Dispositivo de exoesqueleto de medición y terapia para el tobillo, reconfigurable.
1. Dispositivo de exoesqueleto de medición y terapia para el tobillo,
sin fijación a una base, que se puede llevar y reconfigurable, caracterizado porque comprende:
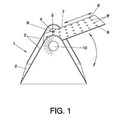
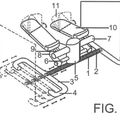
una plataforma de base orientada hacia la pierna del usuario,
una plataforma móvil orientada hacia el pie del usuario,
un elemento de conexión que conecta la plataforma de base y la plataforma móvil,
un elemento de articulación que conecta el elemento de conexión a la plataforma de base.
2. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 1, caracterizado porque el elemento de articulación es una articulación reconfigurable, que comprende dos ejes de articulación donde un primer eje es tangencial a la placa de base mientras que el segundo eje es perpendicular a la placa de base, en el que en posición desbloqueada la articulación reconfigurable puede rotar libremente alrededor de los dos ejes.
3. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base, según la reivindicación 2, caracterizado porque comprende una serie de articulaciones de revolución que funcionan como articulación universal rotando sobre dichos ejes deseados, cuando la articulación reconfigurable está desbloqueada.
4. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base, según la reivindicación 2, caracterizado porque comprende unos medios de bloqueo aptos para bloquear el segundo eje de rotación, de manera que cuando el segundo eje de articulación está bloqueado, la articulación reconfigurable se limita a funcionar como articulación de revolución, que puede rotar sólo alrededor del primer eje.
5. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque el elemento de conexión comprende una unidad de accionamiento y un elemento móvil.
6. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además una unidad de control y al menos dos sensores.
7. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque el dispositivo puede proporcionar modos de ejercicio pasivo, activo, asistido y resistivo.
8. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 7, caracterizado porque dispone de medios aptos para implementar túneles virtuales y campos de fuerzas en el interior de estos túneles en el dispositivo para permitir la práctica segura con los modos asistido o resistivo.
9. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 8, dispone de medios para combinarse con juegos de realidad virtual.
10. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además un controlador de posición robusto con observadores de par de torsión.
11. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque el elemento de conexión comprende una unidad (6) de accionamiento y un elemento móvil, donde la unidad de accionamiento es apta para mover el elemento móvil.
12. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 11, caracterizado porque la unidad de accionamiento es un motor eléctrico y el elemento móvil es al menos un eslabón extensible.
13. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende una articulación esférica que une el elemento de conexión con la plataforma móvil.
14. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque la articulación universal y las articulaciones esféricas están separadas 120º a lo largo de la circunferencia de la plataforma de base y la plataforma móvil, respectivamente.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201330590.
Solicitante: SABANCI UNIVERSITESI.
Nacionalidad solicitante: Turquía.
Dirección: Orhanli Tuzla 34956 Istanbul TURQUIA.
Inventor/es: PATOGLU,Volkan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63B23/08 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 23/00 Aparatos de ejercicio especialmente adaptados a partes determinadas del cuerpo (A63B 22/00 tiene prioridad; aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos de los mismos A63B 24/00; dispositivos para ejercitar o fortificar los dedos o los brazos para la enseñanza de la manipulación de teclados G09B, p. ej. G09B 15/06). › para las articulaciones de los tobillos.
Fragmento de la descripción:
Dispositivo de exoesqueleto de medición y terapia para el tobillo, reconfigurable.
Antecedentes de la invención La presente invención se refiere a un dispositivo de exoesqueleto sin fijación a una base, reconfigurable, basado en mecanismos paralelos, con realimentación de fuerzas, para el tobillo humano. La utilización principal del dispositivo está prevista como máquina de entrenamiento de equilibrio/propiocepción, aunque el dispositivo de exoesqueleto también puede emplearse para adaptarse a ejercicios de rango de movimiento (RoM, range of movement) /fortalecimiento. Este dispositivo también se utiliza para ejercicios de articulaciones metatarsofalángicas.
El objetivo de la rehabilitación es recuperar las capacidades físicas, sensoriales y neuronales del paciente que se vieron afectadas debido a una enfermedad o lesión. La rehabilitación del tobillo es necesaria normalmente después de un esguince de tobillo, una de las lesiones más comunes en deportes y en la vida diaria [1]. También se experimentan pérdidas de capacidad funcional, capacidad para aguantar peso y
estabilidad de articulación en el tobillo después de lesiones neurológicas como consecuencia de un ictus y deformidad por contractura como consecuencia de enfermedades cerebrovasculares. Los ejercicios de fisioterapia son indispensables para recuperar el rango de movimiento (RoM) de la articulación, para ayudar a volver a fortalecer los músculos para aguantar peso, para favorecer un mejor sentido de la posición de articulación (propiocepción) , para garantizar la integridad neuronal y para recuperar el equilibrio dinámico.
La rehabilitación de una lesión de tobillo se aborda generalmente en tres fases de ejercicio secuenciales [2], [3]. Los ejercicios en la fase inicial se centran primero en 30 permitir un RoM completo de la articulación y a continuación fortalecer los músculos del tobillo. Una vez que se logra el RoM y la flexibilidad requeridos y los músculos se vuelven lo suficientemente fuertes para aguantar parte del peso sin producir dolor, puede iniciarse la fase intermedia de la terapia, que se centra en la mejora de la capacidad de propiocepción empleando ejercicios de equilibrio estático. En la fase final de la terapia, se practican ejercicios dinámicos más avanzados.
Los dispositivos de rehabilitación tradicionales utilizados para asistir en la fisioterapia son equipos pasivos simples, tales como bandas elásticas y mecanismos de bombeo para la rehabilitación del tobillo para ejercicios de fortalecimiento y estiramiento; tablas de equilibrio y rodillos de espuma para ejercicios de propiocepción y equilibrio. Los ejercicios 5 de RoM se realizan generalmente de manera manual por un terapeuta. A pesar de que estos tipos de equipos son simples y rentables con coste fijo, estos dispositivos tradicionales carecen de medios para recopilar mediciones cuantitativas del progreso del paciente, monitorizar el historial del paciente para su reevaluación, y lograr protocolos de tratamiento interactivos personalizados. Los terapeutas deben asumir la carga física de la terapia de movimiento y proporcionar al paciente toda su atención mientras se ejercita con estos dispositivos.
Actualmente se realizan ejercicios de rehabilitación mediante la ayuda de los dispositivos robóticos. La asistencia de ejercicios de rehabilitación física repetitivos utilizando dispositivos robóticos no sólo ayuda a eliminar la carga física de la terapia de movimiento para los terapeutas, sino que también disminuye los costes relacionados con la aplicación. Además, la terapia de rehabilitación a través de robot permite mediciones cuantitativas del progreso del paciente y puede utilizarse para realizar protocolos de tratamiento interactivos personalizados.
Los efectos beneficiosos de los protocolos de rehabilitación asistidos por robot se han demostrado durante ensayos clínicos de terapia convencional en la literatura [4]. Reconociendo la necesidad de dispositivos de rehabilitación asistidos por robot para la fisioterapia para el tobillo, se han propuesto diversos diseños hasta la fecha. Girone et al.
propusieron una interfaz de realimentación de fuerzas, denominada tobillo de Rutgers, basada en la plataforma de Stewart [5]. En [6], se implementó un protocolo de entrenamiento interactivo basado en realidad virtual utilizando el tobillo de Rutgers para rehabilitación ortopédica. El sistema se estudió además [7] y [8] a través de diversos estudios de casos. La rehabilitación de tobillo a distancia en casa se abordó en [9],
mientras que en [10] el sistema se extendió a una configuración de plataforma de Stewart doble para su utilización en la rehabilitación y simulación de la marcha.
En [11], Dai et al. propusieron otro dispositivo robótico para tratar lesiones de esguince de tobillo. A diferencia del diseño de la plataforma de Stewart, este dispositivo avanza 35 precisamente los suficientes grados de libertad (gdl) para abarcar el espacio de trabajo de orientación del tobillo humano. El análisis cinetostático presentado en esta referencia resaltó la importancia de emplear un poste central para lograr mayor rigidez para el dispositivo. En [12], Agrawal et al. propusieron una ortesis de pie-tobillo para la rehabilitación asistida por robot y presentaron el análisis cinemático y el control del mecanismo propuesto. De manera similar, en [13] Roy et al. propusieron Anklebot para ayudar en la recuperación de la función del tobillo. Este dispositivo puede utilizarse también para medir la rigidez del tobillo, que es un importante factor biomecánico para la locomoción.
Syrseloudis y Emiris estudiaron el RoM traslacional y rotacional del tobillo y el pie humano a través de experimentos en sujetos humanos, y concluyeron que un mecanismo de trípode paralelo con un eje rotacional adicional en serie es el diseño cinemático más relevante para seguir la cinemática del pie relacionada con el tobillo humano [14]. En [15] Yoon y Ryu propusieron un dispositivo de almohadilla para el pie basado en un mecanismo paralelo de 4 gdl híbrido y presentaron el análisis cinemático del dispositivo novedoso. En [3] y [16], este trabajo se amplió para permitir la reconfiguración del dispositivo para soportar diversos modos de ejercicio distintos.
Es por tanto un objetivo de la invención proporcionar un dispositivo que presente un diseño reconfigurable. Su implementación es simple y el dispositivo puede construirse ensamblando piezas disque se pueden llevar comercialmente. Debido a su capacidad de reconfiguración, el dispositivo permite tanto ejercicios de rango de movimiento de RoM/fortalecimiento como ejercicios de equilibrio/propiocepción.
Sumario de la invención Según una forma de realización de la presente invención, el dispositivo puede abarcar todo el rango complejo del tobillo humano para ejercicios de RoM/fortalecimiento. El dispositivo puede soportar el peso humano durante ejercicios de equilibrio/propiocepción. También se permiten ejercicios de articulaciones metatarsofalángicas por medio del
diseño reconfigurable de la placa de base.
Según una forma de realización de la presente invención, el dispositivo puede utilizarse como herramienta de medición clínica. Los movimientos, fuerzas e impedancias a nivel de la articulación del tobillo pueden determinarse para asistir en los diagnósticos.
Según una forma de realización de la presente invención, el dispositivo es ergonómico, permite todo el rango de movimiento del tobillo humano. El dispositivo es ligero y que se puede llevar; por tanto, es portátil. El dispositivo es intrínsecamente seguro debido a la elección de sus actuadores.
Según una forma de realización de la presente invención, el dispositivo presenta un rendimiento de control mayor que dispositivos similares debido a su estructura cinemática paralela y ancho de banda optimizado.
Según una forma de realización de la presente invención, el dispositivo soporta movimientos complejos del pie y no se limita a un único grado de libertad como es el caso en muchos diseños existentes.
Según una forma de realización de la presente invención, el dispositivo está programado para guiar o asistir al paciente o aplicar una resistencia para el mismo durante la terapia física y está implementado con un sistema informático. Los niveles de asistencia y resistencia son ajustables mediante software. El dispositivo puede programarse también para estimar parámetros de articulación del tobillo, tales como el tono y la impedancia del tobillo.
Los aspectos del dispositivo según la presente invención se refieren a robots de rehabilitación, rehabilitación asistida por robot, dispositivos para terapia física,...
Reivindicaciones:
1. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base, que se puede llevar y reconfigurable, caracterizado porque comprende:
una plataforma de base orientada hacia la pierna del usuario,
una plataforma móvil orientada hacia el pie del usuario,
un elemento de conexión que conecta la plataforma de base y la plataforma móvil,
un elemento de articulación que conecta el elemento de conexión a la plataforma de base.
2. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 1, caracterizado porque el elemento de articulación es una articulación reconfigurable, que comprende dos ejes de articulación donde un primer eje es tangencial a la placa de base mientras que el segundo eje es perpendicular a la placa de base, en el que en posición desbloqueada la articulación reconfigurable puede rotar
libremente alrededor de los dos ejes.
3. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base, según la reivindicación 2, caracterizado porque comprende una serie de articulaciones de revolución que funcionan como articulación universal rotando sobre dichos ejes deseados, cuando la articulación reconfigurable está desbloqueada.
4. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base, según la reivindicación 2, caracterizado porque comprende unos medios de bloqueo aptos para bloquear el segundo eje de rotación, de manera que cuando el
segundo eje de articulación está bloqueado, la articulación reconfigurable se limita a funcionar como articulación de revolución, que puede rotar sólo alrededor del primer eje.
5. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque el 35 elemento de conexión comprende una unidad de accionamiento y un elemento móvil.
6. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además una unidad de control y al menos dos sensores.
7. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque el dispositivo puede proporcionar modos de ejercicio pasivo, activo, asistido y resistivo.
8. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 7, caracterizado porque dispone de medios aptos para implementar túneles virtuales y campos de fuerzas en el interior de estos túneles en el dispositivo para permitir la práctica segura con los modos asistido o resistivo.
9. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 8, dispone de medios para combinarse con juegos de realidad virtual.
10. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además un controlador de posición robusto con observadores de par de torsión.
11. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque el
elemento de conexión comprende una unidad (6) de accionamiento y un elemento móvil, donde la unidad de accionamiento es apta para mover el elemento móvil.
12. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según la reivindicación 11, caracterizado porque la unidad de accionamiento es un 30 motor eléctrico y el elemento móvil es al menos un eslabón extensible.
13. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende una articulación esférica que une el elemento de conexión con la plataforma móvil.
14. Dispositivo de exoesqueleto de medición y terapia para el tobillo, sin fijación a una base según cualquiera de las reivindicaciones anteriores, caracterizado porque la articulación universal y las articulaciones esféricas están separadas 120º a lo largo de la circunferencia de la plataforma de base y la plataforma móvil, respectivamente.
Patentes similares o relacionadas:
APARATO EJERCITADOR DE LAS EXTREMIDADES INFERIORES DEL CUERPO HUMANO, del 4 de Octubre de 2018, de GALVEZ CAMPOS,JOSE LUIS: Aparato ejercitador de las extremidades inferiores del cuerpo humano que, desde un grupo motor y mediante bielas, transmite movimiento de […]
Aparato ejercitador de las extremidades inferiores del cuerpo humano, del 3 de Octubre de 2018, de GALVEZ CAMPOS,JOSE LUIS: Aparato ejercitador de las extremidades inferiores del cuerpo humano que, desde un grupo motor y mediante bielas, transmite movimiento de vaivén a una pareja de soportes […]
Aparato polivalente para terapia física, del 21 de Marzo de 2018, de Advanced Distribution S.p.A: Aparato polivalente para terapia física, que comprende un soporte al cual está fijada una primera herramienta prevista para un primer tratamiento, una segunda […]
MÁQUINA DE MOVIMIENTO ROTATIVO DE TOBILLOS, del 12 de Julio de 2017, de SANJUAN TEJEDOR, Victor: 1. Máquina de movimiento rotativo de tobillos, caracterizada por el hecho de que comprende: - una base de apoyo en el suelo y de inclinación variable, […]
 DISPOSITIVO DE REHABILITACIÓN EN ESPECIAL PARA EL PIE, del 7 de Mayo de 2013, de SERVICIO ANDALUZ DE SALUD: Dispositivo de rehabilitación, en especial para el pie.
Permite obtener una valoración objetiva de la evolución del proceso de rehabilitación de patologías […]
DISPOSITIVO DE REHABILITACIÓN EN ESPECIAL PARA EL PIE, del 7 de Mayo de 2013, de SERVICIO ANDALUZ DE SALUD: Dispositivo de rehabilitación, en especial para el pie.
Permite obtener una valoración objetiva de la evolución del proceso de rehabilitación de patologías […]
 APARATO PARA LA OSCILACION DEL PIE Y PARA ACTIVAR LA CIRCULACION SANGUINEA, del 25 de Febrero de 2010, de SANCHO SERRATS,JUAN ANDRES: Aparato para la oscilación del pie y para activar la circulaciónsanguínea. Comprende una base , una plataforma elevable , nos medios de accionamiento de […]
APARATO PARA LA OSCILACION DEL PIE Y PARA ACTIVAR LA CIRCULACION SANGUINEA, del 25 de Febrero de 2010, de SANCHO SERRATS,JUAN ANDRES: Aparato para la oscilación del pie y para activar la circulaciónsanguínea. Comprende una base , una plataforma elevable , nos medios de accionamiento de […]
DISPOSICION DE GIMNASIA TERAPEUTICA PARA LA PREVENCION DE TROMBOSIS APLICABLE SOBRE VEHICULOS DE PASAJEROS EN GENERAL Y ESPECIALMENTE SOBRE AVIONES., del 1 de Julio de 2004, de CHINIQUE PEA,NORBERTO GUILLAMON VIAMONTE,JOSE MARIA: Disposición de gimnasia terapéutica para la prevención de trombosis aplicable sobre vehículos de pasajeros en general y especialmente sobre aviones, que consiste en […]
 APARATO DE GIMNASIA PARA VEHICULOS DE TRANSPORTE DE PASAJEROS, del 7 de Abril de 2010, de HURTADO MORENO,URSULA
LOPEZ DIAZ,INMACULADA: Aparato de gimnasia para vehículos de transporte de pasajeros, consistente en una barra telescópica con un muelle helicoidal en su interior y cuyos extremos se ramifican […]
APARATO DE GIMNASIA PARA VEHICULOS DE TRANSPORTE DE PASAJEROS, del 7 de Abril de 2010, de HURTADO MORENO,URSULA
LOPEZ DIAZ,INMACULADA: Aparato de gimnasia para vehículos de transporte de pasajeros, consistente en una barra telescópica con un muelle helicoidal en su interior y cuyos extremos se ramifican […]