ROBOT TREPADOR EQUIPADO CON UNA UNIDAD DE TRABAJO, Y EQUIPO DE GOBIERNO DE TALES ROBOTS TREPADORES.
Robot trepador equipado con una unidad de trabajo, y equipo de gobierno de tales robots trepadores.
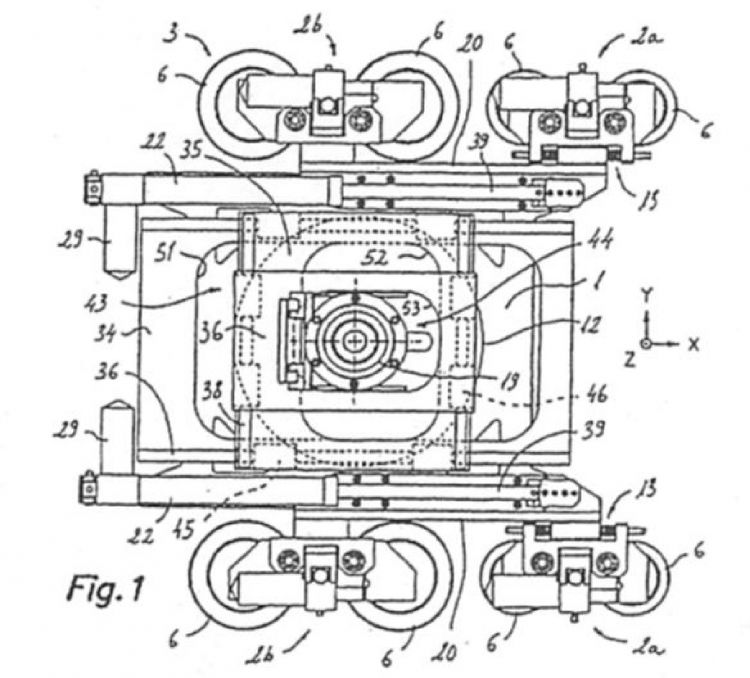
El robot comprende un chasis (1) con un primer conjunto de patas (2a, 2b) con ventosas (6) sobre soportes basculantes (7) montado de manera desplazable linealmente respecto al chasis y un segundo conjunto de patas (4) con ventosas (17) montado de manera giratoria respecto al chasis. Unos medios de control están adaptados para controlar el funcionamiento de dichos primer y segundo conjuntos de patas de manera coordinada para desplazar el chasis en cualquier dirección sobre la superficie de trabajo (S). Incluye pies de apoyo (9) y un sistema para nivelar el chasis en relación con una curvatura de la superficie de trabajo. Sobre el chasis está instalada una unidad de trabajo (44) con un cabezal (19) para trabajar en la superficie de trabajo a través de una abertura (12) del chasis. Incluye medios para desplazar dicho cabezal en tres ejes y pivotar el cabezal en dos ejes respecto al chasis
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200602075.
Solicitante: AIRBUS ESPAA S.L..
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: MONTERO SAN JUAN,PEDRO, RAMALLO GUTIERREZ,JOSE LUIS.
Fecha de Solicitud: 31 de Julio de 2006.
Fecha de Publicación: .
Fecha de Concesión: 8 de Junio de 2010.
Clasificación Internacional de Patentes:
- B62D57/024 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
Clasificación PCT:
- B62D57/024 B62D 57/00 […] › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
Fragmento de la descripción:
Robot trepador equipado con una unidad de trabajo, y equipo de gobierno de tales robots trepadores.
Campo de la técnica
La presente invención concierne a un robot trepador equipado con una unidad de trabajo, siendo dicho robot capaz de desplazarse por una superficie lisa curvada, posicionarse en diferentes lugares de trabajo predeterminados de dicha superficie y efectuar un trabajo en uno o más sitios de operación en cada uno de dichos lugares de trabajo. La presente invención también concierne a un equipo de gobierno de tales robots que incluye al menos un primer robot adaptado para realizar una o más etapas precedentes de dicho trabajo en los sitios predeterminados y un segundo robot adaptado para realizar posteriormente una o más etapas subsiguientes del trabajo en los mismos sitios predeterminados, estando ambos primer y segundo robots gobernados por unos medios de control para desplazarse y trabajar coordinadamente sobre la superficie de trabajo.
En general el robot trepador y el equipo de robots trepadores de la presente invención tienen aplicación en cualquier sector de la industria y en particular, en el campo de la aeronáutica.
Estado de la técnica
En varios campos de la técnica existe la necesidad de disponer de robots trepadores capaces de trepar por superficies lisas fuertemente inclinadas, verticales o incluso desplomadas. Se conocen numerosos robots provistos de ventosas adaptados para trepar, por ejemplo, por fachadas acristalas de edificios con el propósito de efectuar tareas de limpieza o similares. Las superficies acristaladas suelen ser lisas y planas. Sin embargo, cuando las superficies de trabajo son curvadas, el desplazamiento de tales robots sobre las mismas presenta una problemática considerablemente mayor.
La solicitud de patente internacional WO 94/26540 describe un robot provisto de bandas de rodadura sinfín de tipo "oruga" equipadas con ventosas adaptadas para acoplarse a la superficie de trabajo a medida que las bandas sinfín van rodando. Este robot trepador está destinado a efectuar inspecciones no destructivas y operaciones de limpieza sobre superficies exteriores de aeronaves. Las superficies exteriores de una aeronave son curvadas y a menudo tienen dos o más direcciones de curvatura. Para efectuar virajes, los vehículos equipados con bandas sinfín en general deben mover las dos bandas sinfín a velocidades diferentes o en direcciones opuestas, y las bandas sinfín patinan sobre el suelo durante el viraje. Un inconveniente que presentan los robots equipados con bandas sinfín y ventosas unidas a la misma es la dificultad de efectuar virajes a causa de la resistencia que oponen las ventosas a patinar cuando están acopladas a la superficie.
La patente US-A-6105695 describe un robot trepador previsto para tareas de detección de desperfectos e inspección de reparaciones en aeronaves, aunque también es aplicable al manejo de materiales peligrosos, tales como tóxicos y explosivos. Este robot incorpora un sistema de locomoción por pasos que comprende una plataforma, un primer conjunto de patas montado de manera desplazable linealmente respecto a la plataforma y provisto de un primer dispositivo de acoplamiento por succión adaptado para acoplar intermitentemente dicho primer conjunto de patas a la superficie de trabajo, y un segundo conjunto de patas montado de manera giratoria y desplazable linealmente respecto al plataforma y provisto de un segundo dispositivo de acoplamiento por succión adaptado para acoplar intermitentemente dicho segundo conjunto de patas a la superficie de trabajo. Cada pata del primer y segundo conjunto de patas está montada de manera extensible hacia la superficie de trabajo, y retraíble respecto a la misma. El robot incluye medios de accionamiento para mover los conjuntos de patas respecto a la plataforma y medios de activación conectados a una fuente de aspiración para activar selectivamente dichos primer y segundo dispositivos de acoplamiento por succión, cada uno de los cuales comprende una o más ventosas. El robot lleva unos medios de control adaptados para controlar el funcionamiento de los medios de activación y de los medios de accionamiento de manera coordinada para desplazar la plataforma en cualquier dirección sobre la superficie de trabajo. El sistema de locomoción es el siguiente. Cuando las ventosas, supongamos, del primer conjunto de patas están acopladas a la superficie de trabajo, el segundo conjunto de patas se desacopla, se retrae y se desplaza linealmente respecto a la plataforma. Entonces, el segundo conjunto de patas se extiende y sus ventosas se acoplan a la superficie de trabajo. A continuación, las ventosas del primer conjunto de patas se desacoplan, el primer conjunto de patas se retrae y se desplaza linealmente respecto a la plataforma, y seguidamente el primer conjunto de patas se extiende y sus ventosas se acoplan a la superficie de trabajo, completando con ello un paso y dejando el robot preparado para el paso siguiente que es una repetición del anterior. Los virajes se efectúan girando el segundo conjunto de patas respecto a la plataforma cuando las ventosas de un único conjunto de patas están acopladas a la superficie de trabajo.
El sistema de locomoción por pasos descrito en la citada patente US-A-6105695 tiene un precedente en una plataforma "caminadora" utilizable para desplazar grandes cargas por un suelo plano, descrita en la patente US-A4321976.
Sin embargo, la citada patente US-A-6105695, la cual constituye el estado de la técnica más próximo, no describe ningún sistema específico para nivelar la plataforma del robot en relación con una superficie de trabajo curvada ni para posicionar con precisión una unidad de trabajo llevada por el robot en relación con un sitio de operación en un lugar de trabajo sobre dicha superficie de trabajo curvada.
En la industria de la construcción aeronáutica existe la necesidad de disponer de robots capaces de trepar sobre superficies de un fuselaje o parte de un fuselaje, u otras partes de una aeronave en construcción para realizar trabajos sobre las mismas. Uno de los trabajos a realizar habitualmente consiste en unir dos o más paneles parcialmente superpuestos mediante remaches, lo que implica realizar en primer lugar unos taladros, eventualmente escariados y avellanados, y a continuación insertar y fijar los remaches en los taladros. Este trabajo requiere disponer de al menos de un cabezal de taladrado y un cabezal de colocación y fijación de remaches. Estos cabezales, en el momento de efectuar el trabajo, deben estar lo más perpendiculares posible al sitio de la superficie de trabajo donde se requiere efectuar la operación. En una superficie de trabajo curvada en una, dos o más direcciones, la posición de los cabezales de trabajo debe ser perpendicular a un plano tangente a la superficie de trabajo en el sitio de operación.
La presente invención tiene por objeto contribuir a satisfacer la mencionada necesidad de la industria de la construcción aeronáutica, así como otras necesidades en el campo de la aeronáutica y otros campos donde sea preciso realizar trabajos en lugares de difícil acceso o en entornos peligrosos.
Descripción de la invención
De acuerdo con un primer aspecto, la presente invención aporta un robot trepador equipado con una unidad de trabajo del tipo que comprende un chasis, el cual tiene referenciados imaginariamente tres ejes coordenados X, Y, Z, donde el eje X está alineado con una dirección de avance de dicho chasis y el eje Z está dirigido hacia una superficie de trabajo sobre la que se desplaza el robot; un primer conjunto de patas montado de manera desplazable linealmente en la dirección del eje X respecto al chasis y provisto de un primer dispositivo de acoplamiento por succión adaptado para acoplar intermitentemente dicho primer conjunto de patas a la superficie de trabajo, estando cada pata del primer conjunto de patas montado de manera extensible en la dirección del eje Z hacia la superficie de trabajo, y retraíble de la misma, respecto al chasis y un segundo conjunto de patas montado de manera giratoria alrededor de un eje Z respecto al chasis y provisto de un segundo dispositivo de acoplamiento por succión adaptado para acoplar intermitentemente dicho segundo conjunto de patas a la superficie de trabajo. El robot incluye unos primeros y segundos medios de activación conectados a una fuente de aspiración para activar selectivamente dichos primer y segundo dispositivos de acoplamiento por succión; unos primeros medios de accionamiento para desplazar linealmente el primer conjunto de patas respecto al chasis; unos segundos medios de accionamiento para accionar individualmente una extensión...
Reivindicaciones:
1. Robot trepador equipado con una unidad de trabajo, del tipo que comprende:
un chasis (1), el cual tiene referenciados imaginariamente tres ejes coordenados X, Y, Z, donde el eje X está alineado con una dirección de avance de dicho chasis (1) y el eje Z está dirigido hacia una superficie de trabajo (S) sobre la que se desplaza el robot;
un primer conjunto de patas (2a, 2b) montado de manera desplazable linealmente en la dirección del eje X respecto al chasis (1) y provisto de un primer dispositivo de acoplamiento por succión (3) adaptado para acoplar intermitentemente dicho primer conjunto de patas (2a, 2b) a la superficie de trabajo (S), estando cada pata (2a, 2b) del primer conjunto de patas (2a, 2b) montado de manera extensible en la dirección del eje Z hacia la superficie de trabajo (S), y retraíble de la misma, respecto al chasis (1);
un segundo conjunto de patas (4) montado de manera giratoria alrededor de un eje paralelo al eje Z respecto al chasis (1) y provisto de un segundo dispositivo de acoplamiento por succión (5) adaptado para acoplar intermitentemente dicho segundo conjunto de patas (4) a la superficie de trabajo (S);
unos primeros y segundos medios de activación conectados a una fuente de aspiración para activar selectivamente dicho primer y segundo dispositivo de acoplamiento por succión (3, 5);
unos primeros medios de accionamiento para desplazar linealmente el primer conjunto de patas (2a, 2b) respecto al chasis (1);
unos segundos medios de accionamiento para accionar individualmente un movimiento seleccionado entre una extensión y una retracción de cada pata (2a, 2b) del primer conjunto de patas (2a, 2b) respecto al chasis (1);
unos terceros medios de accionamiento para hacer girar el segundo conjunto de patas (4) respecto al chasis (1); y
unos medios de control adaptados para controlar el funcionamiento de dichos primeros y segundos medios de activación y dichos primeros, segundos y terceros medios de accionamiento de manera coordinada para desplazar el chasis (1) en cualquier dirección sobre la superficie de trabajo (S),
caracterizado porque:
cada uno de dichos primeros dispositivos de acoplamiento por succión (3), comprende al menos dos ventosas (6) unidas a un soporte basculante (7) unido articuladamente a un extremo de la correspondiente pata (2a, 2b) del primer conjunto de patas (2a, 2b) de manera que puede bascular libremente respecto a un eje (8) paralelo al eje Y;
a cada soporte basculante (7) está unido un pie (9) situado entre dichas dos ventosas (6) y configurado y dispuesto para apoyar sobre la superficie de trabajo (S) cuando las dos ventosas (6) están acopladas a la superficie de trabajo (S);
al menos un primer y segundo elemento sensor (10, 11) están dispuestos respectivamente en un primer y segundo punto separados del chasis (1) para detectar la distancia en la dirección del eje Z desde cada uno de dichos primer y segundo puntos del chasis (1) a la superficie de trabajo (S) y enviar unas señales representativas de dichas distancias a dichos medios de control;
sobre el chasis (1) está instalado un dispositivo de soporte móvil que soporta una unidad de trabajo provista de un cabezal (19) dispuesto para trabajar en la superficie de trabajo (S) a través de una abertura (12) existente en el chasis (1), incluyendo dicho dispositivo de soporte móvil medios de guía y medios de accionamiento para desplazar al menos dicho cabezal (19) en las direcciones de los tres ejes coordenados X, Y, Z y pivotar el cabezal (19) alrededor de dos ejes X, Y dentro de la abertura (12).
2. Robot, de acuerdo con la reivindicación 1, caracterizado porque dichos medios de control están adaptados para controlar el funcionamiento de los segundos medios de accionamiento en función de dichas señales recibidas de dichos primer y segundo elementos sensores (10, 11) para efectuar una nivelación del chasis (1) en relación con la superficie de trabajo (S).
3. Robot, de acuerdo con la reivindicación 2, caracterizado porque el primer conjunto de patas (2a, 2b) tiene un subconjunto de patas delanteras (2a) y un subconjunto de patas traseras (2b), y porque las patas (2a) de uno de dichos subconjuntos de patas delanteras y traseras (2a, 2b) están montadas sobre unos respectivos dispositivos de guía (13) para un desplazamiento lineal en la dirección del eje X respecto a las patas (2b) del otro de los subconjuntos de patas delanteras y traseras (2a, 2b), y unos miembros elásticos (14) están dispuestos para empujar en direcciones opuestas cada pata (2a) hacia una zona media de dicho dispositivo de guía (13), efectuándose dichos desplazamientos de la pata (2a) libremente contra la fuerza de dichos miembros elásticos (14) para acomodar una variación en la distancia entre los subconjuntos de patas delanteras y traseras (2a, 2b) producida a consecuencia de dicha nivelación del chasis (1) cuando los primeros dispositivos de acoplamiento por succión (3) están activados.
4. Robot, de acuerdo con la reivindicación 3, caracterizado porque los subconjuntos de patas delanteras y traseras (2a, 2b) tienen dos patas cada uno a cada lado del chasis (1), estando las patas delanteras (2a) y las patas traseras (2b) de cada lado montadas sobre un soporte deslizante (20) acoplado al chasis (1) mediante un dispositivo de guía lineal (21) en la dirección del eje X y conectado a un actuador lineal (22).
5. Robot, de acuerdo con la reivindicación 4, caracterizado porque cada pata delantera y trasera (2a, 2b) de los subconjuntos de patas delanteras y traseras (2a, 2b) comprende un soporte móvil (23) al que está unido articuladamente dicho soporte basculante (7), estando dicho soporte móvil (23) acoplado al chasis (1) mediante un dispositivo de guía lineal (24) en la dirección del eje Z y conectado a un actuador lineal (25).
6. Robot, de acuerdo con la reivindicación 1, caracterizado porque cada uno de dichos pies (9) está unido al correspondiente soporte basculante (7) mediante una articulación alrededor de un eje (15) paralelo al eje X.
7. Robot, de acuerdo con la reivindicación 1, caracterizado porque cada uno de dichos pies (9) está asociado a un sensor de contacto (16) capaz de enviar una señal representativa de la existencia o no existencia de contacto entre el pie (9) y la superficie de trabajo (S) a los medios de control.
8. Robot, de acuerdo con la reivindicación 1, caracterizado porque el segundo dispositivo de acoplamiento por succión (5) del segundo conjunto de patas (4) comprende una pluralidad de ventosas (17) instaladas en un soporte anular giratorio (18) acoplado al chasis (1) mediante un dispositivo de guía giratorio alrededor del eje Z y conectado a un motor (27), teniendo dicho soporte anular giratorio (18) y dicho dispositivo de guía giratorio unas respectivas aberturas centrales dispuestas para abarcar en su interior la abertura (12) existente en el chasis (1).
9. Robot, de acuerdo con la reivindicación 8, caracterizado porque la abertura (12), así como dichos medios de guía de dicho dispositivo de soporte móvil, están dimensionados para permitir unos desplazamientos del cabezal (19) en las direcciones de los ejes X, Y dentro de la abertura (12) suficientemente amplios como para efectuar trabajos en uno o más puntos diferentes de la superficie de trabajo (S) sin necesidad de efectuar desplazamientos del chasis (1) en relación con la superficie de trabajo (S).
10. Robot, de acuerdo con la reivindicación 9, caracterizado porque dichos medios de accionamiento del dispositivo de soporte móvil están adaptados para posicionar un eje de trabajo del cabezal (19) en relación con la estructura (S) con una precisión de al menos
11. Robot, de acuerdo con la reivindicación 1, caracterizado porque en el chasis (1) y/o en el dispositivo de soporte móvil que soporta dicha unidad de trabajo está instalado un dispositivo de detección de marcas en comunicación con dichos medios de control para efectuar un seguimiento de marcas sobre la superficie de trabajo (S).
12. Robot, de acuerdo con la reivindicación 1, caracterizado porque en el chasis (1) y/o en el dispositivo de soporte móvil que soporta dicha unidad de trabajo está instalado un receptor-emisor en comunicación con un sistema de posicionamiento global de interior, estando dicho receptor-emisor adaptado para enviar unas señales representativas de la posición del receptor-emisor en relación con dicho sistema de posicionamiento global de interior a dichos medios de control para guiar los desplazamientos del chasis (1) sobre la superficie de trabajo (S).
13. Robot según la reivindicación 1, caracterizado porque dichas ventosas (6) se encuentran unidas articuladamente a dicho soporte basculante (7) de cada uno de dichos primeros dispositivos de acoplamiento por succión (3), para que basculen libre e independientemente respecto al soporte basculante (7) al menos con un primer grado de libertad alrededor de un primer eje (103).
14. Robot según la reivindicación 13, caracterizado porque dichas ventosas (6) se encuentran unidas articuladamente a dicho soporte basculante (7) de cada uno de dichos primeros dispositivos de acoplamiento por succión (3), para que puedan bascular independientemente respecto al soporte basculante (7) con un segundo grado de libertad alrededor de un segundo eje (102).
15. Robot según la reivindicación 14, caracterizado porque dicho segundo eje (102) es perpendicular a dicho primer eje (103).
16. Robot según la reivindicación 13, 14 ó 15, caracterizado porque dicho primer eje (103) es paralelo al eje Y, cuando la ventosa (6) a la que se encuentra asociado está en una posición de no basculación respecto a dicho segundo eje (102).
17. Robot según la reivindicación 16, caracterizado porque cada una de dichas ventosas (6) se encuentra fijada por su extremo superior a un apéndice de soporte (101), parte del cual se encuentra insertado en un marco (100) introducido en una cavidad de dicho soporte basculante (7), y unido a dicho marco (100) mediante dicho primer eje (103), el cual emerge de dicha pieza de soporte (101) y se encuentra dispuesto perpendicularmente y fijado por sus extremos a unas respectivas paredes de dicho marco (100), para permitir la basculación de dicha pieza de soporte (101), y con ésta la de la ventosa (6), respecto al marco (100) alrededor del primer eje (103).
18. Robot según la reivindicación 17, caracterizado porque dicho marco (100) se encuentra unido a dicho soporte basculante (7) mediante dicho segundo eje (102), el cual se encuentra dispuesto perpendicularmente y fijado por sus extremos a unas respectivas paredes de dicho soporte basculante (7) delimitadoras de dicha cavidad, para permitir la basculación del marco (100), y con éste la de la ventosa (6), respecto al miembro de soporte (7), alrededor del segundo eje (102).
19. Robot según la reivindicación 18, caracterizado porque comprende al menos un elemento de resorte (R) fijado por un extremo al marco (100) y por el otro a una pared delimitadora de dicha cavidad del soporte basculante (7), para que dicho elemento de resorte (R) actúe contra el movimiento de basculación en un sentido del marco (100) respecto al segundo eje (102).
20. Robot según la reivindicación 8, caracterizado porque dicha pluralidad de ventosas (17) de dichos segundos dispositivos de acoplamiento por succión (5) se encuentran instaladas por parejas en varios bloques (32) unidos a dicho soporte anular giratorio (18).
21. Robot según la reivindicación 20, caracterizado porque cada uno de dichos bloques (32) comprende una primera pieza (32a) fijada firmemente al soporte anular giratorio (18), y una segunda pieza (32b), a la que se encuentran unidas dos de dichas ventosa (17), unida articuladamente a dicha primera pieza (32a), para que pueda bascular libremente respecto a un tercer eje (105) contenido en un plano paralelo al del soporte anular giratorio (18).
22. Robot según la reivindicación 21, caracterizado porque cada uno de dichos bloques (32) comprende dos terceras piezas (32c) cada una de ellas unida a un extremo superior de una respectiva ventosa (17) por su extremo superior, estando cada pareja de dichas terceras piezas (32c) unida de manera articulada libre e independientemente respecto a la segunda pieza (32b), al menos con un primer grado de libertad alrededor de un cuarto eje (106) perpendicular a dicho tercer eje (105).
23. Robot según la reivindicación 22, caracterizado porque cada una de dichas ventosas (17) se encuentra unida de manera articulada a una de dichas terceras piezas (32c) a través de un quinto eje (107) perpendicular a dicho cuarto eje (106).
24. Equipo de robots trepadores, incluyendo dicho equipo una pluralidad de robots trepadores equipados con una unidad de trabajo de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque dicho equipo comprende al menos un primer robot equipado con una primera unidad de trabajo adaptada para efectuar una o más etapas precedentes de un trabajo y un segundo robot equipado con una segunda unidad de trabajo adaptada para efectuar una o más etapas subsiguientes de dicho trabajo, estando dichos medios de control adaptados para desplazar dicho primer robot hasta un lugar de trabajo predeterminado y selectivamente de forma consecutiva hasta varios lugares de trabajo predeterminados sobre la superficie de trabajo y efectuar en uno o más sitios de operación comprendidos en cada uno de dichos lugares de trabajo las mencionadas una o más etapas precedentes y para desplazar subsiguientemente dicho segundo robot hasta el mismo lugar de trabajo y selectivamente hasta los mismos lugares de trabajo y efectuar en dichos uno o más sitios de operación comprendidos en cada uno de los lugares de trabajo dichas una o más etapas subsiguientes.
25. Equipo de robots, de acuerdo con la reivindicación 24, caracterizado porque dicho trabajo comprende unir al menos dos paneles mediante remaches.
26. Equipo de robots, de acuerdo con la reivindicación 25, caracterizado porque dicha primera unidad de trabajo llevada por el primer robot comprende al menos un cabezal de taladrado, escariado y avellanado, y dicha segunda unidad de trabajo llevada por el segundo robot comprende al menos un cabezal de colocación y fijación de remaches.
27. Equipo de robots, de acuerdo con la reivindicación 26, caracterizado porque dicha primera unidad de trabajo llevada por el primer robot comprende un dispositivo de aspiración de virutas para aspirar virutas producidas por dicho cabezal de taladrado, escariado y avellanado.
28. Equipo de robots, de acuerdo con la reivindicación 27, caracterizado porque dicha primera unidad de trabajo llevada por el primer robot comprende un dispositivo para detectar una distancia entre el cabezal de taladrado, escariado y avellanado y la superficie de trabajo en el sitio de operación y un dispositivo para controlar un movimiento de avance del cabezal en función del resultado de dicha detección.
29. Equipo de robots, de acuerdo con la reivindicación 26, caracterizado porque dicha segunda unidad de trabajo llevada por el segundo robot comprende además un dispositivo de aplicación de material de sellado para aplicar un material de sellado a un taladro antes de la colocación de un remache en dicho taladro.
Patentes similares o relacionadas:
Sistema robótico y métodos para tareas de mantenimiento en farolas y estructuras verticales de forma cónica, del 11 de Mayo de 2020, de FCC INDUSTRIAL E INFRAESTRUCTURAS ENERGETICAS, S.A.U: Un sistema robótico destinado a realizar de manera autónoma las tareas de mantenimiento de farolas o estructuras verticales con forma cónica o similar, como por ejemplo el pintado […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza, del 20 de Febrero de 2019, de Fleet Cleaner Holding B.V: Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador: - un bastidor que comprende un eje […]
Robot escalador para mástiles, del 7 de Marzo de 2018, de Fachhochschule Aachen: Robot escalador para mástiles/torres , en particular para aerogeneradores, que comprende al menos un primer dispositivo de soporte y al […]
Dispositivo para salvar un obstáculo durante el desplazamiento, del 1 de Febrero de 2017, de VORWERK & CO. INTERHOLDING GMBH: Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el […]
Máquina-útil que comprende un carril longitudinal y un brazo transversal, del 24 de Agosto de 2016, de AIRBUS OPERATIONS: Máquina-útil para la realización de operaciones sobre una pieza que comprende: * un carril longitudinal configurado para ser posicionado frente a la pieza, […]
Robot magnético móvil con hueco de aire, del 18 de Febrero de 2015, de Chariot Robotics, LLC: Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis […]
Instalación para el montaje de piezas de carrocería, del 16 de Octubre de 2013, de ThyssenKrupp System Engineering GmbH: Instalación para el montaje de una carrocería de vehículo, que comprende: - una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a […]