Sistema y procedimiento de inspección del casco de una embarcación.
Sistema de inspección (2) del casco (52) de una embarcación (50),
del tipo que comprende unamáquina móvil (4) equipada con un medio de desplazamiento que permite que se desplace sobre la superficie delcasco de la embarcación, comprendiendo además el sistema un medio de posicionamiento que permite determinar
una posición instantánea de la máquina con respecto a un sistema de coordenadas de referencia (Xref, Yref, Zref),caracterizado porque el medio de posicionamiento comprende:
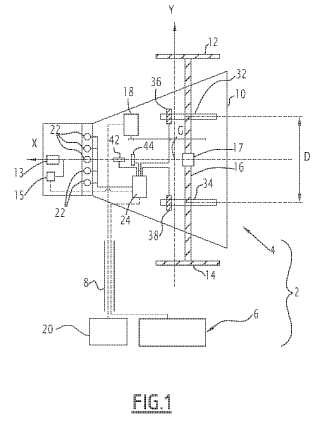
- una primera y una segunda ruedas de codificación (32, 34) montadas en la máquina, coaxiales y separadas entresí por una distancia entre centros (D) a lo largo de un eje transversal (4) perpendicular a una eje longitudinal (X) dedesplazamiento de la máquina, en contacto con el casco de la embarcación, y que son capaces de medir un primer yun segundo desplazamientos lineales instantáneos de la máquina j
- un primer y un segundo inclinómetros (42, 44) montados en la máquina, dispuestos de manera que midanrespectivamente las inclinaciones instantáneas, con respecto a una dirección de referencia, de un primer eje y de unsegundo eje de un sistema de coordenadas vinculado a la máquina, siendo el primer y el segundo ejes ortogonalesa una dirección normal a la superficie del casco de la embarcación y definiendo un plano característico, siendo elprimer eje paralelo a una dirección longitudinal (X) de la máquina (4) y el segundo eje paralelo a una direccióntransversal (Y) de la máquina (4); y,
- un medio de procesamiento (24), que recibe como entrada en el primer y el segundo desplazamientos linealesinstantáneos y la primera y la segunda inclinaciones instantáneas, que es capaz de calcular una variacióninstantánea de la posición de la máquina en el sistema de coordenadas de referencia, y que es capaz de integrar lassucesivas variaciones instantáneas de la posición, a partir de una posición inicial conocida (P0), con el objetivo dedeterminar una posición instantánea de la máquina en el sistema de coordenadas de referencia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2009/051230.
Solicitante: DCNS.
Nacionalidad solicitante: Francia.
Dirección: 2 RUE SEXTIUS-MICHEL 75015 PARIS FRANCIA.
Inventor/es: MYX,Olivier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D57/024 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
- B63B9/00
- G01N29/265 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 29/00 Investigación o análisis de materiales por el empleo de ondas ultrasonoras, sonoras o infrasonoras; Visualización del interior de objetos por transmisión de ondas ultrasonoras o sonoras a través del objeto (G01N 3/00 - G01N 27/00 tienen prioridad). › mediante el movimiento relativo del sensor respecto a un material estacionario.
PDF original: ES-2387252_T3.pdf
Fragmento de la descripción:
Sistema y procedimiento de inspección del casco de una embarcación
La invención se refiere a un sistema de inspección del casco de una embarcación del tipo que comprende una máquina móvil que es capaz de desplazarse sobre la superficie del casco de la embarcación. Más particularmente, la invención se refiere a un medio de posicionamiento que permite obtener una posición instantánea de la máquina con respecto a un sistema de coordenadas de referencia.
Se conocen sistemas de inspección que comprenden una máquina robotizada controlada a distancia que es capaz de desplazarse sobre el casco de una embarcación. Para este fin, la máquina móvil está provista de un medio de desplazamiento que comprende un medio de adherencia que permite que la máquina permanezca en contacto con el casco, y un medio de arrastre que permite desplazar la máquina sobre la superficie del casco de la embarcación. De igual forma, la máquina está provista de diversos tipos de sensores con el fin de llevar a cabo mediciones locales de los valores físicos característicos del casco. La máquina comprende igualmente un medio de posicionamiento que permite obtener una posición instantánea de la máquina con respecto a un sistema de coordenadas de referencia, preferentemente vinculado al casco de la embarcación. La asociación de una medición de un valor físico y la posición de la máquina en el momento en el que se lleva a cabo esta medición permite obtener un mapa del casco generado al desplazar la máquina a lo largo de una trayectoria adecuada.
Hasta el momento actual, tal y como se describe, por ejemplo, en el documento FR 2 861 457, el medio de posicionamiento es un medio de posicionamiento bajo el agua o un medio de posicionamiento en el aire. En consecuencia, el sistema de inspección se utiliza en la porción sumergida del casco de una embarcación, es decir, por debajo de la línea de flotación de la embarcación, o en la parte no sumergida, es decir, por encima de la línea de flotación.
Un medio conocido de posicionamiento bajo el agua, por ejemplo en el documento US 5-945-051, comprende un transmisor acústico, que está dispuesto en la máquina móvil, y dos receptores acústicos, sumergidos y fijados respectivamente a dos boyas que flotan sobre la superficie del agua. Las boyas, que están separadas entre sí, están posicionadas de manera absoluta por un sistema de tipo GPS. El transmisor genera una señal acústica periódica, y la correlación en el tiempo de las señales recibidas, al nivel de las boyas, por cada uno de los receptores permite determinar, por triangulación, la posición de la máquina en relación con las boyas. Tal medio de posicionamiento bajo el agua ofrece una precisión máxima del orden de 50 cm.
El uso de este tipo de medio de posicionamiento bajo el agua requiere un espacio libre en el costado de la embarcación con el fin de disponer las boyas a distancia del casco para lograr la máxima precisión. Esto impide la utilización del sistema de inspección en el costado del caso dirigido hacia el muelle. En consecuencia, es necesario desplazar la embarcación, de modo que realice medio giro, con el fin de liberar el costado del casco que se encuentra inicialmente próximo al muelle siempre que se desee llevar a cabo una inspección.
Un medio conocido de posicionamiento en el aire utiliza un sistema del tipo DGPS, entre balizas colocadas en el suelo y una antena colocada en la máquina móvil. La precisión máxima de este tipo de medio de posicionamiento en el aire es del orden de 50 cm.
Otro medio conocido de posicionamiento en el aire consiste en un dispositivo óptico que comprende una estación de referencia que se fija al suelo y un transmisor óptico que está fijado al robot. La estación de referencia apunta automáticamente al transmisor y transmite la posición tridimensional del mismo con una precisión de centímetros.
Los dos primeros medios de posicionamiento citados previamente no ofrecen la precisión necesaria para llevar a cabo una inspección del casco de una embarcación de una manera eficaz. En efecto, se debe evitar que, como consecuencia de la falta de precisión de las mediciones de la posición de la máquina, un mismo defecto del caso sea cartografiado varias veces como si tuviese diferentes posiciones. De lo contrario, ello daría lugar a la sobreestimación de la gravedad de este defecto y la ejecución de significativas operaciones de mantenimiento del casco, que podrían requerir la inmovilización de la embarcación. A la inversa, se debe evitar la subestimación de un defecto importante como consecuencia de la falta de precisión del medio de posicionamiento. De este modo, la precisión deseable con respecto al posicionamiento de dicho sistema de inspección es del orden de 10 cm.
Además, es deseable ser capaz de inspeccionar el casco de la embarcación sobre la totalidad de su superficie, es decir, tanto por debajo como por encima de la línea de flotación, por medio de una sola máquina. Para este fin, es necesario disponer de un sistema de posicionamiento que funcione tanto en el aire como en el agua. También es deseable que un sistema de posicionamiento de este tipo permita posicionar la máquina con la misma precisión tanto por debajo como por encima de la línea de flotación.
Con el fin de llevar a cabo mediciones instantáneas de la posición de la máquina, tanto en el aire como en el agua, y con la misma precisión, una posible solución consiste en dotar a la máquina de una unidad inercial. La integración de los movimientos de la máquina durante su desplazamiento a partir de un punto de referencia permite determinar la posición instantánea de la máquina. Sin embargo, para lograr la precisión deseada, el coste de una unidad inercial adecuada es alto. Además, los significativos volumen y masa de una unidad inercial son incompatibles con el correcto funcionamiento de la máquina, que debe ser ligera y compacta con el fin de adherirse y desplazarse sobre el casco de la embarcación.
Por consiguiente, el objetivo de la invención es dar a conocer un sistema de inspección del casco de una embarcación que está provisto de un medio de posicionamiento de la máquina móvil que permite realizar mediciones de posición tanto por encima como por debajo de la línea de flotación de la embarcación con una precisión uniforme y elevada, con un coste de operación reducido.
Para este fin, la invención se refiere a un sistema de inspección del casco de una embarcación, del tipo que comprende una máquina móvil equipada con un medio de desplazamiento que permite que se desplace sobre la superficie del casco de la embarcación, comprendiendo además el sistema un medio de posicionamiento que permite determinar una posición instantánea de la máquina con respecto a un sistema de coordenadas de referencia. El medio de posicionamiento comprende:
- una primera y una segunda ruedas de codificación montadas en la máquina, coaxiales y separadas entre sí por una distancia entre centros a lo largo de un eje transversal perpendicular a una eje longitudinal de desplazamiento de la máquina, en contacto con el casco de la embarcación, y que son capaces de medir un primer y un segundo desplazamientos lineales instantáneos de la máquina;
- un primer y un segundo inclinómetros montados en la máquina, dispuestos de manera que midan respectivamente las inclinaciones instantáneas, con respecto a una dirección de referencia, de un primer eje y de un segundo eje de un sistema de coordenadas vinculado a la máquina; y,
- un medio de procesamiento, que recibe como entrada en el primer y el segundo desplazamientos lineales instantáneos y la primera y la segunda inclinaciones instantáneas, que es capaz de calcular una variación instantánea de la posición de la máquina en el sistema de coordenadas de referencia, y que es capaz de integrar las sucesivas variaciones instantáneas de la posición, a partir de una posición inicial conocida, con el objetivo de determinar una posición instantánea de la máquina en el sistema de coordenadas de referencia.
De acuerdo con las realizaciones específicas de la invención, el sistema de inspección comprende una o más de las siguientes características, tomadas de forma aislada o de acuerdo con cualquier combinación técnicamente posible:
- el sistema de inspección comprende al menos un sensor para medir un valor local de un parámetro característico del casco de la embarcación.
-
Reivindicaciones:
1. Sistema de inspección (2) del casco (52) de una embarcación (50) , del tipo que comprende una máquina móvil (4) equipada con un medio de desplazamiento que permite que se desplace sobre la superficie del casco de la embarcación, comprendiendo además el sistema un medio de posicionamiento que permite determinar una posición instantánea de la máquina con respecto a un sistema de coordenadas de referencia (Xref, Yref, Zref) , caracterizado porque el medio de posicionamiento comprende:
- una primera y una segunda ruedas de codificación (32, 34) montadas en la máquina, coaxiales y separadas entre sí por una distancia entre centros (D) a lo largo de un eje transversal (4) perpendicular a una eje longitudinal (X) de desplazamiento de la máquina, en contacto con el casco de la embarcación, y que son capaces de medir un primer y un segundo desplazamientos lineales instantáneos de la máquina j
- un primer y un segundo inclinómetros (42, 44) montados en la máquina, dispuestos de manera que midan respectivamente las inclinaciones instantáneas, con respecto a una dirección de referencia, de un primer eje y de un segundo eje de un sistema de coordenadas vinculado a la máquina, siendo el primer y el segundo ejes ortogonales a una dirección normal a la superficie del casco de la embarcación y definiendo un plano característico, siendo el primer eje paralelo a una dirección longitudinal (X) de la máquina (4) y el segundo eje paralelo a una dirección transversal (Y) de la máquina (4) ; y,
- un medio de procesamiento (24) , que recibe como entrada en el primer y el segundo desplazamientos lineales instantáneos y la primera y la segunda inclinaciones instantáneas, que es capaz de calcular una variación instantánea de la posición de la máquina en el sistema de coordenadas de referencia, y que es capaz de integrar las sucesivas variaciones instantáneas de la posición, a partir de una posición inicial conocida (P0) , con el objetivo de determinar una posición instantánea de la máquina en el sistema de coordenadas de referencia.
2. Sistema de inspección, según la reivindicación 1, caracterizado porque comprende al menos un sensor (22) para medir un valor local de un parámetro característico del casco de la embarcación.
3. Sistema de inspección según una cualquiera de las reivindicaciones precedentes, caracterizado porque dicha dirección de referencia de los inclinómetros (42, 44) es una vertical geográfica.
4. Sistema de inspección según una cualquiera de las reivindicaciones precedentes, caracterizado porque el sistema de inspección (2) comprende una estación de control (6) a distancia, en comunicación con la máquina.
5. Sistema de inspección según una cualquiera de las reivindicaciones 1 a 4, caracterizado porque el medio de procesamiento (24) se encuentra a bordo de la máquina (4) .
6. Sistema de inspección, según la reivindicación 4, caracterizado porque la estación de control a distancia (6) comprende dicho medio de procesamiento.
7. Sistema de inspección según una cualquiera de las reivindicaciones 1 a 6, caracterizado porque es capaz de tener en cuenta las mediciones de la orientación instantánea de la embarcación con respecto al sistema de coordenadas de referencia con el objetivo de determinar una posición instantánea de la máquina en un sistema de coordenadas vinculado al casco de la embarcación (X0, Y0, Z0) .
Patentes similares o relacionadas:
Sistema robótico y métodos para tareas de mantenimiento en farolas y estructuras verticales de forma cónica, del 11 de Mayo de 2020, de FCC INDUSTRIAL E INFRAESTRUCTURAS ENERGETICAS, S.A.U: Un sistema robótico destinado a realizar de manera autónoma las tareas de mantenimiento de farolas o estructuras verticales con forma cónica o similar, como por ejemplo el pintado […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza, del 20 de Febrero de 2019, de Fleet Cleaner Holding B.V: Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador: - un bastidor que comprende un eje […]
Robot escalador para mástiles, del 7 de Marzo de 2018, de Fachhochschule Aachen: Robot escalador para mástiles/torres , en particular para aerogeneradores, que comprende al menos un primer dispositivo de soporte y al […]
Dispositivo para salvar un obstáculo durante el desplazamiento, del 1 de Febrero de 2017, de VORWERK & CO. INTERHOLDING GMBH: Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el […]
Máquina-útil que comprende un carril longitudinal y un brazo transversal, del 24 de Agosto de 2016, de AIRBUS OPERATIONS: Máquina-útil para la realización de operaciones sobre una pieza que comprende: * un carril longitudinal configurado para ser posicionado frente a la pieza, […]
Robot magnético móvil con hueco de aire, del 18 de Febrero de 2015, de Chariot Robotics, LLC: Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis […]
Instalación para el montaje de piezas de carrocería, del 16 de Octubre de 2013, de ThyssenKrupp System Engineering GmbH: Instalación para el montaje de una carrocería de vehículo, que comprende: - una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a […]