïs de completar el cambio de velocidades. El sistema de transmisiïn mecïnica automïtica simplemente intenta 45 seleccionar una velocidad que sea la mejor para una situaciïn particular. En este contexto se debe mencionar que algunos sistemas de transmisiones mecïnicas automïticas segïn el estado de la tïcnica seleccionan la mejor velocidad ïnicamente sobre la base de las circunstancias actuales. Existen tambiïn sistemas de transmisiones mecïnicas automïticas con diferentes clases de funciones predictivas para una selecciïn de la velocidad mejorada, lo cual significa que se pueden predecir diversas etapas de cambio de velocidades futuras, esto es una secuencia de cambio de velocidades.
Esto significa que cuando un vehïculo pesado empieza a subir una carretera en pendiente detectando la resistencia incrementada al desplazamiento, la estrategia del cambio de velocidades programada tïpicamente harï que la transmisiïn mecïnica automïtica cambie hacia abajo un cierto nïmero de etapas de velocidades dependiendo de la 55 potencia de tracciïn actual y la aceleraciïn (esto es, en un estado en pendiente generalmente frenado) .
A medida que el vehïculo se desplaza adicionalmente y la inclinaciïn de la pendiente aumenta y la resistencia al desplazamiento aumenta incluso mïs, la estrategia de cambio harï que la transmisiïn mecïnica automïtica cambie hacia abajo algunas etapas mïs de velocidades y se acople una de las relaciones de velocidades mïs altas de la transmisiïn mecïnica automïtica. Esta relaciïn de velocidades altas seleccionada se basa en los mapas de cambios de velocidades previamente determinados.
Para una inclinaciïn determinada de carretera existe una relaciïn de velocidades mïs inferior, en la que el vehïculo es capaz de subir la inclinaciïn de la carretera. Si el sistema de transmisiïn mecïnica automïtico despuïs de un 65 cambio hacia abajo termina en una relaciïn de velocidades mïs alta que dicha relaciïn de velocidades mïs baja, la velocidad del vehïculo serï inferior a la necesaria, lo cual significa un consumo de combustible incrementado y una velocidad promedio disminuida. La baja velocidad del vehïculo puede causar incluso un atasco de trïfico. Otra desventaja de esta situaciïn es que existe un alto riesgo de que las ruedas accionadas del vehïculo patinen, debido al vehïculo pesado, una relaciïn de velocidades alta y por lo tanto un momento de torsiïn de salida alto. El patinaje puede ocurrir incluso cuando el vehïculo sea conducido por una superficie de asfalto seco. Si una o mïs de las ruedas accionadas empiezan a patinar, el riesgo de una detenciïn completa en la mitad de la pendiente empinada es alto. Si el vehïculo se detiene debido al patinaje, el conductor tendrï un problema para arrancar. Las ruedas accionadas patinarïn, cuando intente arrancar, lo cual significa que el conductor tendrï que invertir el vehïculo hacia abajo de la pendiente empinada.
Un ejemplo tïpico de un vehïculo puede ser un camiïn con un trïiler con un peso bruto del tren de por ejemplo 60 t. El camiïn por ejemplo puede estar equipado con una transmisiïn mecïnica automïtica con 14 velocidades de avance (las dos velocidades mïs bajas pueden ser velocidades de arrastre) del tipo revelado por ejemplo en el documento WO 02/064996.
La figura 1 muestra esquemïticamente una carretera en pendiente empinada tïpica, por ejemplo con una inclinaciïn del 15% y una longitud de aproximadamente 150 metros a partir de la posiciïn horizontal A a la posiciïn horizontal elevada B. El conductor incrementarï ligeramente el presionado del pedal del acelerador instalado en el camiïn de 60 t cuando el conductor vea que se aproxima la pendiente empinada, solicitando de este modo mïs momento de torsiïn.
Una estrategia tïpica de cambio de velocidades del estado de la tïcnica para dicho camiïn de 60 t realizarïa un cambio como sigue cuando pase de la posiciïn A con una velocidad del vehïculo de 35 km/h y la 6ï velocidad acoplada. En el punto C el vehïculo detecta la inclinaciïn de la carretera y el frenado. Esto inicia un cambio hacia abajo. Puesto que el vehïculo es pesado, la carretera es empinada y el frenado relativamente elevado, la estrategia de cambio programada harï el cambio hacia abajo de la transmisiïn mecïnica automïtica de mïs de una etapa. En este caso tïpicamente cambiarï hacia abajo desde la velocidad 6 a la velocidad 4. El cambio de dos etapas hacia abajo garantiza que la transmisiïn mecïnica automïtica no "perderï" una velocidad seleccionada debido al alto frenado durante la interrupciïn del momento de torsiïn de accionamiento causado por el desacoplamiento del motor del vehïculo y las ruedas accionadas del vehïculo (causada por ejemplo por el desacoplamiento del embrague o por poner la transmisiïn mecïnica automïtica en neutro) . La 4ï velocidad seleccionada se acopla con ïxito, pero el frenado del vehïculo continïa.
Una velocidad se perderï si una velocidad seleccionada, que la transmisiïn mecïnica automïtica intente acoplar, no puede ser acoplada. Puede ser a una velocidad elevada (esto es a una relaciïn de velocidades bajas) para la velocidad actual del vehïculo. El alto frenado del vehïculo durante el cambio de velocidades puede ser la razïn para que no sea posible acoplar la velocidad. Una velocidad perdida bajo estas circunstancias podrïa conducir a una detenciïn del vehïculo.
En la posiciïn C se inicia un cambio... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para la selecciïn de velocidades durante la conducciïn de un vehïculo en una condiciïn de conducciïn en pendiente pronunciada, dicho vehïculo comprendiendo un motor (1) con un ïrbol de salida del
motor conectado a una transmisiïn mecïnica automïtica (9) , un ïrbol de salida de la trasmisiïn conectado a por lo menos una rueda accionada del vehïculo, por lo menos un conjunto de control (45) para recibir seïales de entrada que incluyen seïales indicativas de:
-la relaciïn acoplada de dicha transmisiïn, 10
- el desplazamiento del control del gas (48) para el momento de torsiïn del motor requerido,
- por lo menos una de la velocidad del vehïculo, la velocidad giratoria de dicho motor y la velocidad giratoria de dicho ïrbol de entrada,
y para el procesamiento de dichas seïales segïn reglas lïgicas programadas para emitir seïales de salida de mandato a dicho motor (1) para el control del motor y a dicha transmisiïn (9) para el cambio de velocidades, cuando se detecta una condiciïn de conducciïn en pendiente pronunciada se determina una velocidad objetivo para dicha condiciïn de conducciïn en pendiente, dicha velocidad objetivo siendo la velocidad mïs alta posible con la relaciïn de velocidades mïs baja posible en la que el vehïculo, a la vista de por lo menos las circunstancias actuales, serï capaz por lo menos teïricamente de mantener una velocidad constante del vehïculo o acelerarlo por lo menos ligeramente, caracterizado porque una selecciïn adicional de cambios hacia abajo en una secuencia de cambios hacia abajo estarï adaptada de modo que una velocidad inferior a dicha velocidad objetivo no sea seleccionada y acoplada.
2. El procedimiento segïn se reivindica en la reivindicaciïn 1 caracterizado porque el registro de dicha condiciïn de conducciïn en pendiente pronunciada es un resultado de por lo menos la detecciïn de la inclinaciïn de la carretera actual, la velocidad actual del vehïculo, la posiciïn de control del gas actual y el peso bruto del vehïculo.
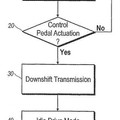
5. El procedimiento segïn la reivindicaciïn anterior caracterizado porque el establecimiento de dicha condiciïn de que ya no se desea subir la pendiente es un resultado de detectar una liberaciïn por lo menos parcial o completa de dicho control del gas (48) .
6. El procedimiento segïn la reivindicaciïn anterior caracterizado porque dicha liberaciïn por lo menos parcial
del control del gas (48) es por lo menos un desplazamiento del 15% del desplazamiento total del control del gas (48) . 45
7. El procedimiento segïn se reivindica en la reivindicaciïn 1 caracterizado porque cuando el conjunto de control (45) durante una condiciïn de conducciïn en pendiente pronunciada detecta un cambio de la condiciïn de pendiente pronunciada la selecciïn de dicha velocidad objetivo tanto se actualiza como se cancela de acuerdo con ello.
8. Un programa de ordenador que comprende un cïdigo de programa para ejecutar el procedimiento segïn se reivindica en la reivindicaciïn 1, cuando dicho programa de ordenador es ejecutado en un ordenador.
9. Un producto de programa de ordenador que comprende un cïdigo de programa, almacenado en un medio
legible por ordenador, para la ejecuciïn del procedimiento segïn se reivindica en la reivindicaciïn 1, cuando dicho programa de ordenador es ejecutado en el ordenador.
10. Un producto de programa de ordenador que que se puede cargar directamente dentro de una memoria interna en un ordenador, producto de programa de ordenador el cual comprende un programa de ordenador para la 60 ejecuciïn del procedimiento segïn se reivindica en la reivindicaciïn 1, cuando dicho programa de ordenador en el producto de programa de ordenador es ejecutado en el ordenador.
Nïmero Relaciïn de velocidad de velocidades
Patentes similares o relacionadas:
Dispositivo de control de cambio de marcha automático de vehículo, del 22 de Mayo de 2019, de HONDA MOTOR CO., LTD.: Un dispositivo de control de cambio de marcha automático de un vehículo que comprende: una parte de control para ejecutar una operación […]
Unidad de control, vehículo equipado con unidad de control, programa de control y método de control, del 16 de Agosto de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: El conmutador de cambio 19f es un interruptor que es pulsado por el motorista, y envía una orden de cambio de engranaje (señal que corresponde […]
Medición de esfuerzo sobre el pedal de una bicicleta o similar, del 7 de Diciembre de 2016, de LOPEZ-ARAQUISTAIN BERICOCHEA, ALFREDO: 1. Regulador de esfuerzo sobre el pedal de una bicicleta o similar, consistente en un dispositivo instalado en una bicicleta o vehículo similar, […]
Transmisión, del 22 de Junio de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una transmisión incluyendo: al menos un accionador de embrague configurado para desenganchar al menos un embrague de un mecanismo de transmisión […]
Vehículo del tipo de montar a horcajadas incluyendo una transmisión con modo automático y manual, del 18 de Mayo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas incluyendo: una transmisión ; un accionador configurado para accionar la transmisión […]
 Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
 Procedimiento para el accionamiento de una transmisión automática o semiautomática manual de un vehículo pesado, en modalidad de marcha en vacío, del 26 de Marzo de 2013, de VOLVO LASTVAGNAR AB: Procedimiento para el accionamiento de una transmisión manual, automática o semiautomática de unvehículo pesado, en modalidad de velocidad en vacío, cuyo procedimiento comprende:
suministrar […]
Procedimiento para el accionamiento de una transmisión automática o semiautomática manual de un vehículo pesado, en modalidad de marcha en vacío, del 26 de Marzo de 2013, de VOLVO LASTVAGNAR AB: Procedimiento para el accionamiento de una transmisión manual, automática o semiautomática de unvehículo pesado, en modalidad de velocidad en vacío, cuyo procedimiento comprende:
suministrar […]
ACTUADOR PARA SISTEMA DE TRANSMISIÓN AUTOMÁTICA CONTROLADO ELECTRÓNICAMENTE, del 7 de Diciembre de 2011, de DURA GLOBAL TECHNOLOGIES, INC.: Un sistema de transmisión automática que comprende, en combinación: una transmisión automática que tiene un retén que gira para realizar un cambio entre engranajes […]