Herramienta quirúrgica eléctrica y conjunto de accionamiento para la misma.
Conjunto de accionamiento (14) para el control del funcionamiento de una herramienta quirúrgica eléctrica (10)en función de la fuerza de accionamiento,
que comprende
- un sensor de fuerza (60) configurado para la detección de la fuerza de accionamiento;
- un componente de soporte (54) para el sensor de fuerza (60), que está montado aguas arriba del sensor defuerza (60) en un sentido de aplicación de la fuerza y está acoplado con el mismo de modo que puede transmitirfuerza; caracterizado porque presenta
- un elemento de amortiguación mecánico (48A), que está montado aguas arriba del componente de soporte (54)en el sentido de aplicación de la fuerza.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09001517.
Solicitante: STRYKER LEIBINGER GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: BÖTZINGER STRASSE 41 79111 FREIBURG ALEMANIA.
Inventor/es: IPPISCH,ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B17/16 A61B […] › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Osteotomos; Taladros o cizallas para huesos; Trépanos.
- A61C1/00 A61 […] › A61C TECNICA DENTAL; APARATOS O METODOS PARA HIGIENE ORAL O DENTAL (cepillos dentales no accionados mecánicamente A46B; preparaciones para la técnica dental A61K 6/00; preparaciones para la limpieza de los dientes o enjuagado de la boca A61K 8/00, A61Q 11/00). › Máquinas dentales para taladrar o cortar.
- A61C17/00 A61C […] › Dispositivos para limpiar, pulir, enjuagar o secar los dientes, las cavidades dentales o las prótesis (instrumentos que actúan a la manera de un decapante por chorro de arena A61C 3/025; discos para fresar o pulir los dientes, sus soportes A61C 3/06; dispositivos para la limpieza del espacio interdental A61C 15/00 ); Aparatos para eliminar la saliva; Escupideras de uso dental.
- H01H9/04 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 9/00 Detalles de los dispositivos de conmutación no cubiertos por H01H 1/00 - H01H 7/00. › Envolturas estancas al polvo, a las salpicaduras, a la lluvia, al agua o antideflagrantes.
PDF original: ES-2398006_T3.pdf
Fragmento de la descripción:
Herramienta quirúrgica eléctrica y conjunto de accionamiento para la misma.
Campo técnico
La presente invención se refiere en general a herramientas quirúrgicas eléctricas tales como brocas, sierras para cortar huesos y destornilladores que se hacen funcionar mediante un motor eléctrico. Más concretamente, la invención se refiere a una herramienta quirúrgica eléctrica, que comprende un conjunto de accionamiento con un sensor de fuerza.
Antecedentes de la técnica Ya desde hace varias décadas los cirujanos utilizan en sus actividades las herramientas eléctricas más diversas. Las herramientas quirúrgicas eléctricas convencionales comprenden a este respecto, con frecuencia, conjuntos de accionamiento mecánicos con conmutadores deslizantes, conmutadores oscilantes o botones giratorios para el control de determinadas funcionalidades de la herramienta. Sin embargo, los conjuntos de accionamiento mecánicos son en ocasiones desventajosos para herramientas quirúrgicas eléctricas, al menos en el sentido de que tienen que esterilizarse. Esto va relacionado con el hecho de que las piezas móviles de dichos conjuntos se sellan con dificultad frente a la entrada de medios de esterilización líquidos o gaseosos.
La penetración de un medio de esterilización en conjuntos de accionamiento mecánicos es perjudicial para su capacidad de funcionamiento. Por ello, las herramientas quirúrgicas eléctricas con conmutadores oscilantes, botones giratorios o piezas móviles similares, o bien ni siquiera pueden esterilizarse o bien tienen que someterse a un mantenimiento tras pocos ciclos de esterilización.
Para mejorar o siquiera posibilitar la esterilización de herramientas quirúrgicas eléctricas, los conjuntos de accionamiento pueden equiparse con un sensor de fuerza. Los sensores de fuerza presentan una forma constructiva plana y no presentan elementos mecánicos móviles. Por estos motivos, los sensores de fuerza pueden integrarse de manera sencilla y estanca por debajo de un tramo de carcasa flexible de una herramienta quirúrgica eléctrica.
Las herramientas quirúrgicas eléctricas con sensores de fuerza dispuestos por debajo de tramos de carcasa flexibles se conocen, por ejemplo, por la patente US nº 3.463.990 o la patente US nº 6.037.724. En el caso de las herramientas eléctricas descritas en estos documentos el respectivo sensor de fuerza está alojado dentro de un revestimiento de plástico, que protege el sensor de fuerza frente a los medios de esterilización.
Por el documento EP 1 754 447 A2 se conoce además una herramienta quirúrgica eléctrica con un sensor de fuerza dispuesto en una cápsula metálica, según el preámbulo de la reivindicación 1. El encapsulado protege el sensor de manera fiable frente a los medios de esterilización. Para garantizar la capacidad de funcionamiento del sensor de fuerza encapsulado se propone un calibrado continuo.
Por ejemplo en los documentos DE 10 2004 041 871 A1 y US nº 5.098.430 se describen elementos de mando adicionales para herramientas quirúrgicas. A este respecto en cada caso los pulsadores están protegidos por plásticos elásticos frente a los medios de esterilización.
La invención se basa en el objetivo de aumentar la capacidad de funcionamiento de las herramientas quirúrgicas eléctricas conocidas con sensores de fuerza.
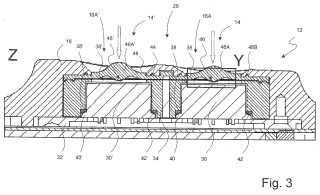
Breve resumen Según un primer aspecto, se propone un conjunto de accionamiento para el control del funcionamiento de una herramienta quirúrgica eléctrica en función de la fuerza de accionamiento, comprendiendo el conjunto de accionamiento un sensor de fuerza configurado para la detección de la fuerza de accionamiento, un componente de soporte para el sensor de fuerza, que está montado aguas arriba del sensor de fuerza en un sentido de aplicación de la fuerza y está acoplado con el mismo de modo que puede transmitir fuerza y un elemento de amortiguación mecánica, que está montado aguas arriba del componente de soporte en el sentido de aplicación de la fuerza.
El elemento de amortiguación mecánico contrarresta un daño del conjunto de accionamiento por golpes o impactos en el entorno quirúrgico. Con este fin, el elemento de amortiguación pueden presentar propiedades elásticas o de resorte.
En lo que respecta a la estructura del sensor de fuerza, puede elegirse entre diferentes formas de realización. Así es concebible configurar el sensor de fuerza como medidor de tensiones, como elemento piezoeléctrico, como elemento semiconductor, etc. Para el sensor de fuerza puede estar previsto un circuito de acondicionamiento de señales acoplado eléctricamente con el sensor de fuerza. Según una primera variante el circuito de acondicionamiento de señales toma una señal de sensor y la convierte en una señal de salida continua, en función de la fuerza de accionamiento. Según una segunda variante el circuito de acondicionamiento de señales convierte la señal de sensor en una señal de salida discreta, es decir, por ejemplo binaria (encendido/apagado) o de múltiples fases.
El sensor de fuerza puede estar completa o parcialmente encapsulado. La cápsula de sensor puede estar prevista para la disposición en, sobre o por debajo de la carcasa de la herramienta quirúrgica eléctrica. La cápsula puede estar compuesta completa o parcialmente por un material resistente frente a los medios de esterilización (o estar recubierta con un material de este tipo) . Así, la cápsula puede estar realizada completa o parcialmente a partir de un metal. La cápsula puede presentar un revestimiento de plástico o un núcleo de un material no metálico, revestido con un recubrimiento metálico. En el caso del componente de soporte puede tratarse de una parte que aloja el sensor de fuerza.
Según una variante el conjunto de accionamiento comprende además una cubierta preferentemente flexible, que está dispuesta sobre el componente de soporte. El elemento de amortiguación puede en este caso o bien estar integrado en la cubierta o bien estar dispuesto entre la cubierta y el componente de soporte. También es concebible combinar estas dos variantes, disponiendo dos o más elementos de amortiguación en la dirección de transmisión de fuerza uno detrás de otro.
La cubierta puede presentar una forma sustancialmente plana y extenderse de manera sustancialmente perpendicular al sentido de aplicación de la fuerza. Adicional o alternativamente a esto la cubierta también puede discurrir sustancialmente en paralelo al componente de soporte.
El elemento de amortiguación puede presentar un aumento de grosor por zonas, en particular convexo o estar formado por un aumento de grosor por zonas, en particular convexo de la cubierta. El aumento de grosor por zonas permite definir una zona de aplicación, que puede detectarse bien de manera háptica por el cirujano, para la fuerza de accionamiento. Así, el cirujano puede sentir la zona de aplicación, sin tener que desviar la mirada necesariamente al conjunto de accionamiento o la herramienta quirúrgica eléctrica.
Según una configuración el elemento de amortiguación presenta un grosor mínimo de aproximadamente 1, 5 mm y en particular de aproximadamente desde 2 hasta 2, 5 mm. Mientras que a medida que aumenta el grosor aumentan las propiedades de amortiguación, simultáneamente pueden verse afectadas las propiedades de transmisión de fuerza. A pesar de las propiedades de amortiguación el elemento de amortiguación puede estar configurado con la suficiente rigidez como para poder funcionar como unidad de transmisión de fuerza en una disposición en el trayecto de transmisión de fuerza entre una zona de aplicación de fuerza y el sensor de fuerza. Según la configuración del elemento de amortiguación y la elección del material el grosor del elemento de amortiguación puede moverse en un intervalo comprendido entre aproximadamente 1, 5 mm y 5 mm, en particular entre 2 mm y 4 mm.
Tanto el elemento de amortiguación como la cubierta opcional pueden estar compuestos por un material impermeable frente a los medios de esterilización. En este caso, pueden utilizarse materiales poliméricos elásticos tales como silicona u otros plásticos.
El conjunto de accionamiento puede estar configurado como subconjunto de la herramienta eléctrica que puede manipularse de manera independiente. En este caso, el conjunto de accionamiento puede incorporarse en su totalidad (al menos con sus piezas más determinantes) en una carcasa de la herramienta eléctrica, lo que simplifica el montaje.
El conjunto de accionamiento puede comprender además una placa de soporte para el alojamiento de la cápsula de sensor. La placa de soporte puede estar configurada para cerrar una abertura configurada en una carcasa de la herramienta eléctrica... [Seguir leyendo]
Reivindicaciones:
1. Conjunto de accionamiento (14) para el control del funcionamiento de una herramienta quirúrgica eléctrica (10)
en función de la fuerza de accionamiento, que comprende 5
-un sensor de fuerza (60) configurado para la detección de la fuerza de accionamiento;
-un componente de soporte (54) para el sensor de fuerza (60) , que está montado aguas arriba del sensor de
fuerza (60) en un sentido de aplicación de la fuerza y está acoplado con el mismo de modo que puede transmitir 10 fuerza; caracterizado porque presenta
-un elemento de amortiguación mecánico (48A) , que está montado aguas arriba del componente de soporte (54) en el sentido de aplicación de la fuerza.
2. Conjunto de accionamiento según la reivindicación 1, que comprende además una cubierta (48) , que está dispuesta sobre el componente de soporte (54) , estando el elemento de amortiguación (48A) integrado en la cubierta (48) o dispuesto entre la cubierta (48) y el componente de soporte (54) .
3. Conjunto de accionamiento según la reivindicación 2, caracterizado porque la cubierta (48) se extiende sustancialmente de manera perpendicular al sentido de aplicación de la fuerza y/o sustancialmente en paralelo al componente de soporte (54) .
4. Conjunto de accionamiento según una de las reivindicaciones anteriores, caracterizado porque el elemento de amortiguación (48A) presenta un aumento de grosor por zonas. 25
5. Conjunto de accionamiento según la reivindicación 4, caracterizado porque el aumento de grosor por zonas define una zona de aplicación, que puede detectarse de manera háptica, para la fuerza de accionamiento.
6. Conjunto de accionamiento según una de las reivindicaciones anteriores, caracterizado porque el elemento de 30 amortiguación (48A) presenta un grosor mínimo de aproximadamente 1, 5 mm.
7. Conjunto de accionamiento según una de las reivindicaciones anteriores, caracterizado porque el elemento de amortiguación (48A) y/o la cubierta (48) opcional es impermeable a los medios de esterilización.
8. Conjunto de accionamiento según una de las reivindicaciones anteriores, caracterizado porque el elemento de amortiguación (48A) y/o la cubierta (48) opcional contiene un material polimérico elástico.
9. Conjunto de accionamiento según una de las reivindicaciones anteriores, caracterizado porque el componente de soporte (54) está formado por un tramo de una cápsula de sensor (30) , que rodea al menos por zonas el sensor de 40 fuerza (60) .
10. Conjunto de accionamiento según una de las reivindicaciones anteriores, caracterizado porque el conjunto de accionamiento (14) forma un subconjunto de la herramienta eléctrica (10) que puede manipularse de manera independiente.
11. Herramienta quirúrgica eléctrica (10) , que comprende
-una carcasa (12) ; y
-un conjunto de accionamiento (14) dispuesto en la zona de la carcasa (12) según una de las reivindicaciones 1 a 10.
12. Herramienta quirúrgica eléctrica según la reivindicación 11 combinada con al menos la reivindicación 2, caracterizada porque la carcasa presenta una abertura (16A) para la aplicación de fuerza en el sentido del sensor de 55 fuerza (60) , cerrando la cubierta (48) la abertura (16A) de manera estanca frente a la entrada de medios de esterilización.
13. Herramienta quirúrgica eléctrica según la reivindicación 12, caracterizada porque la cubierta (48) presenta un primer perfilado de superficie, que rodea la abertura (16A) de la carcasa (12) , que coopera sustancialmente en 60 arrastre de forma con un segundo perfilado de superficie de la carcasa (12) .
14. Herramienta quirúrgica eléctrica según la reivindicación 12 ó 13, caracterizada porque la cubierta (48) está dispuesta de forma estanca entre una primera superficie de la carcasa (12) , orientada hacia el interior de la carcasa, y una segunda superficie del conjunto de accionamiento (14) , opuesta a la primera superficie.
15. Herramienta quirúrgica eléctrica según la reivindicación 14, caracterizada porque la primera superficie está configurada en un saliente (16) de la carcasa (12) y/o la segunda superficie está configurada sobre un elemento de apoyo (34) para el componente de soporte (54) .
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]