Registro de alta velocidad con línea de retardo por derivación.
Un método de determinación de una distancia a un objeto, incluyendo el método emitir un pulso láser dirigido hacia el objeto y recibir una reflexión de retorno desde el objeto,
estando dicho método caracterizado por:
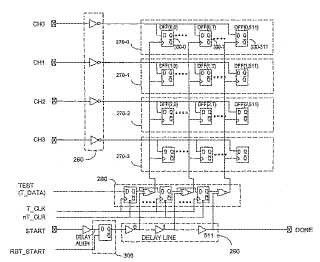
propagar una versión enclavada de un pulso de inicio (START) a través de una línea (290) de retardo por derivación que comprende una cadena conectada en serie de búferes digitales que contribuyen cada uno con un retardo de tiempo incremental al pulso de inicio enclavado y emiten una correspondiente señal de muestreo, estando dicho pulso de inicio asociado con la salida del pulso láser;
acoplar una señal de datos analógica (DATA) a uno o más comparadores (220) que emiten cada uno una señal de comparador basándose en comparar la señal de datos analógica con un respectivo umbral de nivel de señal diferente, incluyendo dicha señal de datos analógica un pulso de retorno que representa la radiación reflejada de vuelta desde el objeto;
capturar el estado de cada señal de comparador en un correspondiente registro (270) de canal que comprende un conjunto de biestables que están sincronizados individualmente con una respectiva de las señales de muestreo emitidas desde la línea (290) de retardo por derivación, de modo que el registro (270) de canal captura el estado de la señal del comparador en tiempos de muestreo correspondientes a los retardos incrementales de los búferes digitales individuales en la línea (290) de retardo por derivación, comenzando con el pulso de inicio;
determinar un primer tiempo por encima del umbral, FOT, y un tiempo total por encima del umbral, TOT, para la señal de datos analógica a partir de los estados de las una o más señales de comparador capturadas por los uno o más registros (270) de canal;
calcular una distancia al objeto en función del tiempo FOT; y
corregir la distancia calculada en función de errores derivados de fluctuaciones en la intensidad del pulso de retorno mediante consulta de una corrección de tiempo basada en el tiempo TOT.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2001/043290.
Solicitante: Omron Scientific Technologies, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 6550 Dumbarton Circle Fremont, CA 94555-3611 ESTADOS UNIDOS DE AMERICA.
Inventor/es: DRINKARD,JOHN J, OLTMAN,ED, KNODE,GALEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01R13/34 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 13/00 Disposiciones para la presentación de variables eléctricas o de formas de ondas. › Circuitos para representar una sola forma de onda por muestreo, p. ej. para muy altas frecuencias.
- G01R31/28 G01R […] › G01R 31/00 Dispositivos para ensayo de propiedades eléctricas; Dispositivos para la localización de fallos eléctricos; Disposiciones para el ensayo eléctrico caracterizadas por lo que se está ensayando, no previstos en otro lugar (ensayo o medida de dispositivos semiconductores o de estado sólido, durante la fabricación H01L 21/66; ensayo de los sistemas de transmisión por líneas H04B 3/46). › Ensayo de circuitos electrónicos, p. ej. con la ayuda de un trazador de señales (ensayo de computadores durante las operaciones de espera "standby" o los tiempos muertos G06F 11/22).
- G01R31/30 G01R 31/00 […] › Ensayos marginales, p. ej. haciendo variar la tensión de alimentación (ensayo de computadores durante las operaciones de espera "standby" o los tiempos muertos G06F 11/22).
- G01S17/10 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 17/32).
PDF original: ES-2441205_T3.pdf
Fragmento de la descripción:
Registro de alta velocidad con línea de retardo por derivación
Campo de la invención La presente invención se refiere, en general, a sistemas de sincronismo para medir intervalos de tiempo cortos, y más particularmente a sistemas de sincronismo adecuados para mediciones de pulsos de tiempo de vuelo tal como los que se encuentran en sistemas que se usan para proteger equipos protegidos.
Antecedentes de la invención En muchas aplicaciones es necesario conocer la distancia entre dos puntos. Aunque el conocimiento de la distancia per se puede usarse para crear un telémetro, en otras aplicaciones el conocimiento de la distancia puede usarse para proteger una zona frente a la intrusión. Una fábrica puede tener equipos robóticos o potencialmente peligrosos que deben protegerse frente a extraños. Un sistema que puede medir la distancia entre tal equipo y una región perimetral alrededor del equipo puede hacer sonar una alarma o apagar el equipo si alguien se aproxima más allá de la periferia de la zona protegida. De esta manera, se protege a los extraños de resultar dañados por el equipo, y se protege a los operarios que estén usando el equipo de resultar dañados por verse sobresaltados o perturbados de otro modo por extraños.
La figura 1 representa un denominado sistema 10 de tiempo de vuelo genérico usado para calcular la distancia X entre el sistema 10 y un objetivo (TARGET) . EL sistema 10 puede ubicarse adyacente a maquinaria robótica o tal vez peligrosa en una fábrica, donde debe sonar una alarma o apargarse la maquinaria si alguien se aproxima más cerca de una distancia X.
Normalmente el sistema 10 incluye un generador 20 de disparo que crea un tren de pulsos que se introduce en un transmisor 30 (XMTR) , tal como un láser de alta velocidad, que emite un pulso a través de una lente 40 adecuada. El pulso 50 emitido se irradia hacia fuera a la velocidad de la luz, y al menos una parte de la radiación puede entrar en contacto con la superficie del objetivo, y reflejarse de vuelta hacia el sistema 10. La radiación 55 reflejada de vuelta, que también se desplaza a la velocidad de la luz, se detecta mediante un transductor 60 apropiado (por ejemplo, una lente óptica) y un fotodetector 70. En una aplicación de protección de zona, un espejo en el sistema 10 rota mecánicamente en un plano de manera que los pulsos transmitidos exploran la región protegida, y se detectan pulsos de retorno desde esta región. La región protegida puede definirse como un arco barrido centrado en el equipo que debe protegerse, y que se extiende hacia fuera con un radio de al menos X. Normalmente el transmisor láser se dispara o emite pulsos con una frecuencia conocida en sincronía con la rotación del espejo de manera que los pulsos de retorno detectados pueden correlacionarse con un ángulo de emisión, para localizar la posición angular y la separación del objeto intruso. En tales aplicaciones, cualquier objetivo (TARGET) a una distancia X dentro de la zona de protección barrida se presume que es un intruso. Obsérvese que X puede ser una función del ángulo de exploración en el sentido de que el perímetro protegido no tiene que estar definido por un arco barrido.
Tal como se indica en la figura 1, habrá un desplazamiento de tiempo o de fase entre partes correspondientes de la energía 50 de pulso radiante y la radiación 55 devuelta o reflejada. Por tanto, en el tiempo t0, un primer pulso irradiado pasa de 0 a 1, pero el mismo pulso tras la detección (indicado ahora como P1’) tendrá su transición de borde delantero de 0 a 1 en el tiempo t1+Tw posterior a t0. Una unidad 80 lógica de contador de alta velocidad en el sistema 10 intenta entonces calcular la diferencia de tiempo entre t1+Tw y t0. Tw es un término que depende de la intensidad de la señal que se denomina en ocasiones “recorrido de tiempo”.
En la unidad 10, el pulso de retorno detectado P’ se amplifica y se acopla en un comparador para determinar el tiempo de transición de pulso retorno. El tiempo de transición de pulso retorno depende normalmente de la intensidad del pulso de retorno, que a su vez está determinada por la separación y la reflectividad del objeto. En la figura 1, T1 es el retardo correspondiente a la separación física entre el sistema 10 y el objeto u objetivo, mientras que Tw es el término dependiente de la intensidad de recorrido de tiempo.
Normalmente la unidad 80 incluye un reloj 85 maestro de alta velocidad (CLK) y un contador 90 de alta velocidad (COUNT) . En el tiempo t0, según se determina mediante un pulso START asociado con el comienzo de una emisión 50 de salida, el contador 90 comienza a contar pulsos de reloj. En el tiempo t1+tw, cuando se detecta el pulso P1’, el contador 90 se detiene al recibir un pulso STOP y se determina el valor de recuento.
Normalmente Tw depende fuertemente de la respuesta a la señal del conjunto de circuitos de transmisor y receptor y debe caracterizarse. Se determinan valores de corrección en un intervalo de intensidades de señal P1’ y se almacenan en una tabla. Los valores almacenados en la tabla de corrección se indexan por intensidad de señal detectada y pueden ser utilizados por un circuito de control de sistema para extraer el valor t1. Por tanto, los sistemas de la técnica anterior que emplean contadores de intervalo de tiempo normalmente usarán un detector de pico o integrador de señal.
Una vez conocido t1, se determina una medida de distancia x dado Mt = (t1 - t0) mediante la siguiente ecuación:
donde c = velocidad de la luz (300.000 km/s) .
En el sistema 10, la generación, transmisión y recepción de pulsos puede ser sencilla. Pero puede resultar complicado para el sistema 10 resolver la distancia X con una tolerancia o granularidad de medición deseada. Por ejemplo, medir la distancia con una granularidad de resolución de aproximadamente ± 5 cm requiere un contador de 3 GHz. Tales dispositivos de alta velocidad son caros y normalmente consumen varios vatios de potencia eléctrica.
Un enfoque alternativo sería sustituir la función del reloj 85 de alta velocidad y la unidad 90 de contador de alta velocidad por un convertidor analógico a digital de alta velocidad. Sin embargo los convertidores analógico a digital de alta velocidad son relativamente caros.
Otro enfoque más sería sustituir las unidades 85 y 90 por un grabador de transitorios, implementado tal vez de manera poco costosa usando procesos de fabricación CMOS comunes. El grabador de transitorios podría ser extremadamente rápido pero no consumiría excesiva potencia eléctrica. Una técnica de grabador de transitorios de la técnica anterior se describe en una tesis doctoral de ciencias de la Univ. de Calif. en Berkeley 1992 titulada “A Multi-Gigahertz Analog Transient Recorder Integrated Circuit” de S. A. Kleinfelder. La tesis de Kleinfelder describía una línea de retardo activa, por derivación, que utilizaba una red de condensadores de almacenamiento. Los condensadores almacenaban muestras del pulso de retorno detectado P1’ en tiempos de retardo específicos que se establecían por el retardo de cada elemento en la línea de retardo.
El enfoque de Kleinfelder parece ideal porque presenta una representación completamente digitalizada del pulso (o múltiples pulsos) retardado (s) , a un coste relativamente mínimo. Además, no es necesario establecer un umbral para el pulso analógico de retorno, y la distancia de separación puede calcularse usando un algoritmo que tenga en cuenta la forma de pulso completa. Esta última es importante para determinar la separación objetivo, independientemente de la intensidad del pulso P1 de retorno.
Por desgracia, en la práctica el sistema de Kleinfelder es difícil de implementar debido a la gran cantidad de datos que deben procesarse en un tiempo relativamente corto. Además, es necesario caracterizar el rendimiento de la línea de retardo activa y particularmente de los conjuntos de circuitos de los condensadores de almacenamiento y del convertidor analógico a digital con variaciones de proceso, temperatura y tensión.
El documento US 6, 137, 566 A da a conocer un aparato para recibir señales desde un fotodetector en una matriz de fotodetectores. El aparato tiene varios comparadores conectados al fotodetector. Cada fotodetector en la matriz tiene un circuito similar conectado. Cada comparador compara la salida del fotodetector con un nivel umbral ajustable. En este documento, la adquisición de datos puede iniciarse tras la transmisión del pulso láser, usándose un reloj para accionar la adquisición descrita. Los tiempos de llegada de fotones se dividen en intervalos de tiempo correspondientes a diferentes separaciones. Cada “tic” de un contador/reloj... [Seguir leyendo]
Reivindicaciones:
1. Un método de determinación de una distancia a un objeto, incluyendo el método emitir un pulso láser dirigido hacia el objeto y recibir una reflexión de retorno desde el objeto, estando dicho método caracterizado por:
propagar una versión enclavada de un pulso de inicio (START) a través de una línea (290) de retardo por derivación que comprende una cadena conectada en serie de búferes digitales que contribuyen cada uno con un retardo de tiempo incremental al pulso de inicio enclavado y emiten una correspondiente señal de muestreo, estando dicho pulso de inicio asociado con la salida del pulso láser;
acoplar una señal de datos analógica (DATA) a uno o más comparadores (220) que emiten cada uno una señal de comparador basándose en comparar la señal de datos analógica con un respectivo umbral de nivel de señal diferente, incluyendo dicha señal de datos analógica un pulso de retorno que representa la radiación reflejada de vuelta desde el objeto;
capturar el estado de cada señal de comparador en un correspondiente registro (270) de canal que comprende un conjunto de biestables que están sincronizados individualmente con una respectiva de las señales de muestreo emitidas desde la línea (290) de retardo por derivación, de modo que el registro (270) de canal captura el estado de la señal del comparador en tiempos de muestreo correspondientes a los retardos incrementales de los búferes digitales individuales en la línea (290) de retardo por derivación, comenzando con el pulso de inicio;
determinar un primer tiempo por encima del umbral, FOT, y un tiempo total por encima del umbral, TOT, para la señal de datos analógica a partir de los estados de las una o más señales de comparador capturadas por los uno o más registros (270) de canal;
calcular una distancia al objeto en función del tiempo FOT; y
corregir la distancia calculada en función de errores derivados de fluctuaciones en la intensidad del pulso de retorno mediante consulta de una corrección de tiempo basada en el tiempo TOT.
2. El método según la reivindicación 1, en el que la consulta de la corrección de tiempo basada en el tiempo TOT comprende inferir una intensidad del pulso de retorno a partir del tiempo TOT y consultar una corrección de tiempo a partir de una tabla (250-1) de consulta almacenada de correcciones de tiempo correlacionadas con la intensidad de pulso de retorno.
3. El método según la reivindicación 1, que comprende además corregir la distancia calculada en función de errores derivados de no uniformidades de retardo de los búferes digitales individuales en la línea (290) de retardo por derivación mediante consulta de una corrección de tiempo basada en el tiempo FOT.
4. El método según la reivindicación 3, en el que la consulta de la corrección de tiempo basada en el tiempo FOT comprende consultar una corrección de tiempo a partir de una tabla (250-2) de consulta almacenada de correcciones de tiempo correlacionadas con tiempos FOT.
5. Un sistema (100) de medición de tiempo de vuelo para determinar una distancia a un objeto, incluyendo dicho sistema (100) de medición de tiempo de vuelo un transmisor (120) configurado para emitir un pulso láser dirigido hacia el objeto y un detector (170) configurado para recibir una reflexión de retorno desde el objeto, estando dicho sistema (100) de medición de tiempo de vuelo caracterizado porque comprende:
una línea (290) de retardo por derivación que comprende una cadena conectada en serie de búferes digitales adaptados para contribuir con un retardo de tiempo incremental a una versión enclavada de un pulso de inicio (START) que se propaga por dicha línea de retardo por derivación y para emitir una correspondiente señal de muestreo, estando dicho pulso de inicio asociado con la salida del pulso láser;
uno o más comparadores (220) adaptados para emitir una señal de comparador basándose en comparar una señal de datos analógica (DATA) con un respectivo umbral de nivel de señal diferente, incluyendo dicha señal de datos analógica un pulso de retorno que representa la radiación reflejada de vuelta desde el objeto;
uno o más registros (270) de canal que comprenden un conjunto de biestables que están sincronizados individualmente con una respectiva de las señales de muestreo emitidas desde los registros digitales de la línea (290) de retardo por derivación, adaptados para capturar el estado de cada señal de comparador en tiempos de muestreo correspondientes a los retardos incrementales de los búferes digitales individuales en la línea (290) de retardo por derivación, comenzando con el pulso de inicio;
y un microprocesador (240) adaptado para determinar un primer tiempo por encima del umbral, FOT, y un tiempo total por encima del umbral, TOT, para la señal de datos analógica a partir de los estados de las una o más señales de comparador capturadas por los uno o más registros (270) de canal;
calcular una distancia al objeto en función del tiempo FOT; y
corregir la distancia calculada en función de errores que se derivan de fluctuaciones en la intensidad del pulso de retorno, basándose en una consulta de una corrección de tiempo basada en el tiempo TOT.
6. El sistema (100) de medición de tiempo de vuelo según la reivindicación 5, en el que el sistema (210) de medición de intervalo de tiempo de vuelo incluye un microprocesador (240) que está configurado para calcular la distancia al objeto basándose en el tiempo FOT.
7. El sistema (100) de medición de tiempo de vuelo según la reivindicación 6, en el que el microprocesador
(240) está configurado para consultar la corrección de tiempo basada en el tiempo TOT, basándose en que dicho microprocesador (240) está configurado para inferir una intensidad del pulso de retorno a partir del tiempo TOT y consultar una corrección de tiempo a partir de una tabla (250-1) de consulta almacenada de correcciones de tiempo correlacionadas con la intensidad del pulso de retorno.
8. El sistema (100) de medición de tiempo de vuelo según la reivindicación 6, en el que el microprocesador
(240) está configurado además para corregir la distancia calculada en función de errores que se derivan de no uniformidades de retardo de los búferes digitales individuales en la línea (290) de retardo por derivación, basándose en que está configurado para consultar una corrección de tiempo basada en el tiempo FOT.
9. El sistema (100) de medición de tiempo de vuelo según la reivindicación 8, en el que el microprocesador
(240) está configurado para consultar la corrección de tiempo basada en el tiempo FOT en que está configurado para consultar una corrección de tiempo a partir de una tabla (250-2) de consulta almacenada de correcciones de tiempo correlacionadas con tiempos FOT.
Patentes similares o relacionadas:
Procedimiento y dispositivo para la realización del test de obleas de semiconductor por medio de un dispositivo de fijación atemperable, del 1 de Julio de 2020, de ERS ELECTRONIC GMBH: Procedimiento para la realización del test de obleas de semiconductor por medio de un dispositivo de fijación atemperable con las etapas: atemperado del dispositivo […]
Sistema de transporte, del 24 de Junio de 2020, de KONE CORPORATION: Sistema de transporte que comprende un circuito de seguridad, comprendiendo el circuito de seguridad una unidad de interfaz, cuya unidad de interfaz […]
Procedimiento para la vigilancia del estado de un dispositivo dinamométrico, dispositivo dinamométrico y módulo dinamométrico, del 27 de Noviembre de 2019, de METTLER-TOLEDO GMBH: Procedimiento para la determinación del estado de un dispositivo dinamométrico , en particular, un dispositivo de pesaje, con al menos un módulo dinamométrico , […]
Sistema de medición para un conductor de bajada de una pala de turbina eólica, del 13 de Noviembre de 2019, de Siemens Gamesa Renewable Energy A/S: Pala de turbina una turbina eólica, comprendiendo la pala un conductor de bajada que llega desde una punta de la pala a un bloque […]
Dispositivo de regulación de la temperatura de un módulo de pilotaje de un componente electrónico, del 6 de Noviembre de 2019, de Bibench Systems / Charlu SAS: Dispositivo de regulación de la temperatura de un módulo de pilotaje de al menos un componente electrónico destinado a estar dispuesto en el interior (INT) […]
Aeronave no tripulada y procedimiento para la realización de una medición de protección contra rayos en una instalación de energía eólica, del 23 de Octubre de 2019, de VESTAS WIND SYSTEMS A/S: Aeronave no tripulada para la realización de una medición de resistencia, de corriente y/o de tensión en un objeto, especialmente una […]
Disposición de puente de medida con detección de errores mejorada, del 9 de Octubre de 2019, de TECPHARMA LICENSING AG: Disposicion de puente de medida , comprendiendo un puente de medida con al menos un primer semipuente con una primera conexion de medicion (+UD), […]
Prueba de integridad de un medio de aislamiento en un suministro de alimentación ininterrumpida, del 24 de Julio de 2019, de INVENTIO AG: Un suministro de alimentación ininterrumpida incluyendo: una entrada para acoplar a un suministro de potencia principal ; una salida para conexión a una carga […]