Dispositivo de compensación de movimiento para compensar un marco portador en una embarcación para el desplazamiento de agua.
Dispositivo de compensación de movimiento (1; 51) para compensar un marco portador (2;
52) en una embarcación (3; 53) para un desplazamiento de agua, en el que el dispositivo (1; 51) comprende:
* a dicho marco portador (2; 52);
* un sistema de accionamiento (4, 5, 6; 54, 55, 56, 57) adaptado para trasladar el marco portador (2; 52) a lo largo de un eje-z y girar el marco portador (2; 52) alrededor de un eje-x y un eje-y, en el que el eje-x, el eje-y y el eje-z definen un conjunto imaginario de ejes ortogonales, extendiéndose el eje-z vertical;
* un sistema detector (8; 58) para detectar movimientos de translación según el eje-z, los movimientos de rotación según el eje-x y movimientos de rotación según el eje-y de la embarcación y generar señales de detección (10; 60) que representan a dichos movimientos detectados de la embarcación (3; 53);
* un sistema de control (9; 59) que genera señales de control (11, 12, 13; 61, 62, 63) para controlar el sistema de accionamiento en respuesta a dichas señales de detección (10, 60) de modo que se compensa la posición del marco portador (2; 52) para dichos movimientos detectados de la embarcación (3; 53); caracterizado,
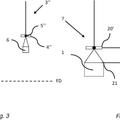
por el hecho de que el sistema de accionamiento comprende al menos tres unidades de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) que tienen cada uno un eje longitudinal vertical (14; 64);
por el hecho de que cada unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) tiene un soporte superior (15; 65) para sostener el marco portador (2; 52) en dicha unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) y un soporte inferior (16; 66) para sostener dicha unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) en una base (17; 67); por el hecho de que
* el soporte superior (15; 65) permite movimientos de rotación de la unidad de cilindro-pistón respectiva (4, 5, 6; 54, 55, 56, 57) en relación con el marco portador (2; 52) alrededor del eje-x así como del eje-y; y/o
* el soporte inferior (16; 66) permite movimientos de rotación de la unidad de cilindro-pistón respectiva (4, 5, 6; 54, 55, 56, 57) en relación con la base (17; 67) alrededor del eje-x así como del eje-y; y
por el hecho de que el dispositivo (1; 51) también comprende un sistema de restricción mecánica (18; 19; 20; 86, 87, 91; 92) que limita movimientos de translación según el eje-x, los movimientos de translación según el eje-y y movimientos de rotación según el eje-z del marco portador (2; 52) con respecto a la base.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2009/000082.
Solicitante: Barge Master IP B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: Fascinatio Boulevard, 882 2909 VA Capelle a/d Ijssel PAISES BAJOS.
Inventor/es: KOPPERT,PIETER MARTIJN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B27/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 27/00 Disposición de equipos a bordo para el embarque o el desembarque de carga o de pasajeros (gabarras o barcazas de descarga automática B63B 35/30; grúas flotantes B66C 23/52). › de grúas.
- B66C13/02 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Dispositivos que facilitan la recuperación de objetos flotantes, p. ej. para recuperar embarcaciones del agua (equipos para manipulación de botes salvavidas o similares B63B 23/00; carga o descarga de cargas flotantes utilizando los equipos a bordo B63B 27/36; salvamento o puesta en dique seco de buques B63C; mecanismos de control del enrollado B66D 1/52).
PDF original: ES-2493021_T3.pdf
Fragmento de la descripción:
Dispositivo de compensación de movimiento para compensar un marco portador en una embarcación para el desplazamiento de agua [0001] La presente invención se refiere en general a un dispositivo de compensación de movimiento para compensar un marco portador -que por ejemplo puede llevar un dispositivo de transferencia de cargas, como una grúa o pórtico en una embarcación para el desplazamiento local de agua.
Más específicamente, la presente invención se refiere a un dispositivo de compensación de movimiento para compensar un marco portador, en una embarcación para el desplazamiento local de agua en el que el dispositivo comprende:
â?¢ un marco portador para llevar la grúa;
â?¢ un sistema de accionamiento adaptado para trasladar el marco portador a lo largo de un eje-z y girar el marco portador alrededor de un eje-x y un eje-y, en el que el eje-x, el eje-y y eje-z definen un conjunto imaginario de ejes ortogonales, extendiéndose el eje-z vertical;
â?¢ un sistema detector para detectar movimientos de translación según el eje-z, movimientos de rotación según el ejex y movimientos de rotación según el eje-y de la embarcación y generar señales de detección que representan a dichos movimientos detectados de la embarcación; un sistema de control que genera señales de control para controlar el sistema de accionamiento en respuesta a dichas señales de detección de modo que la posición del marco portador se compensa para dichos movimientos detectados de la embarcación.
La invención también se refiere a un conjunto que comprende a este dispositivo de compensación de movimiento según la invención y una grúa, conjunto que también puede comprender una embarcación.
La invención también se refiere a un conjunto que comprende a este dispositivo de compensación de movimiento según la invención y una embarcación, conjunto que preferentemente comprende también una grúa. Por lo tanto dicho de otro modo, la presente invención también se refiere a una embarcación provista de un dispositivo de compensación de movimiento según la invención, embarcación que preferentemente también está provista de una grúa.
Cuando se transfieren cargas de una a otra embarcación o a alguna otra construcción, que puede ser móvil o inmóvil en relación con el suelo, surgen problemas debido al movimiento del agua en la cual flota la embarcación. El movimiento del agua somete el dispositivo de transferencia de carga, y en consecuencia, la carga a transferir, a movimientos similares. En caso de que la carga se realiza por un cable de elevación, el movimiento del agua también provocará un movimiento de balanceo de la carga. Se presentan problemas similares cuando una embarcación está recibiendo una carga, como un aterrizaje de helicópteros en la embarcación, un contenedor u otra carga. El movimiento del agua hace que el contenedor se mueva, lo que a su vez provoca el movimiento similar de la ubicación en la embarcación que ha de recibir la carga. Además, cuando las condiciones climáticas son muy tranquilas, los problemas mencionados anteriormente, debidos al movimiento del agua locales están presentes. A este respecto, es de señalar que aunque, evidentemente, el agua se pone en movimiento fuertemente por el viento, los efectos del viento pueden retrasarse durante semanas en el agua y tienen influencia en el agua a gran distancia de la ubicación del viento. Incluso el agua puede aparecer como muy tranquila, pero aún así estar en movimiento debido al viento de hace semanas y / o lejano. El efecto de esto sobre, por ejemplo, operaciones de construcción marinas es que se tiene que esperar a que el agua este casi inmóvil, en el caso para, por ejemplo, utilizar de forma segura una grúa con cable de elevación.
Con respecto a los movimientos a los que está sometida una embarcación en el agua, es de señalar que un contenedor está, de hecho, sujeto a 6 grados de libertad de movimiento, tres movimientos de traslación y tres movimientos de rotación. Mediante el uso de un enfoque matemático basado en un sistema de coordenadas cartesiano que tiene un conjunto imaginario de tres ejes ortogonales -un eje x, un eje y, y un eje z -estos 6 movimientos pueden ser llamados movimientos de translación según el eje-x, movimientos de translación según el eje-y, movimientos de translación según el eje-z, movimientos de rotación según el eje-x, movimientos de rotación según el eje-y y movimientos de rotación según el eje-z. Hay que destacar, que desde un punto de vista matemático también hay otras maneras equivalentes para definir los 6 grados de movimiento en un espacio, por ejemplo los 3 ejes utilizados podrían no ser ortogonales entre sí o podría utilizarse un así llamado sistema de coordenadas esféricas. Es sólo una cuestión de cálculo matemático transferir una definición de 6 grados de libertad de movimiento a otra definición de 6 grados de libertad de movimiento. Usando el llamado sistema de coordenadas cartesiano y que define el eje z como el que se extiende verticalmente, el eje x como el que se extiende en dirección longitudinal de un contenedor y el eje y como el que se extiende en dirección transversal de un contenedor, el movimiento de traslación del eje x se llama en la práctica avance, el movimiento de traslación del eje y se llama en la práctica deriva, el movimiento de traslación según el eje z se llama en la práctica arfada, el movimiento de rotación según el eje X se llama en la práctica balanceo, el movimiento de rotación según el eje-y se llama en la práctica cabeceo y
el movimiento de rotación según el eje-z se llama en la práctica guiñada.
GB 2.163.402 describe una disposición para la transferencia de artículos en mar abierto entre dos embarcaciones, que utiliza una disposición de pórtico -que tiene dos brazos conectados articuladamente -montados con un extremo del pórtico sobre una embarcación y que lleva en el otro extremo libre del pórtico un dispositivo de transporte en forma de una plataforma de carga. El dispositivo de transporte de carga se estabiliza en el espacio, lleva una disposición de detección de estabilización que detecta los tres movimientos de traslación y de rotación en el espacio del dispositivo de transporte de carga y proporciona señales de modo que el pórtico se puede controlar por medio de gatos y medios de control asociados para la compensación de los tres movimientos de traslación y los tres movimientos de rotación. Esta disposición es de construcción compleja y no puede compensar los movimientos locales de agua en caso de que la carga sea llevada por un cable de elevación. También el control de la compensación de 6 grados de libertad de movimiento es complejo. Además, teniendo en cuenta que la plataforma de carga provista de los sensores debe ser llevada por un brazo de articulación (el pórtico) a una gran distancia de la embarcación, los movimientos de rotación del recipiente aumentan primero en magnitud debido a la longitud del brazo y después se compensa, lo que hace que el control sea más difícil.
US 5, 947, 740 describe un simulador que permite a un operario reproducir o representar bajo condiciones de prueba fenómenos que se pueden producir. Este simulador comprende una plataforma soportada por seis + una unidades hidráulicas. Los extremos inferiores de las seis unidades hidráulicas están fijadas en pares de dos según un patrón triangular a la referencia fija y los extremos superiores están fijados en diferentes pares de dos a una plataforma de simulación, también según un patrón triangular. En posición de reposo las seis unidades hidráulicas se extienden oblicuamente con respecto a la vertical, -no estando ninguna de las unidades hidráulicas paralelas entre sí en la posición de reposo. Estas seis unidades hidráulicas se controlan de forma activa para mover la plataforma con propósitos de simulación. La otra unidad hidráulica es una vertical, que esencialmente lleva la carga de la plataforma y es pasiva, es decir, que no está controlada. La ventaja de esta unidad hidráulica central pasiva es que las otras seis unidades hidráulicas son sólo para el control de los movimientos de la plataforma y no es necesario soportar la carga de la plataforma. Por lo tanto, se reducen las fuerzas a ejercer por el control del movimiento de esta plataforma. Aunque el documento no parece mencionarlo, este simulador es del tipo que se utiliza en los simuladores de vuelo para entrenar a pilotos de avión. Se sabe, que este simulador de US 5, 947, 740 también se utiliza para compensar una plataforma de transferencia de pasajeros en una embarcación contra el movimiento del agua, por lo que los pasajeros pueden caminar fácilmente a otra embarcación o a una construcción con posición fija, sin... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de compensación de movimiento (1; 51) para compensar un marco portador (2; 52) en una embarcación (3; 53) para un desplazamiento de agua, en el que el dispositivo (1; 51) comprende: 5
â?¢ a dicho marco portador (2; 52) ;
â?¢ un sistema de accionamiento (4, 5, 6; 54, 55, 56, 57) adaptado para trasladar el marco portador (2; 52) a lo largo de un eje-z y girar el marco portador (2; 52) alrededor de un eje-x y un eje-y, en el que el eje-x, el eje-y y el eje-z definen un conjunto imaginario de ejes ortogonales, extendiéndose el eje-z vertical;
â?¢ un sistema detector (8; 58) para detectar movimientos de translación según el eje-z, los movimientos de rotación según el eje-x y movimientos de rotación según el eje-y de la embarcación y generar señales de detección (10; 60) que representan a dichos movimientos detectados de la embarcación (3; 53) ;
â?¢ un sistema de control (9; 59) que genera señales de control (11, 12, 13; 61, 62, 63) para controlar el sistema de accionamiento en respuesta a dichas señales de detección (10, 60) de modo que se compensa 15 la posición del marco portador (2; 52) para dichos movimientos detectados de la embarcación (3; 53) ;
caracterizado, por el hecho de que el sistema de accionamiento comprende al menos tres unidades de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) que tienen cada uno un eje longitudinal vertical (14; 64) ;
por el hecho de que cada unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) tiene un soporte superior (15; 65) para sostener el marco portador (2; 52) en dicha unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) y un soporte inferior (16; 66) para sostener dicha unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) en una base (17; 67) ;
por el hecho de que
â?¢ el soporte superior (15; 65) permite movimientos de rotación de la unidad de cilindro-pistón respectiva (4, 5, 6; 54, 55, 56, 57) en relación con el marco portador (2; 52) alrededor del eje-x así como del eje-y; y/o â?¢ el soporte inferior (16; 66) permite movimientos de rotación de la unidad de cilindro-pistón respectiva (4, 5, 6; 54, 55, 56, 57) en relación con la base (17; 67) alrededor del eje-x así como del eje-y;
y por el hecho de que el dispositivo (1; 51) también comprende un sistema de restricción mecánica (18; 19; 20; 86, 87, 91; 92) que limita movimientos de translación según el eje-x, los movimientos de translación según el eje-y y movimientos de rotación según el eje-z del marco portador (2; 52) con respecto a la base.
2. Dispositivo según la reivindicación 1, â?¢ en el que el sistema de restricción (18; 19; 20; 86, 87, 91; 92) es un sistema de restricción elástico, que tras una perturbación de una posición de reposo -definida como una posición en la que el marco portador y el marco de base son paralelos entre sí -genera fuerzas de reacción elásticas que actúan contra la perturbación; y/o â?¢ en el que el sistema de restricción (18; 19; 20; 86, 87, 91; 92) está amortiguado.
3. Dispositivo (1; 51) según cualquiera de las reivindicaciones anteriores, en el que el soporte superior (15; 65) y/o soporte inferior (16; 66) comprende uno seleccionado del grupo que comprende: junta cardán, cojinete esférico (71) 45 o rótula esférica (21) .
4. Dispositivo según cualquiera de las reivindicaciones anteriores, en el que el sistema de restricción comprende al menos tres barras (18, 19, 20) , estando cada barra articulada por un extremo (30) con la base y con el otro extremo (31) con el marco portador (2) . 50
5. Dispositivo según la reivindicación 4, â?¢ en el que dichas barras (18, 19, 20) se extienden horizontalmente, y en el que al menos dos de dichas barras están dispuestas ortogonales entre sí; y/o 55 â?¢ en el que dichas barras (18, 19, 20) funcionan según su dirección longitudinal como elementos de empuje/ tracción esencialmente rígidos.
6. Dispositivo según cualquiera de las reivindicaciones anteriores 4-5, 60 â?¢ en el que los extremos de dichas barras (18, 19, 20) están unidos a modo de manera articulada con el marco portador y la base mediante una junta cardán; y/o â?¢ en el que, por otro lado, la unión de los extremos de dichas barras (18, 19, 20) está limitada por la rotación según el eje-z, y, por otro lado, los extremos de una de dichas barras son desplazables entre sí por desviación; y/o 65 â?¢ en el que dichas barras (18, 19, 20) son de acero.
7. Dispositivo según cualquiera de las reivindicaciones anteriores, en el que la base comprende un segmento de base separado (35; 85) para cada unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) , y en el que cada segmento de base separado (35; 85) tiene dimensiones exteriores correspondientes a las dimensiones exteriores de un contenedor marino estándar, preferentemente un contenedor de 20, 30 ó 40 pies.
8. Dispositivo según cualquiera de las reivindicaciones anteriores,
â?¢ en el que cada unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) está montada de manera articulada ya sea en el marco portador o la base (17; 67) para almacenar la unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) con su dirección longitudinal (14; 64) extendiéndose de través, preferentemente perpendicular, al eje-z; y/o
â?¢ en el que cada unidad de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) tiene una carrera máxima en el intervalo de 1 a 3.5 metros, preferentemente en el intervalo de 1 a 2 metros; y/o
â?¢ en el que, visto de través con respecto el eje-z, la mayor distancia entre dos de dichas unidades de cilindro-pistón (4, 5, 6; 54, 55, 56, 57) de dichas al menos tres unidades de cilindro-pistón es como máximo de 40 metros, preferentemente como máximo de 30 metros; y/o
â?¢ en el que las al menos tres unidades de cilindro-pistón son unidades de cilindro-pistón hidráulicas (4, 5, 6; 54, 55, 56, 57) .
9. Conjunto que comprende:
â?¢ un dispositivo (1; 51) según cualquiera de las reivindicaciones anteriores; y
â?¢ una grúa (25; 75) ; en el que la grúa (25; 75) comprende un cable de elevación (26; 76) o una pinza que está montada de manera articulada en un brazo de grúa.
10. Conjunto según la reivindicación 9, que comprende además una embarcación (3; 53) , y en el que la embarcación (3; 53) está provista de:
â?¢ un sistema de anclaje dispuesto para impedir movimientos de translación de la embarcación según el ejex, los movimientos de translación según el eje-y y movimientos de rotación según el eje-z; o
â?¢ un sistema de posicionamiento dinámico dispuesto para impedir movimientos de translación de la embarcación según el eje-x, los movimientos de translación según el eje-y y movimientos de rotación según el eje-z.
11. Procedimiento para compensar un marco portador en una embarcación para el desplazamiento local de agua, en el que el marco portador está soportado por un sistema de accionamiento que comprende al menos tres unidades de cilindro-pistón, que tienen cada uno un eje longitudinal vertical; en el que se miden los movimientos de translación según el eje-z, los movimientos de rotación según el eje-x y los movimientos de rotación según el eje-y de la embarcación; en el que las unidades de cilindro-pistón están controlados por señales de control generadas en respuesta a las medidas de dichos movimientos de translación según el eje-z, los movimientos de rotación según el eje-x y los movimientos de rotación según el eje-y de la embarcación; y en el que un sistema de restricción (18, 19, 20; 86, 87, 91, 92) limita los movimientos de translación según el eje-x, los movimientos de translación según el eje-y y los movimientos de rotación según el eje-z del marco portador (2; 52) con respecto a la embarcación (3; 53) a los movimientos, necesarios para permitir movimientos de rotación según el eje-z, movimientos de rotación según el eje-x y movimientos de rotación según el eje-y del marco portador (2; 52) con respecto a la embarcación (3; 53) , por dicho sistema de accionamiento.
12. Procedimiento según la reivindicación 11, en el que el sistema de restricción es un sistema de restricción elástico que genera fuerzas de reacción elásticas tras perturbaciones de una posición de reposo, fuerzas de reacción que actúan contra perturbaciones de dicha posición de reposo, en el que la posición de reposo se define como una posición en la que el marco portador y el marco de base son paralelos entre sí.
13. Procedimiento según cualquiera de las reivindicaciones 11-12, en el que el sistema de restricción comprende al menos tres barras (18, 19, 20) , estando cada barra articulada con la base por un extremo (30) y con el marco portador (2) con el otro extremo (31) .
14. Procedimiento según la reivindicación 13,
â?¢ en el que dichas barras se extienden horizontalmente, y en el que al menos dos de dichas barras (18, 19, 20) están dispuestas ortogonales entre sí; y/o
â?¢ en el que dichas barras (18, 19, 20) funcionan según su dirección longitudinal como elementos de empuje/ tracción esencialmente rígidos.
15. Procedimiento según cualquiera de las reivindicaciones 11-14, en el que el marco portador lleva una grúa (25; 75) , y en el que la grúa (25; 75) comprende un cable de elevación (26; 76) o una pinza montada de manera articulada en un brazo de grúa.
Patentes similares o relacionadas:
 Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Sistema para transporte de personas y/o mercancías por medio de una lanzadera, del 10 de Julio de 2019, de Hallcon b.v: Un sistema para transportar personas y/o mercancías que comprende: - una lanzadera que está provista en el lado superior de medios desmontables para elevar la […]
Embarcación de abastecimiento mar adentro, del 12 de Junio de 2019, de Kongsberg Maritime CM AS: Barco de abastecimiento mar adentro para trasporte de cargamento, que comprende una, en lo principal, cubierta abierta , varios tanques de cargamento que […]
Un método para transportar a una persona de una primera posición con respecto a una embarcación a una segunda posición con respecto a la embarcación, un dispositivo para el transporte de la persona, y un sistema y una embarcación que comprenden el dispositivo, del 24 de Abril de 2019, de Coöperatieve Vereniging Offshore Cooperation U.A: Un procedimiento para transportar una persona de una primera posición respecto a una embarcación a una segunda posición respecto a la embarcación , mediante […]
Buque de carga de mercancía y procedimiento de realización del mismo, del 27 de Febrero de 2019, de HYUNDAI HEAVY INDUSTRIES CO., LTD: Buque de carga de mercancía que comprende: una pluralidad de paredes laterales que se proyectan hacia un lado superior […]
MECANISMO LIMITADOR DE LA CARGA DE UNA GRÚA EN UNA EMBARCACIÓN, del 22 de Noviembre de 2018, de INDUSTRIAS GUERRA, S.A: Mecanismo limitador de la carga de una grúa en una embarcación, donde la grúa comprende un brazo con prolongaciones hidráulicas y una columna de giro […]
Mecanismo limitador de la carga de una grúa en una embarcación, del 3 de Octubre de 2018, de INDUSTRIAS GUERRA, S.A: Mecanismo limitador de la carga de una grúa en una embarcación, donde la grúa comprende un brazo y una columna de giro unida a la embarcación, […]
Embarcación que comprende una grúa, del 1 de Abril de 2015, de IHC Holland IE B.V: Embarcación que comprende una grúa , estando conectada la grúa a una cubierta de la embarcación, comprendiendo la grúa - un bastidor […]