Sensor optoelectrónico y procedimiento para la medición de una distancia o de una modificación de una distancia.
Sensor optoelectrónico (10) para la medición de una distancia o de una modificación de la distancia a partir de un tiempo de propagación de la luz,
que presenta lo siguiente:
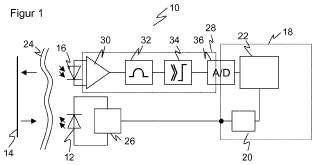
- un emisor de luz (12) para la emisión de una pluralidad de impulsos luminosos individuales consecutivos,
- un receptor de luz (16) para la recepción de los impulsos luminosos individuales reflejados o remitidos,
- una unidad de evaluación digital (22), que determina el tiempo de propagación de los impulsos luminosos individuales entre la emisión y la recepción y a partir de ello por medio de un histograma de tiempo (110) determina el tiempo de propagación de la luz, y
- un pre-procesador analógico (28), que convierte en cada caso el impulso luminoso individual recibido en el receptor de luz (16) en una señal pre-procesada bipolar y la alimenta a través de un convertidor A/D (36) a la unidad de evaluación digital (22),
caracterizadopor un circuito de retardo digital (20), para emitir a través del emisor de luz (12) impulsos luminosos individuales con un retardo definido, en el que la unidad de evaluación está configurada para determinar el tiempo de propagación de la luz de la siguiente manera:
- localización de la señal pre-procesada en una ventana de medición temporal (101), cuya anchura es la anchura total del histograma (110), a través de la representación grosera sistemática del retardo del impulso luminoso individual,
- desplazamiento de un punto de transición (112) desde un máximo hasta un mínimo o desde un mínimo hasta un máximo de la señal pre-procesada hasta un punto de observación en la ventana de medición (101), a través de ajuste fino sistemático del retardo del impulso luminoso individual, y
- cálculo del tiempo de propagación de la luz a partir del retardo necesario.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08102606.
Solicitante: SICK AG.
Nacionalidad solicitante: Alemania.
Dirección: ERWIN-SICK-STRASSE 1 79183 WALDKIRCH ALEMANIA.
Inventor/es: HUG,GOTTFRIED, HEIZMANN,REINHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 17/32).
- G01S7/487 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Extracción de las señales de eco deseadas.
- G01S7/497 G01S 7/00 […] › Medios para monitorización o calibración.
PDF original: ES-2382308_T3.pdf
Fragmento de la descripción:
Sensor optoelectrónico y procedimiento para la medición de una distancia o de una modificación de una distancia.
La invención se refiere a un sensor optoelectrónico y a un procedimiento para la medición de una distancia o de una modificación de la distancia de acuerdo con el procedimiento de tiempo de propagación de la luz de acuerdo con los preámbulos de las reivindicaciones 1 y 14, respectivamente.
La distancia de un objeto se puede determinar óptimamente de acuerdo con el principio del procedimiento del tiempo de propagación. A tal fin, se puede imprimir en un haz de luz un patrón de emisión que, a la recepción de la luz reflejada por el objeto, es comparado con un patrón de referencia generado internamente. A partir de ello se puede calcular la trayectoria de la luz y, por lo tanto, también la distancia. En la práctica, se emplean esencialmente dos procedimientos. En uno de los procedimientos, el patrón de emisión es un impulso luminoso sencillo, cuyo tiempo de propagación es medido. En el otro procedimiento, el patrón de emisión es una modulación sinusoidal, en la que la posición de las fases del seno frente a un seno de referencia de módulo corresponde al periodo del seno del tiempo de propagación.
La medición de la distancia se puede necesitar, por ejemplo, en la seguridad del vehículo, en la automatización de la logística o en la automatización de la fábrica o en la técnica de seguridad. En particular, un medidor de la distancia, que se basa en un haz de luz reflejado, puede reaccionar a una modificación de la distancia del reflector o del objetivo reflectante o remitente. Una aplicación especial es una barrera óptica de reflexión, en la que se supervisa la distancia entre el emisor de luz y el reflector.
En el procedimiento de medición considerado aquí del tiempo de propagación de la luz se pueden distinguir dos trayectorias de las señales. Sobre la trayectoria interna de la señal no existe ninguna vía luminosa, es decir, que el tiempo de propagación no depende tampoco de la distancia del objeto. Sobre una trayectoria externa de medición se suma a una componente interna del tiempo de propagación la componente interna del tiempo de propagación de la luz que depende de la distancia.
Por lo tanto, la distancia se determina precisamente a partir de la componente externa del tiempo de propagación, es decir, del intervalo de tiempo entre la emisión y la recepción del impulso luminoso. Puesto que el instante de la emisión es conocido, la medición del tiempo de propagación de la luz significa la medición del instante de la recepción. A tal fin, en el estado de la técnica se correlaciona un patrón de referencia sincronizado con el instante de la emisión con el patrón de recepción. A través de la selección precisa del retardo del instante de la emisión se pueden superponer el patrón de referencia y el patrón de emisión y a partir de ello se puede calcular el instante de la recepción.
Con esta finalidad es necesario, por una parte, retardar el instante de la emisión con una alta precisión de tiempo. Un procedimiento a tal finalidad ha sido propuesto bajo la referencia DE 10 2006 047 778.2 de la misma solicitante.
Además, la correlación del patrón de referencia y del patrón de recepción debe localizar el impulso luminoso recibido con precisión temporal correspondiente. En el estado de la técnica se emplea aquí una mezcladora analógica, que reconoce, por ejemplo, una desviación de la mejor correlación posible aprendida en primer lugar como modificación de la distancia del objetivo aprendido. De manera alternativa, la correlación puede calcular también el intervalo de tiempo entre el patrón de referencia y el patrón de recepción y a partir de ello la distancia absoluta. Pero ahora de ninguna manera está asegurada una relación suficientemente alta entre señal y ruido. Por el contrario, debido a la luz ambiental, otras fuentes de luz, especialmente también otros sensores optoelectrónicos, el nivel de interferencia puede oscilar en un intervalo de hasta seis décadas. También la señal útil puede mostrar diferencias de amplitud considerables según la distancia.
Esta dinámica de las señales no s satisface en una mezcladora analógica, de manera que el instante de la recepción no se puede determinar con suficiente exactitud. Otro inconveniente de la mezcladora analógica es que en el caso de mediciones que se suceden rápidamente, a la recepción del siguiente impulso de medición debido al impulso de medición precedente, no se retorna todavía de nuevo a un estado cero. La consecuencia es que en algunas situaciones no se puede medir ninguna distancia o la medición de la distancia permanece al menos poco exacta.
Se conoce a partir del documento WO 2005/006016 A1 un medidor de distancia por láser, que emite impulsos de emisión y amplifica en primer lugar la señal de recepción, la diferencia y la filtra. Por medio de un detector del umbral de la tensión se genera a continuación una señal binaria, en la que se codifica una porción de señal positiva “1” y una porción de señal negativa “0”. Estas señales binarias son acumuladas en repetición múltiple de mediciones individuales. A continuación se buscan a través de una evaluación del umbral los máximos en los datos acumulados y entonces su posición determina la distancia medida.
El documento WO 98/18061 A1 describe un dispositivo para la medición de tiempo para un sistema de tiempo de propagación de la luz basado en láser. El dispositivo mide con un contador el intervalo entre una señal de arranque durante la emisión y una señal de parada durante la recepción de la señal luminosa. Esta medición se puede repetir muchas veces bajo retardo artificial causal respectivo de la emisión y el valor de medición de la distancia se determina como media sobre los valores de medición individuales.
Se conoce a partir del documento EP 0 427 969 A2 una disposición de medición del tiempo de propagación del impulso, que presenta un sumador paralelo para el registro de la señal de recepción en un número de canales. Con la ayuda de un miembro diferenciador se consigue que para la determinación del instante de recepción se pueda establecer, en lugar de un máximo de la señal de entrada, una transición empinada a través de un valor medio del ruido.
Por lo tanto, el problema de la invención es posibilitar una medición de la distancia con un sensor optoelectrónico de una manera precisa y robusta contra influencias de interferencia.
Este problema se soluciona por medio de un sensor de acuerdo con la reivindicación 1 o bien por medio de un procedimiento de acuerdo con la reivindicación 14. Esta solución tiene la ventaja de que también en el caso de mala relación entre señal y ruido, es posible una determinación precisa del instante de recepción y, por lo tanto, de la distancia. De esta manera, el sensor es insensible frente a la luz perturbadora y se puede emplear sobre una zona de distancia grande. Al mismo tiempo, el núcleo de la medición se puede realizar con coste favorable y es un espacio mínimo. Debido a la evaluación digital comprimida, todo el sensor puede conseguir una estructura compacta, que hace que se pueda utilizar también allí donde no se podría adaptar al espacio en el estado de la técnica. Precisamente la evaluación de una señal bipolar no depende del nivel de recepción, en cambio una evaluación de la señal unipolar original desde el receptor de luz depende en gran medida de este nivel de recepción. Por lo tanto, de acuerdo con la invención, el instante de la recepción se puede determinar de una manera extraordinariamente precisa independientemente de las condiciones de la luz de reflexión y de la luz ambiental.
La solución de acuerdo con la invención parte de la idea básica de emitir una pluralidad de impulsos luminosos individuales y de evaluar estadísticamente su información. En este caso, la frecuencia de repetición de la emisión es suficientemente alta, para posibilitar a pesar de la medición múltiple para la generación de los datos necesarios para la estadística todavía una determinación rápida de la distancia. A través de la selección y el aprovechamiento selectivo de componentes analógicos y digitales y de un procesamiento previo de la señal para obtener una señal bipolar robusta y que se puede evaluar con exactitud se puede evaluar de una manera rápida, compacta y en un espacio mínimo con alta exactitud de medición.
Con preferencia, el sensor presenta un circuito de retardo... [Seguir leyendo]
Reivindicaciones:
1. Sensor optoelectrónico (10) para la medición de una distancia o de una modificación de la distancia a partir de un tiempo de propagación de la luz, que presenta lo siguiente:
- un emisor de luz (12) para la emisión de una pluralidad de impulsos luminosos individuales consecutivos, - un receptor de luz (16) para la recepción de los impulsos luminosos individuales reflejados o remitidos, - una unidad de evaluación digital (22) , que determina el tiempo de propagación de los impulsos luminososindividuales entre la emisión y la recepción y a partir de ello por medio de un histograma de tiempo (110) determina el tiempo de propagación de la luz, y
- un pre-procesador analógico (28) , que convierte en cada caso el impulso luminoso individual recibido en el receptor de luz (16) en una señal pre-procesada bipolar y la alimenta a través de un convertidor A/D (36) a la unidad de evaluación digital (22) ,
caracterizado por un circuito de retardo digital (20) , para emitir a través del emisor de luz (12) impulsos luminosos individuales con un retardo definido, en el que la unidad de evaluación está configurada para determinar el tiempo de propagación de la luz de la siguiente manera:
- localización de la señal pre-procesada en una ventana de medición temporal (101) , cuya anchura es la anchura total del histograma (110) , a través de la representación grosera sistemática del retardo del impulso luminoso individual,
- desplazamiento de un punto de transición (112) desde un máximo hasta un mínimo o desde un mínimo hasta un máximo de la señal pre-procesada hasta un punto de observación en la ventana de medición (101) , a través de ajuste fino sistemático del retardo del impulso luminoso individual, y
- cálculo del tiempo de propagación de la luz a partir del retardo necesario.
2. Sensor (10) de acuerdo con la reivindicación 1, que está configurado para activar el circuito de retardo digital (20) con retardos que presentan desviaciones en torno al retardo definid y solamente corresponden en el valor medio al retardo definido, para promediar un comportamiento no lineal del circuito de retardo digital (20) .
3. Sensor (10) de acuerdo con la reivindicación 1 ó 2, en el que la unidad de evaluación (22) está configurada para desplazar el punto de transición (112) durante el ajuste fino del retardo hacia el borde de la ventana de medición (101) .
4. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que el punto de transición (112) es el primer punto de anulación desde el máximo al mínimo de la señal bipolar pre-procesada.
5. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que la unidad de evaluación (22) está configurada para la determinación del instante de la recepción en una fase de aprendizaje antepuesta y para una evaluación de la modificación del punto de transición (112) frente al instante de recepción aprendido en el funcionamiento, para calcular una modificación de la distancia.
6. Sensor (10) de acuerdo con la reivindicación 5, en donde la unidad de evaluación (22) está configurada para aceptar una modificación de la distancia solamente cuando los valores del tiempo de propagación de la luz determinados a partir de una pluralidad de histogramas (110) indican un cambio en la distancia en un valor mínimo más frecuentemente que una distancia permanente.
7. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que el pre-procesador (28) presenta lo siguiente:
- un amplificador (30) , en particular un amplificador de transimpedancia, para la amplificación de la señal y/o
- un filtro (32) , en particular un filtro pasabanda o diferenciador, para la conversión de la señal eléctrica en primer lugar unipolar del receptor de luz (16) en una señal bipolar y/o
- un amplificador de limitación (34) para la amplificación de la porción positiva o bien negativa de la señal hasta un valor de saturación.
8. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que los elementos digitales (20, 22, 38) del sensor están implementados en un módulo digital, por ejemplo en una lógica programable, en ASIC o en una FPGA (18) .
9. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que la unidad de evaluación (22) presenta una memoria para mantener el tiempo de propagación hasta una distancia conocida de un objetivo de calibración.
10. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que la unidad de evaluación (22) está configurada para una determinación del nivel de recepción, especialmente como máximo sobre uno o varios histogramas (110) .
11. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que los elementos digitales (20, 22, 38) del sensor están implementados en un módulo digital como una FPGA (18) , que presenta adicionalmente una instalación digital de regulación de la temperatura (38) , que está configurada para una regulación de la temperatura, en el que en un ciclo de compensación de la temperatura en el instante de la generación del impulso luminoso individual una señal eléctrica de prueba de la temperatura es conducida hacia fuera del módulo digital (18) y de nuevo hacia dentro a través de un bucle de conductores (40) y se retarda la emisión del impulso luminoso individual en la medida de una desviación de tiempo entre el instante de información medido y el instante de información previsto de la señal de prueba de la temperatura.
12. Sensor (10) de acuerdo con la reivindicación 11, en el que el sensor (10) está configurado para una realización del ciclo de compensación de la temperatura, respectivamente, después de una pluralidad de impulsos luminosos individuales emitidos, en particular de todos los impulsos luminosos individuales, que forman un histograma (110) .
13. Sensor (10) de acuerdo con una de las reivindicaciones anteriores, en el que el sensor (10) presenta una instalación de compensación de las interferencias (20, 22) , que puede variar los intervalos de tiempo entre los impulsos luminosos individuales en la medida de un desplazamiento sistemática y/o un desplazamiento aleatorio, en el que la unidad de evaluación (22) está configurada para tener en cuenta el desplazamiento.
14. Procedimiento para la medición de la distancia o de una modificación de la distancia a partir de un tiempo de propagación de la luz de un impulso luminoso, en el que se emiten de forma sucesiva una pluralidad de impulsos luminosos individuales y se determina el tiempo de propagación de la luz a partir de un histograma temporal (110) de los tiempos de propagación entre la emisión y la recepción de los impulsos luminosos individuales, y en el que los impulsos luminosos individuales recibidos son transformados de manera análoga a una señal pre-procesada bipolar y son evaluados digitalmente después de una linealización, caracterizado porque el tiempo de propagación de la luz se determina de la siguiente manera:
- localización de la señal pre-procesada en una ventana de medición temporal (101) , cuya anchura es la anchura total del histograma (110) , a través de la representación grosera sistemática del retardo del impulso luminoso individual,
- desplazamiento de un punto de transición (112) desde un máximo hasta un mínimo o desde un mínimo hasta un máximo de la señal pre-procesada hasta un punto de observación en la ventana de medición (101) , en particular el borde de la ventana de medición, a través de ajuste fino sistemático del retardo del impulso luminoso individual, y
- cálculo del tiempo de propagación de la luz a partir del retardo necesario.
15. Procedimiento de acuerdo con la reivindicación 14, en el que el punto de transición (112) es el primer punto de anulación desde el máximo hacia el mínimo de la señal bipolar pre-procesada.
16. Procedimiento de acuerdo con la reivindicación 14 ó 15, en el que la evaluación digital es implementada en un módulo digital, por ejemplo en lógica programable, en ASIC o en un FPGA (18) .
17. Procedimiento de acuerdo con la reivindicación 16, en el que se realiza una regulación (38, 40, 20) para las oscilaciones de la temperatura, en el que en un ciclo de compensación de la temperatura en el instante de la generación del impulso luminoso individual, una señal eléctrica de prueba de la temperatura es conducida hacia fuera del módulo digital (18) y de nuevo hacia dentro a través de un bucle de conductores (40) y se retarda la emisión del impulso luminoso individual en la medida de una desviación de tiempo entre el instante de información medido y el instante de información previsto de la señal de prueba de la temperatura.
18. Procedimiento de acuerdo con una de las reivindicaciones 14 a 17, en el que los intervalos de tiempo entre los impulsos luminosos individuales son variados para una compensación de las interferencias en la medida de un desplazamiento sistemático y/o aleatorio.
Patentes similares o relacionadas:
Sistema y método de medición de coordenadas, del 15 de Julio de 2020, de NPL Management Limited: Un sistema de deteccion de posicion para detectar la posicion tridimensional de una pluralidad de objetivos , que incluye: una pluralidad de objetivos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Procedimiento y dispositivo para asegurar un espacio atravesado por un haz láser de alta potencia, del 3 de Julio de 2019, de ArianeGroup SAS: Procedimiento para asegurar un espacio atravesado por un haz láser de alta potencia: caracterizado por que: • se genera al menos un haz […]
Procedimiento y dispositivo para la determinación de la posición de un sensor, del 17 de Mayo de 2019, de Carl Zeiss Optotechnik GmbH: Procedimiento para la determinación de la posición en el espacio de un sensor en diferentes posiciones de captación, en el que, para la determinación […]
Sistema de referencia de posición y método para posicionar y seguir uno o más objetos, del 1 de Mayo de 2019, de KONGSBERG SEATEX AS: Método para posicionar y seguir uno o más objetos por medio de una unidad de transceptor fijada a una plataforma del sensor, tal como un objeto o embarcación, y uno […]
Corrección de ganancia basada en una fuente de luz embarcada para buscadores de láser semi-activos, del 7 de Marzo de 2018, de BAE SYSTEMS INFORMATION AND ELECTRONIC SYSTEMS INTEGRATION, INC.: Un sistema de guiado de un vehículo que comprende: una fuente de luz de calibración a bordo del sistema de guiado de un vehículo, una pluralidad […]