Dispositivo de manipulación de piezas.
Dispositivo de manipulación de piezas utilizado, en particular,
para la elevación y rotación de hasta 360o de dichaspiezas, comprendiendo el dispositivo por lo menos una torre, la torre principal (1), y una torre satélite (2) conectadamediante un tubo flexible de un dispositivo hidráulico, presentando cada torre una base de soporte (4, 13),caracterizado porque
cada una de las torres, la torre principal (1) y la torre satélite (2), incluye:
- una columna telescópica (5, 14) cuya altura puede ser regulada mediante un dispositivo hidráulico (12) que tieneun recorrido variable, que puede modificarse a voluntad y en función del tamaño de las piezas a manipular, y quetiene un sistema de límite de la carga que impide cualquier movimiento si la pieza a manipular tiene un peso mayorque la fuerza de elevación para la que están diseñadas las torres (1, 2);
- un caballete (6, 15) cuya altura es regulable manualmente proporcionando soporte a la pieza a manipular;
- un brazo de carga fijo (9, 16) acoplado a la parte superior de la columna telescópica (5, 14), en el que estámontada una polea (7, 17) en la que discurre una correa (8, 18) que proporciona soporte a la pieza a manipular y lahace girar.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/PT2010/000031.
Solicitante: Lomboser Metalúrgica, S.A.
Nacionalidad solicitante: Portugal.
Dirección: Zona Industrial de Vagos Lote 93 3840-385 Vagos PORTUGAL.
Inventor/es: SILVA,PEDRO MIGUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para depositar las cargas según una orientación o en una posición dadas.
PDF original: ES-2433232_T3.pdf
Fragmento de la descripción:
Dispositivo de manipulación de piezas CAMPO TÉCNICO DE LA INVENCIÓN
La presente invención se utiliza en el sector de la construcción metálica y está relacionada con un dispositivo de manipulación de piezas, utilizado en particular para levantar y girar hasta 360º piezas de estructura alargada, tales como perfiles con diferentes secciones.
El dispositivo de manipulación de piezas permite la ejecución de trabajos de construcción metálica y mecánica utilizando piezas de perfiles largos, sin la ayuda de grúas-puente, de manera segura y ergonómica para el operario.
TÉCNICA ANTERIOR DE LA INVENCIÓN
Se conocen por la técnica anterior dispositivos de manipulación de piezas, para piezas de estructura alargada. Por ejemplo, debe hacerse referencia a los dispositivos descritos en las solicitudes de patente DE102004031206 y DE19962203.
La solicitud de patente DE102004031206 se refiere a un dispositivo que comprende una cadena y dos brazos de retención que transportan una carga. Hay dispuestos rodillos en los brazos de retención para desviar la cadena, donde la distancia entre los rodillos es regulable entre sí. El dispositivo descrito en esta invención comprende, asimismo, rodillos adicionales dispuestos asimismo para desviar la cadena, estando situados dichos rodillos en extremos opuestos de los brazos de retención. Los brazos de retención están diseñados de manera que giran en un eje de rotación.
La solicitud de patente DE19962203 se refiere a un dispositivo de rotación de carga que tiene una sección de balanceo dotada de una correa, una cadena o un cable que se hace pasar alrededor de, por lo menos, un rodillo y se utiliza para soportar la carga. Dicha sección de balanceo está fijada a un extremo de un brazo de palanca, acoplada a un brazo de soporte en el otro extremo, estando montado dicho brazo de soporte sobre una base para soportar el dispositivo de rotación de carga sobre el suelo. Dicho dispositivo se describe asimismo en el documento DE 3917545.
Los anteriores y otros documentos relacionados de la técnica anterior hacen referencia a dispositivos para la manipulación de piezas de estructura alargada, que no incluyen las características descritas en la presente invención.
CARACTERÍSTICAS DE LA INVENCIÓN
La presente invención se refiere a un dispositivo de manipulación de piezas, en particular para la elevación y rotación de hasta 360º de piezas de estructura alargada.
El dispositivo de manipulación de piezas comprende por lo menos una torre, la torre principal, y una torre secundaria utilizada como torre satélite en relación con la torre principal. La torre principal controla la elevación y rotación de la pieza a manipular en el dispositivo de manipulación de piezas.
El dispositivo de manipulación de piezas se utiliza en el sector de la construcción metálica, por ejemplo en construcción soldada, montaje de moldes y toda clase de manipulación de piezas de estructura alargada, permitiendo la ejecución de trabajos de construcción metálica y mecánica utilizando piezas de largos perfiles, sin la ayuda de grúas-puente.
El dispositivo de manipulación de piezas está caracterizado por la elevación y rotación de hasta 360º de las piezas a manipular, proporcionando de este modo acceso a cualquier sección de las piezas sin forzar al operario a adoptar posiciones incorrectas o inseguras.
Siendo seguro para el operario, el dispositivo de manipulación de piezas permite que las piezas a manipular adopten diversas posiciones, debido al brazo de carga articulado y a un acceso frontal totalmente abierto, que permite una carga y descarga rápida y segura de las piezas a manipular.
Varios componentes son comunes para ambas torres, tal como una columna telescópica ajustable hidráulicamente con una carrera máxima de 800 mm, que puede modificarse a voluntad y en función del tamaño de las piezas a manipular; un caballete ajustable en altura para soportar las piezas, consiguiendo de este modo una posición de trabajo óptima que satisface los muy deseados principios ergonómicos en los lugares de trabajo para la salubridad del trabajo para el trabajador; un brazo de carga fijo en la parte superior de la columna telescópica; y una polea acoplada al brazo giratorio fijo en que discurre una correa que proporciona soporte a la pieza a manipular y la hace girar.
El dispositivo hidráulico mencionado anteriormente comprende un sistema de limitación de la carga que impide cualquier movimiento si la pieza a manipular tiene un peso mayor que la fuerza de elevación para la que está diseñado el dispositivo de manipulación de piezas.
La rotación de las piezas a manipular se ejecuta mediante correas suspendidas de las poleas, que están acopladas a los respectivos brazos fijos de la torre principal y la torre satélite.
La polea situada en la torre principal está conectada a un motor con reductor que permite diferentes velocidades de rotación de las poleas, ocurriendo lo mismo con la correa que soporta la pieza a manipular. De este modo, debido a la utilización de correas que están diseñadas adecuadamente, en lugar de cadenas que imparten una rotación discontinua y torpe, mediante hacer girar la pieza que está suspendida de estas correas se consigue un movimiento suave.
En la torre satélite, las poleas discurren accionadas libremente por la correa, y junto con la otra polea situada en la torre principal que está acoplada al motor con reductor que acciona la correa y, por lo tanto, hace girar la pieza a manipular.
BREVE DESCRIPCIÓN DE LOS DIBUJOS 20 La siguiente descripción está basada, mediante ejemplos no limitativos, en los dibujos adjuntos, en los cuales:
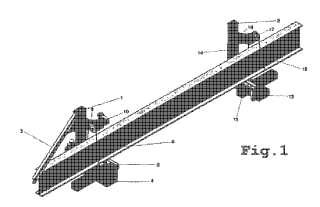
la figura 1 es una vista, en perspectiva, del dispositivo de manipulación de piezas con las dos torres;
la figura 2 es una vista, en perspectiva, de la torre principal que comprende un brazo de carga articulado, un brazo de carga fijo, un motor con reductor, el cabrestante y el dispositivo hidráulico;
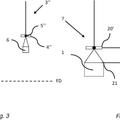
la figura 3 es una vista, en perspectiva, de la torre satélite del dispositivo de manipulación de piezas; y
la figura 4 es una vista de la torre principal, que comprende un brazo de carga fijo, un brazo de carga articulado, un motor con reductor, el cabrestante y el dispositivo hidráulico.
LEYENDA DE LAS FIGURAS
Torre principal -1- Torre satélite -2-
Brazo de carga articulado -3- Base de soporte -4-
Columna telescópica -5- Caballete -6- Polea -7- Correa -8-
Brazo de carga fijo -9- Motor con reductor -10- Cabrestante -11- Dispositivo hidráulico -12-
Base de soporte -13- Columna telescópica -14-Caballete -15- Brazo de carga -16- Polea -17-
Correa -18-
DESCRIPCIÓN DETALLADA DE LA INVENCIÓN
La presente invención se refiere a un dispositivo de manipulación de piezas, utilizado en particular para elevar y 60 hacer girar piezas de estructura alargada, tales como perfiles metálicos con diferentes secciones.
Tal como se representa en la figura 1, el dispositivo comprende, por lo menos, una torre, la torre principal -1-, y una torre satélite -2- conectada mediante un tubo flexible de un dispositivo hidráulico (no mostrado en las figuras) , presentando cada torre una base de soporte -4-, -13-.
La torre principal -1- y la torre satélite -2- tienen varios componentes idénticos, tales como una columna telescópica -5-, -14-, un caballete -6-, -15- y un brazo de carga fijo -9-, -16-, una polea -7-, -17- en la que discurre una correa -8-, -18- que proporciona soporte a la pieza a manipular y la hace girar.
Una función de la torre principal -1- es controlar la elevación y rotación de la pieza a manipular en el dispositivo de manipulación de piezas, lo que incluye la elevación de la columna telescópica -5- y de la columna telescópica -14de la torre satélite -2-, y la rotación de la correa -8- y de la correa -18- de la torre satélite -2-, moviéndose ésta última mediante la acción de la propia pieza, de modo que la pieza a manipular se mueve de manera sincronizada.
Tal como se muestra en la figura 1, la altura de las columnas telescópicas -5-, -14- puede regularse mediante un dispositivo hidráulico -12- que tiene un recorrido variable, el cual puede modificarse a voluntad y en función del tamaño de las piezas a manipular, y que tiene un sistema de limitación de la carga que impide cualquier movimiento si la pieza a manipular tiene un peso mayor que la fuerza de elevación para la que están diseñadas las torres -1-, -2-.
La altura del caballete -6- y del caballete -15-, mostrados en las figuras 2 y 4 y en la figura 3, respectivamente, es regulable manualmente proporcionando... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de manipulación de piezas utilizado, en particular, para la elevación y rotación de hasta 360º de dichas piezas, comprendiendo el dispositivo por lo menos una torre, la torre principal (1) , y una torre satélite (2) conectada 5 mediante un tubo flexible de un dispositivo hidráulico, presentando cada torre una base de soporte (4, 13) ,
caracterizado porque cada una de las torres, la torre principal (1) y la torre satélite (2) , incluye:
- una columna telescópica (5, 14) cuya altura puede ser regulada mediante un dispositivo hidráulico (12) que tiene un recorrido variable, que puede modificarse a voluntad y en función del tamaño de las piezas a manipular, y que tiene un sistema de límite de la carga que impide cualquier movimiento si la pieza a manipular tiene un peso mayor que la fuerza de elevación para la que están diseñadas las torres (1, 2) ;
- un caballete (6, 15) cuya altura es regulable manualmente proporcionando soporte a la pieza a manipular;
- un brazo de carga fijo (9, 16) acoplado a la parte superior de la columna telescópica (5, 14) , en el que está montada una polea (7, 17) en la que discurre una correa (8, 18) que proporciona soporte a la pieza a manipular y la hace girar.
2. Dispositivo de manipulación de piezas, según la reivindicación 1, caracterizado porque dicha torre principal (1) comprende asimismo:
- un motor con reductor (10) con un variador de velocidad que permite múltiples velocidades de rotación de la polea 25 (7) ;
- un dispositivo hidráulico (12) situado en la torre (1) para desplazar la columna telescópica (5) y la columna telescópica (14) mediante un tubo flexible de un dispositivo hidráulico que conecta las dos torres (1, 2) ; y
- un brazo de carga articulado (3) situado en la parte superior de la columna telescópica (5) , que lleva a cabo una rotación de 270º horizontalmente alrededor de la columna telescópica (5) , en el que un cabrestante eléctrico (11) está acoplado y puede ser desplazado manualmente a lo largo del brazo de carga (3) para ayudar a situar las piezas a soldar en la parte superior y/o los laterales de la pieza manipulada.
(8) para desplazar la pieza manipulada de manera sincronizada.
5. Dispositivo de manipulación de piezas, según las reivindicaciones anteriores, caracterizado porque elevar la 45 pieza a manipular, en la columna telescópica (5) y la columna telescópica (14) , de manera estrictamente horizontal y controlando la carga durante el desplazamiento, permite un control total de la estabilidad en cada una de las torres (1, 2) , dado que durante todo el ciclo de trabajo la pieza a manipular permanece siempre a la misma distancia de las torres (1, 2) , evitando por lo tanto cualesquiera colisiones con cualquiera de estas.
6. Dispositivo de manipulación de piezas, según las reivindicaciones anteriores, caracterizado porque cuando se trabaja con piezas pequeñas a manipular, la torre (1) puede mover dichas piezas a manipular de manera autónoma e independiente respecto de la torre (2) , mediante la inactivación del tubo flexible del dispositivo hidráulico.
Patentes similares o relacionadas:
 Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Flujo de video modificado para soportar el control remoto de una grúa de contenedores, del 18 de Diciembre de 2019, de ABB SCHWEIZ AG: Un procedimiento para soportar el control remoto de una grúa de contenedores , estando configurada la grúa de contenedores para desplazar contenedores de una posición […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Grúa de torre y procedimiento para el montaje de una pala de rotor de turbina eólica, del 22 de Mayo de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa de torre con un torre compuesta de al menos un elemento de torre, en particular una pieza de rejilla, y preferentemente con un elemento de arriostramiento […]
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Agarradera para aparato de manipulación de carga y grúa, del 14 de Marzo de 2019, de KONECRANES GLOBAL CORPORATION: Una agarradera para un aparato de manipulación de carga, que comprende un dispositivo de medición de la distancia óptica y medios de sujeción (106, […]