ROBOT TREPADOR LIMPIADOR.
El robot trepador limpiador permite realizar trabajos de limpieza en lugares de difícil acceso y peligrosos para las personas.
El uso preferente para el que está diseñado es el de la limpieza de torres eólicas. El robot trepador limpiador incorpora un sistema de desplazamiento basado en unas ruedas motrices que permiten el movimiento a lo largo de abscisas y coordenadas por medio del agarre sin rozamiento de un sistema magnético dinámico. Asimismo posee un mecanismo de limpieza mediante vapor, adaptado a un proceso especifico de limpieza
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200602245.
Solicitante: VENTOL ESPAÑA S.L.
Nacionalidad solicitante: España.
Inventor/es: PEREZ MOURE,MANUEL.
Fecha de Solicitud: 11 de Agosto de 2006.
Fecha de Publicación: .
Fecha de Concesión: 15 de Diciembre de 2010.
Clasificación Internacional de Patentes:
- B62D57/024 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
- B63B59/10 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 59/00 Protección de cascos especialmente adaptada para barcos; Dispositivos de limpieza especialmente adaptados para barcos. › utilizando carros transportadores o dispositivos análogos que se desplazan a lo largo de la superficie.
- E04G23/00B
- F03D1/00C
Clasificación PCT:
- B62D57/024 B62D 57/00 […] › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
Fragmento de la descripción:
Robot trepador limpiador.
La presente invención se refiere a un robot trepador limpiador destinado a la realización de trabajos de limpieza en lugares de difícil acceso y peligroso para trabajadores y técnicos. Los lugares en los cuales puede trabajar el robot trepador limpiador son muy diversos: torres eólicas, cascos de barcos, chimeneas metálicas, exterior de edificios acristalados y en cualquier superficie plana, ovalada o acristalada, pudiendo limpiar cualquier liquido (aceites o grasas) y pequeños sólidos adheridos a la superficie. La presente invención surge ante la necesidad de encontrar medios seguros para el mantenimiento de torres eólicas, que actualmente supone que el personal de mantenimiento deba trabajar a 100 m. de altura con métodos poco fiables y/o peligrosos (cuerdas, andamios poco fiables) y/o muy costosos (plataforma vehiculizada). La siguiente invención está basada en 4 ruedas motrices por motor eléctrico de control individual y movimiento en grupos de 2. Un sistema magnético dinámico nos permitirá desplazamos verticalmente hasta una altura de 100 metros, además de poder trasladamos de izquierda a derecha.
Sector de la técnica
La presente invención se enmarca en el sector técnico de los sistemas de limpieza de torres eólicas así como de maquinaria y equipamiento industrial que emplean medios robóticos en especial de los robots operados a distancia, destinados a tal fin.
Estado de la técnica
Actualmente, para realizar limpiezas en lugares inaccesiblemente altos, habitualmente se limpia de modo manual, descolgándose el operario por la estructura a limpiar, resultando este método inapropiado y lento. Gracias al robot trepador deslizante manejado por una persona desde lugar seguro, podemos limpiar cualquier superficie plana u ovalada metálica con la peculiaridad de poder recuperar el 100% de los distintos líquidos necesarios en la lim- pieza.
En el sector de la limpieza mediante robots podemos encontrar algunos destinados de la limpieza de conductos de aire acondicionado (solicitud de patente nº U200500972 o solicitud de patente nº P200400005) o chimeneas industriales (solicitud número P20001191) que incorporan elementos de tracción que permiten que los robots trabajen con autonomía y puedan ser dirigidos a distancia. Esta es una técnica que necesariamente debe tener un equipo que tenga como fin el acceso para la limpieza a zonas en las que existan dificultad o peligrosidad para el acceso de personas. Sin embargo en este punto debe destacarse que un elemento diferenciador y relevante es el diseño del sistema magnético dinámico que lleva el robot y que permite asegurar no sólo la adhesión del equipo al objeto a limpiar, sino también unas condiciones de maniobra o desplazamiento que no pueden ofrecer sistemas de limpieza robotizados que empleen como medio de desplazamiento únicamente ruedas o mecanismos de tracción, sobre todo si se tiene en cuenta que el vehículo debe desplazarse verticalmente a alturas de aproximadamente 100 metros.
En este sector se pueden encontrar diversos modelos de robots destinados a diferentes fines y que incorporen mecanismos de desplazamiento variados. El principio de sujeción mediante imanes puede también verse empleado (v. solicitud nº P200201666) sin embargo la aplicación que sé hace del mismo en el presente invento guarda la debida altura inventiva en cuanto a la forma de interactuar en el robot y de los sistemas preferentes de mantenimiento a los que estará destinado, como son las torres eólicas de alturas elevadas (actualmente hasta 100 metros), ya que el mecanismo de sujeción y desplazamiento característico de este robot así lo permite. El solicitante y el inventor son los mismos titulares de la solicitud de patente 200503223, que se refiere a un robot destinado igualmente a la limpieza de torres eólicas, que se diferencia en el sistema de desplazamiento con el presente invento, y que incorpora un sistema de limpieza distinto y adaptado a las características del robot trepador deslizante.
Descripción detallada de la invención
La siguiente invención de robot trepador deslizante, permite la limpieza exterior de torres eólicas con total seguridad para los operarios y manteniendo la integridad de la máquina.
El robot trepador deslizante incorpora 2 potentes focos para poder visionar en todo momento la superficie por la que se desplaza. Esta visión es posible gracias a una cámara de alta definición que nos permitirá también controlar la navegación y el acabado del trabajo de limpieza realizado el robot trepador deslizante consta de un chasis monoviga realizado en aluminio reforzado de alta resistencia con 2 articulaciones en sus extremos que implementan la dirección. En los ejes de dirección se disponen de cuatro 4 ruedas motrices que pueden variar de velocidad, esto es, de velocidad regulable. El desplazamiento vertical por la superficie de las torres eólicas se asegura mediante un sistema magnético dinámico, que garantiza la evolución vertical del robot trepador deslizante sobre la torre y garantiza su total adherencia a la superficie.
Los movimientos de robot trepador deslizante se siguen a través de un panel de mandos, provisto de indicadores de movimiento y posición y desde el cual el operario puede dirigir la máquina. Desde este panel se pueden comandar los distintos movimientos para los cuales se ha desarrollado el robot trepador deslizante:
Desde un segundo panel de mandos inalámbrico, vía radio, el operario puede realizar todas estas operaciones. Este equipo de control incorpora un sistema de alimentación por batería o red eléctrica. El HMI está basado en pantalla táctil sobre arquitectura PC. Las comunicaciones se han implementado sobre una red WIFI, punto a punto.
Sobre el chasis va instalado el mecanismo de limpieza, adaptado a un procedimiento específico de limpieza. La limpieza se realiza a vapor, por lo que dicho mecanismo posee un generador, un calderín de agua, válvulas de vapor y agua y un pequeño depósito para el uso opcional de detergente. Por medio de este sistema, se permite el llenado automático del depósito mediante una bomba impulsora y según los niveles prefijados y controlados electrónicamente.
Asimismo sobre el chasis va montado el cuadro eléctrico de control basado en PC el sistema de alimentación, el generador de vapor y los diversos elementos de limpieza.
El equipo incluye 2 cámaras de visión que permiten evaluar el entorno de trabajo y, apoyar el tiempo real al operario de control, además incluye una baliza señalizadora con luz estroboscópica y un sistema de iluminación.
La alimentación de energía del robot trepador deslizante se realiza mediante un cable umbilical que además constituye una vía para el retorno de líquidos.
Una eslinga altamente resistente y autobloqueante "abraza" la torre desde la parte izquierda y derecha del robot trepador deslizante como sistema de seguridad, evitando tanto el deslice vertical del robot trepador deslizante, como su caída al vacío.
El chasis del robot trepador deslizante alberga tanto las ruedas motrices para poder desplazarse, como el equipo de limpieza a vapor, con aspiración automática incorporada, que nos garantiza la perfecta limpieza de todo tipo de superficies adaptadas a robot trepador deslizante.
El diseño del chasis favorece por medio de la cabeza limpiadora y succión, el almacenamiento de la suciedad en un habitáculo a ese efecto, que se sitúa en el sistema "cabeza limpiadora". El vapor producido sale aproximadamente a 180º, con un gasto de agua de 5 litros a la hora, arrancando toda la suciedad y permitiendo al sistema incorporado de succión arrastrar el resto de agua y suciedad hacia el habitáculo a ese efecto.
Breve descripción de los dibujos
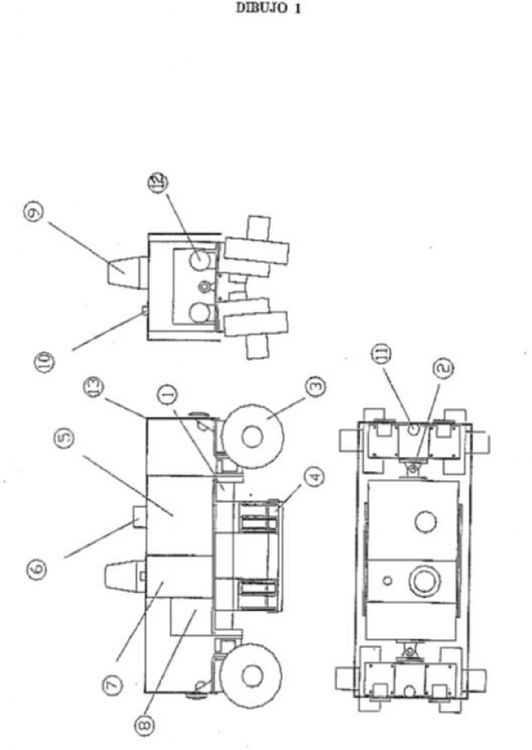
Para completar la descripción del robot trepador deslizante y para ayudar a una mejor comprensión de la invención descrita, se incluye un conjunto de planos en dónde se ilustran, pero no se limitan, las distintas partes que componen el robot trepador deslizante.
Dibujo 1: Muestra el diseño...
Reivindicaciones:
1. Robot trepador limpiador para trabajos de limpieza, caracterizado por un sistema de desplazamiento compuesto por cuatro ruedas motrices capaces de desplazar el robot trepador deslizante y todo el conjunto a lo largo de abscisas y coordenadas por medio del agarre sin rozamiento del sistema magnético dinámico (4).
2. Robot trepador limpiador para trabajos de limpieza según reivindicación 1, caracterizado por un equipo de limpieza que se compone de una cabeza limpiadora (5), un mecanismo de succión (6), un generador de vapor, válvulas y reguladores, un calderín de agua, y un depósito de detergente, y adaptado a un proceso específico de limpieza que requiere el suministro de vapor a aproximadamente a 180º.
Patentes similares o relacionadas:
Sistema robótico y métodos para tareas de mantenimiento en farolas y estructuras verticales de forma cónica, del 11 de Mayo de 2020, de FCC INDUSTRIAL E INFRAESTRUCTURAS ENERGETICAS, S.A.U: Un sistema robótico destinado a realizar de manera autónoma las tareas de mantenimiento de farolas o estructuras verticales con forma cónica o similar, como por ejemplo el pintado […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza, del 20 de Febrero de 2019, de Fleet Cleaner Holding B.V: Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador: - un bastidor que comprende un eje […]
Robot escalador para mástiles, del 7 de Marzo de 2018, de Fachhochschule Aachen: Robot escalador para mástiles/torres , en particular para aerogeneradores, que comprende al menos un primer dispositivo de soporte y al […]
Dispositivo para salvar un obstáculo durante el desplazamiento, del 1 de Febrero de 2017, de VORWERK & CO. INTERHOLDING GMBH: Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el […]
Máquina-útil que comprende un carril longitudinal y un brazo transversal, del 24 de Agosto de 2016, de AIRBUS OPERATIONS: Máquina-útil para la realización de operaciones sobre una pieza que comprende: * un carril longitudinal configurado para ser posicionado frente a la pieza, […]
Robot magnético móvil con hueco de aire, del 18 de Febrero de 2015, de Chariot Robotics, LLC: Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis […]
Instalación para el montaje de piezas de carrocería, del 16 de Octubre de 2013, de ThyssenKrupp System Engineering GmbH: Instalación para el montaje de una carrocería de vehículo, que comprende: - una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a […]