Sistema de preparación para la expedición y procedimiento para la carga de un soporte de carga.
Sistema de preparación para la expedición con un dispositivo (1) para la carga manual o automatizada de unsoporte de carga (2) con unidades de carga (4) que forman una pila de carga (3),
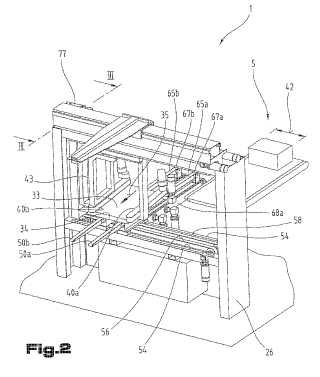
que presenta un equipo detransporte y posicionamiento (16), mediante el cual se facilitan de forma individualizada para la carga manual lasunidades de carga (4) sobre el mismo, o mediante el cual para la carga automatizada se depositan las unidades decarga (4) en las posiciones de carga en el espacio fijadas por un sistema de ordenador sobre la pila de carga (3),presentando el equipo de transporte y posicionamiento (16) bandas de transporte (50a, 50b) graduables a través deun dispositivo de graduación (52) a una separación (53) establecida a partir de la propiedad de transporte de launidad de carga (4) a apilar y/o a partir de un ancho de hueco (81) de hueco de pila en una ubicación de pila de lapila de carga (3), presentando el dispositivo (1) un equipo de suministro (5) estacionario para las unidades de carga(4), caracterizado porque el dispositivo (1) presenta además un equipo de transporte de alimentación (17)pospuesto al equipo de suministro (5) en dirección de transporte (35) de las unidades de carga (4) y graduable enuna dirección (dirección x) horizontalmente a lo largo del portador de carga (2) para el transporte de las unidades decarga (4) sobre las bandas de transporte (50a, 50b) así como un equipo de transporte de reparto (90) graduablemediante un dispositivo de graduación en una dirección (dirección x) horizontalmente a lo largo del soporte de carga(2) y con respecto al equipo de transporte de alimentación (17) para las unidades de carga (4), que está dispuestoen dirección de transporte (35) de las unidades de carga (4, 4.1, 4.2, 4.3) entre el equipo de suministro (5) y elequipo de transporte de alimentación (17).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AT2009/000027.
Solicitante: TGW MECHANICS GMBH.
Nacionalidad solicitante: Austria.
Dirección: COLLMANNSTRASSE 2 4600 WELS AUSTRIA.
Inventor/es: WOLKERSTORFER, CHRISTOPH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G57/11 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › siendo apilados los objetos por acción directa del transportador de alimentación.
- B65G61/00 B65G […] › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
PDF original: ES-2421430_T3.pdf
Fragmento de la descripción:
Sistema de preparación para la expedición y procedimiento para la carga de un soporte de carga La invención se refiere a un sistema de preparación para la expedición de acuerdo con el preámbulo de la reivindicación 1 y a un procedimiento según las correspondientes reivindicaciones 10 y 11 para la carga manual o automatizada de un soporte de carga, particularmente de un palé, con unidades de carga que forman una pila de carga.
Por el documento genérico NL 1 023 904 C2 es conocido un dispositivo para la carga de un soporte de carga con maletas, que presenta un equipo de transporte y posicionamiento, mediante el cual se depositan las maletas sobre el soporte de carga en posiciones de carga fijadas por un sistema de ordenador. La posición de carga se establece por el sistema de ordenador vinculándose el estado de carga sobre el soporte de carga con propiedades de transporte de las maletas y comprobándose qué maleta se puede depositar en qué hueco en la pila. El equipo de transporte y posicionamiento presenta bandas de transporte dispuestas con una separación ajustable.
Un dispositivo para la carga automatizada de un soporte de carga con unidades de carga que forman una pila de carga se conoce por el documento EP 1 462 394 B 1, que presenta un equipo de suministro, una placa de carga estacionaria, un equipo de transporte de alimentación para el desplazamiento de una unidad de carga sobre y con respecto a la placa de carga estacionaria en una dirección (dirección x) horizontalmente a lo largo del soporte de carga y un equipo de transporte y posicionamiento para agarrar una unidad de carga sobre la placa de carga y para la traslación de la unidad de carga en dirección a la profundidad de carga del soporte de carga (dirección z) así como un rascador dispuesto por encima del equipo de transporte y posicionamiento, que es trasladable independientemente del equipo de transporte y posicionamiento en dirección z y que sirve para retener la unidad de carga en la posición deseada sobre la pila de carga. El soporte de carga se carga según una configuración de carga en el espacio optimizada con respecto a la estabilidad y/o el aprovechamiento del volumen de las unidades de carga en la pila de carga. A partir de la configuración de carga se establece una secuencia de carga, conforme a la cual se acercan mediante transporte de forma individualizada las unidades de carga sobre la placa de carga estacionaria, moviéndose una única unidad de carga desde el equipo de transporte de alimentación en dirección x hasta la posición x prevista de la unidad de carga en la configuración de carga de la pila de carga. A continuación, la unidad de carga se empuja mediante el rascador sobre el equipo de transporte y posicionamiento que sobresale en dirección z y se mueve mediante el mismo en dirección z hasta la posición z prevista en la configuración de carga de la pila de carga. Después se retira el equipo de transporte y posicionamiento, mientras que el rascador en primer lugar permanece en su posición, por lo que se deposita la unidad de carga en la posición z prevista para la misma sobre la pila de carga. A continuación se vuelven a retirar el equipo de transporte y posicionamiento y el rascador. La colocación de una unidad de carga en la pila de carga en dirección y se consigue mediante elevación o descenso del soporte de carga.
Por el documento JP 11-020945 A es conocido un dispositivo para la carga automatizada de un soporte de carga que ejerce una carga sobre una plataforma elevadora con unidades de carga, que presenta un equipo de transporte y posicionamiento que se puede mover a través de un primer dispositivo de graduación en una dirección (dirección x) horizontalmente a lo largo del soporte de carga y a través de un segundo dispositivo de graduación en dirección a la profundidad de carga del soporte de carga (dirección z) , que está configurado como transportador de banda. Al equipo de transporte y posicionamiento le sigue una unidad de transporte de entrada, cuyo extremo dispuesto aguas abajo se puede graduar en dirección x y z.
Los dispositivos conocidos para la carga automatizada de un soporte de carga usan un equipo de transporte y posicionamiento con una anchura fijada con respecto al diverso espectro de las unidades de carga. La anchura se adapta a la unidad de carga de la mayor dimensión, de tal manera que no se puede hacer uso de un hueco en una ubicación de pila entre unidades de carga adyacentes ya apiladas sobre el soporte de carga o entre una unidad de carga y una parte de pared de un medio auxiliar de apilado cuando la anchura del equipo de transporte y posicionamiento es mayor que un ancho de hueco. Debido a los huecos que quedan entre las unidades de carga o en la zona marginal de la pila de carga, una optimización del aprovechamiento del volumen en la pila de carga es posible solo de modo limitado.
El documento EP 0 799 780 A1 describe un dispositivo para la carga de un soporte de carga, en el que las unidades de carga acercadas mediante transporte sobre un equipo de suministro se colocan por un dispositivo de alineación entre placas de alineación con respecto al equipo de suministro.
Por el documento DE 30 17 612 A1 se conoce un sistema de preparación para la expedición, en el que los huecos se alimentan con unidades de carga a través de un equipo de transporte y posicionamiento, formando el equipo de transporte y posicionamiento un plano de transporte que tiene un recorrido inclinado hacia abajo en dirección de transporte de las unidades de carga hacia su extremo anterior.
Por el estado de la técnica son conocidos también sistemas de preparación para la expedición, en los que se apilan las unidades de carga manualmente sobre un soporte de carga. Las unidades de carga se facilitan individualizadas sobre un equipo de transporte y posicionamiento, son agarradas por una persona que prepara para la expedición y
se apilan sobre el soporte de carga en posiciones de carga adecuadas. Para la persona que prepara para la expedición se obtienen condiciones ergonómicamente desfavorables, en el sentido de que no se tiene en cuenta la accesibilidad y facilidad de agarre de las unidades de carga.
El objetivo de la invención es crear un dispositivo y un procedimiento para la carga manual o automatizada de un soporte de carga con unidades de carga, que se pueda diseñar de forma aún más eficaz frente al estado de la técnica incluso en caso de unidades de carga con las más diversas propiedades, tales como dimensiones, naturaleza y similares.
El objetivo de la invención se resuelve mediante las características y medidas de las reivindicaciones 1, 10 y 11. El sistema de preparación para la expedición o el procedimiento de preparación para la expedición son adecuados para la carga manual o automatizada de un soporte de carga, particularmente un palé de pedido con unidades de carga.
Es ventajoso que gracias al ajuste de la separación entre las bandas de transporte se consigue un apoyo fiable de las unidades de carga con su movimiento hasta la posición de carga sobre la pila de carga. Si se han de apilar unidades de carga largas, las bandas de transporte se separan hasta que una unidad de carga ejerza una carga de forma fiable en las bandas de transporte y no se deslice entre de las mismas. Si, por el contrario, se han de apilar unidades de carga estrechas, las bandas de transporte se acercan unas a otras dejando libre una separación de seguridad, de tal manera que se crea un plano de transporte prácticamente de superficie completa para una unidad de carga. No obstante, la separación también se puede ajustar de forma adecuada teniendo en cuenta otros criterios, particularmente una propiedad de transporte de la unidad de carga. En otras palabras, se puede fijar el ajuste de separación también dependiendo de la estabilidad dimensional (unidad de carga flexible o con estabilidad dimensional) o la naturaleza superficial de las unidades de carga.
Particularmente, con la carga manual también es posible que, por un lado, las unidades de carga se transporten de forma fiable hasta un lugar de preparación para la expedición y, por otro lado, se posibilite para la persona que prepara para la expedición una extracción cómoda de la unidad de carga del equipo de transporte y posicionamiento. La extracción por la persona que prepara para la expedición se puede facilitar particularmente sobresaliendo lateralmente la unidad de carga en un grado suficiente en las bandas de transporte y pudiéndose agarrar de forma particularmente buena desde abajo con las manos. Se crean con ello condiciones ergonómicamente favorables para el operario.
Además, durante la carga automatizada, el equipo de transporte y posicionamiento puede hacer uso también de huecos de pila... [Seguir leyendo]
Reivindicaciones:
1. Sistema de preparación para la expedición con un dispositivo (1) para la carga manual o automatizada de un soporte de carga (2) con unidades de carga (4) que forman una pila de carga (3) , que presenta un equipo de transporte y posicionamiento (16) , mediante el cual se facilitan de forma individualizada para la carga manual las unidades de carga (4) sobre el mismo, o mediante el cual para la carga automatizada se depositan las unidades de carga (4) en las posiciones de carga en el espacio fijadas por un sistema de ordenador sobre la pila de carga (3) , presentando el equipo de transporte y posicionamiento (16) bandas de transporte (50a, 50b) graduables a través de un dispositivo de graduación (52) a una separación (53) establecida a partir de la propiedad de transporte de la unidad de carga (4) a apilar y/o a partir de un ancho de hueco (81) de hueco de pila en una ubicación de pila de la pila de carga (3) , presentando el dispositivo (1) un equipo de suministro (5) estacionario para las unidades de carga (4) , caracterizado porque el dispositivo (1) presenta además un equipo de transporte de alimentación (17) pospuesto al equipo de suministro (5) en dirección de transporte (35) de las unidades de carga (4) y graduable en una dirección (dirección x) horizontalmente a lo largo del portador de carga (2) para el transporte de las unidades de carga (4) sobre las bandas de transporte (50a, 50b) así como un equipo de transporte de reparto (90) graduable mediante un dispositivo de graduación en una dirección (dirección x) horizontalmente a lo largo del soporte de carga (2) y con respecto al equipo de transporte de alimentación (17) para las unidades de carga (4) , que está dispuesto en dirección de transporte (35) de las unidades de carga (4, 4.1, 4.2, 4.3) entre el equipo de suministro (5) y el equipo de transporte de alimentación (17) .
2. Sistema de preparación para la expedición de acuerdo con la reivindicación 1, caracterizado porque el equipo de transporte de alimentación (17) puede graduarse mediante un dispositivo de graduación (24) en una dirección (dirección x) horizontalmente a lo largo del soporte de carga (2) y con respecto al equipo de transporte y posicionamiento (16) .
3. Sistema de preparación para la expedición de acuerdo con la reivindicación 1, caracterizado porque las bandas de transporte (50a, 50b) presentan medios de transporte (71) graduables sincrónicamente a través de un dispositivo de graduación (60) en dirección (dirección z) al soporte de carga (2) con respecto al equipo de transporte de alimentación (17) .
4. Sistema de preparación para la expedición de acuerdo con la reivindicación 1, caracterizado porque el dispositivo (1) presenta un dispositivo de alineación (18) que coloca la unidad de carga (4) en una dirección (dirección x) horizontalmente a lo largo del portador de carga (2) .
5. Sistema de preparación para la expedición de acuerdo con la reivindicación 1, caracterizado porque las bandas de transporte (50a, 50b) sobresalen en un extremo anterior en dirección de transporte (35) de las unidades de carga
(4) del equipo de transporte de alimentación (17) y están dispuestas por debajo del mismo.
6. Sistema de preparación para la expedición de acuerdo con la reivindicación 1 o 5, caracterizado porque las bandas de transporte (50a, 50b) forman un plano de transporte que tiene un recorrido inclinado hacia abajo en dirección de transporte (35) de las unidades de carga (4) hacia sus extremos anteriores.
7. Sistema de preparación para la expedición de acuerdo con la reivindicación 1 o 5, caracterizado porque el equipo de transporte de alimentación (17) forma un plano de transporte que tiene un recorrido inclinado hacia abajo en dirección de transporte (35) de las unidades de carga (4) hacia su extremo anterior.
8. Sistema de preparación para la expedición de acuerdo con la reivindicación 1, caracterizado porque el dispositivo (1) entre una estación de elevación (6) para elevar y descender un portador de carga (2) y el equipo de transporte de alimentación (17) presenta un lugar de preparación para la expedición (12) .
9. Sistema de preparación para la expedición de acuerdo con la reivindicación 1, caracterizado porque está previsto un equipo de registro para el registro de la propiedad de transporte, tal como una dimensión, geometría, estabilidad dimensional, naturaleza superficial y/o de una proporción de longitud/anchura/altura de la unidad de carga (4) .
10. Procedimiento para la carga manual o automatizada de un soporte de carga (2) con unidades de carga (4) que forman una pila de carga (3) con un dispositivo (1) en un sistema de preparación para la expedición de acuerdo con la reivindicación 1, en el que se facilitan de forma individualizada las unidades de carga (4) para la carga manual sobre un equipo de transporte y posicionamiento (16) , o las unidades de carga (4) para la carga automatizada se depositan mediante un equipo de transporte y posicionamiento (16) en las posiciones de carga en el espacio fijadas por un sistema de ordenador sobre la pila de carga (3) , registrándose antes de la recepción de una unidad de carga
(4) en el equipo de transporte y posicionamiento (16) una propiedad de transporte de la unidad de carga (4) y ajustándose a través de un dispositivo de graduación (52) una separación (53) establecida a partir de la propiedad de transporte de la unidad de carga (4) a apilar entre las bandas de transporte (50a, 50b) que presentan el equipo de transporte y posicionamiento (16) .
11. Procedimiento para la carga de un soporte de carga (2) con unidades de carga (4) que forman una pila de carga (3) con un dispositivo (1) en un sistema de preparación para la expedición de acuerdo con la reivindicación 1, en el
que mediante un equipo de transporte y posicionamiento (16) se depositan las unidades de carga (4) en las posiciones de carga en el espacio fijadas por un sistema de ordenador sobre la pila de carga (3) , registrándose un ancho de hueco (81) de un hueco de pila en una ubicación de pila de la pila de carga (3) y ajustándose a través de un dispositivo de graduación (52) una separación (53) establecida a partir del ancho de hueco (81) entre las bandas de transporte (50a, 50b) que presentan el equipo de transporte y posicionamiento (16) .
12. Procedimiento de acuerdo con la reivindicación 10 u 11, caracterizado porque durante la carga del soporte de carga (2) se despliegan las bandas de transporte (50a, 50b) con una unidad de carga (4) que ejerce una carga sobre las mismas hasta por encima de la posición de carga, transfiere la unidad de carga (4) al soporte de carga (2) y se desplazan de nuevo hacia atrás, moviéndose un plano de transporte por medios de transporte (71) durante el repliegue de las bandas de transporte (50a, 50b) en contra de una dirección de retracción (79) y cediéndose a este respecto la unidad de carga (4) sin desplazamiento relativo con respecto al plano de transporte a la posición de carga fijada.
13. Procedimiento de acuerdo con la reivindicación 10 u 11, caracterizado porque durante la carga del soporte de carga (2) se ajustan las bandas de transporte (50a, 50b) hasta por encima de la posición de carga para la unidad de carga (4) y después al menos una banda de transporte (50a, 50b) se mueve en la dirección (dirección x) horizontalmente a lo largo del soporte de carga (2) y con respecto al soporte de carga (2) y, para ello, se presiona contra una pared lateral (83) de una unidad de carga (4) ya existente en el soporte de carga (2) y a continuación se mueve una unidad de carga (4) hasta la posición de carga y se deposita en ese lugar.
14. Procedimiento de acuerdo con la reivindicación 10 u 11, caracterizado porque después de la recepción de una primera unidad de carga (4.1) a un equipo de transporte de alimentación (17) antepuesto al equipo de transporte y posicionamiento (16) y su transporte desde el equipo de transporte de alimentación (17) hasta una posición de carga fijada en la pila de carga (3) se mueve una segunda unidad de carga (4.2) por un equipo de transporte de reparto
(90) con respecto al equipo de transporte de alimentación (17) a una posición de transferencia.
15. Procedimiento de acuerdo con la reivindicación 14, caracterizado porque la unidad de carga (4.1, 4.2) se mueve por el equipo de transporte de reparto (90) a una posición de transferencia correspondiente a la posición de carga fijada por el sistema de ordenador en la pila de carga (3) en dirección x.
16. Procedimiento de acuerdo con la reivindicación 14, caracterizado porque la unidad de carga (4.1, 4.2) se mueve por el equipo de transporte de reparto (90) a una posición de transferencia correspondiente a la posición de carga fijada por el sistema de ordenador para una unidad de carga (4.1, 4.2) del ciclo de carga anterior en la pila de carga (3) en dirección x.
Patentes similares o relacionadas:
Aparato para clasificar objetos, del 20 de Noviembre de 2019, de SYSTEM CERAMICS S.P.A.: Un aparato para clasificar los objetos transportados por una línea transportadora, que comprende: una línea transportadora con respecto a la cual se […]
Dispositivo de detección y método para un dispositivo de transferencia de capa, del 20 de Noviembre de 2019, de Gebo Packaging Solutions Italy SRL: Un método de transferencia para utilizar un dispositivo de transferencia que funciona como dispositivo de desmontaje de palé, a fin de transferir capas preformadas […]
Procedimiento para producir pilas de hojas, del 5 de Junio de 2019, de BW Papersystems Stuttgart GmbH: Procedimiento para producir pilas de hojas en el que está previsto que para salvar una separación vertical entre el nivel de suministro de las hojas […]
Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta, del 5 de Junio de 2019, de Gebo Packaging Solutions Italy SRL: Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta estandarizada, que comprende: - una columna de guiado […]
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
Línea de corte y procedimiento para apilar piezas en bruto que salen de una cizalla o prensa de corte, del 29 de Mayo de 2019, de ABB SCHWEIZ AG: Línea de corte, que comprende un sistema de líneas de apilamiento para apilar las piezas en bruto que salen de la línea de corte, en el que de la línea sale una pluralidad […]
Despaletizador para bandejas de huevos, del 30 de Abril de 2019, de Sanovo Technology Italia S.R.L: Un despaletizador para soportes de huevos teniendo cada uno áreas vacías delimitadas entre dos filas de huevos, que comprende: una cabeza movible […]
Dispositivo y procedimiento de apilado de paquetes de tamaños diferentes, del 12 de Marzo de 2019, de FIVES SYLEPS ROBOTICS: Dispositivo de apilado de paquetes (2, 2',...) en un palé , que comprende medios de suministro de un palé vacío a un puesto de espera […]