Determinación de una fuerza que actúa sobre un mecanismo de dirección.
Procedimiento para determinar por medio de un estimador (21) una fuerza (Fz) que actúa desde fuera,
a través de un varillaje de dirección (13), sobre un mecanismo de dirección (11) de un dispositivo de dirección (2) de un vehículo, en donde el dispositivo de dirección (2) lleva asociado un motor (7) para generar un par motor (tor_RA), caracterizado por que la fuerza (Fz) actuante desde fuera se estima por medio del estimador (21) en función de un par motor efectivo (tor_RAef), determinándose el par motor efectivo (tor_RAef) en función de un rendimiento y obteniéndose el rendimiento en función de la fuerza estimada (Fz).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/051665.
Solicitante: ZF LENKSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: RICHARD-BULLINGER-STRASSE 77 73527 SCHWÄBISCH GMÜND ALEMANIA.
Inventor/es: WERNER, THOMAS, GRÜNER,STEFAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D113/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Posición de elementos del mecanismo de dirección, p. ej. de las ruedas directrices o del volante.
- B62D119/00 B62D […] › Par en el volante.
- B62D121/00 B62D […] › Fuerza aplicada a la timonería de dirección.
- B62D137/00 B62D […] › Condiciones no especificadas en los grupos B62D 101/00 - B62D 135/00.
- B62D6/00 B62D […] › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
PDF original: ES-2420994_T3.pdf
Fragmento de la descripción:
Determinación de una fuerza que actúa sobre un mecanismo de dirección.
La invención concierne a un procedimiento para determinar por medio de un estimador una fuerza que actúa desde fuera, a través de un varillaje de dirección, sobre un mecanismo de dirección de un dispositivo de dirección de un vehículo, estando asociado al dispositivo de dirección un motor para generar un par de dirección.
La invención concierne también a un aparato de control para controlar/regular un dispositivo de dirección de un vehículo, en donde el dispositivo de dirección comprende un varillaje de dirección, un mecanismo de dirección y un motor para generar un par de dirección, y en donde el aparato de control presenta medios para detectar un par del motor y un estimador para determinar una fuerza que actúa desde fuera sobre el mecanismo de dirección.
La invención concierne también a un programa informático que es apto para desarrollarse en un aparato de control destinado a controlar/regular un dispositivo de dirección.
En los modernos dispositivos de dirección, especialmente en una servodirección eléctrica (EPS) o en un llamado sistema de dirección por cable (SbW) , se establece un nivel de fuerza que se aplica después a un medio de dirección, por ejemplo un volante, y que contrarresta la fuerza aplicada por el conductor o amplifica la fuerza aplicada por el conductor, para conferirle al conductor una sensación de marcha correspondiente a la situación de marcha actual y notificarle como retorno a través del volante, por ejemplo, informaciones sobre el estado actual de la calzada. La altura de este nivel de fuerza depende así del estado de marcha actual y especialmente de las fuerzas de guiado lateral o de las fuerzas resultantes de éste que actúan sobre la dirección a través de un varillaje de dirección, por ejemplo barras de acoplamiento.
Para la determinación del nivel de fuerza es conocido el recurso de determinar la fuerza de guiado lateral a partir de una aceleración transversal medida con sensores correspondientes. Es conocido también el recurso de determinar la aceleración transversal por medio de un modelo de vehículo a partir de un ángulo de dirección actual y una velocidad actual del vehículo y deducir de ello la fuerza de guiado lateral. En este caso, se tiene que generar un modelo adecuado para cada vehículo en el que deba determinarse la aceleración transversal de esta manera, pero esto consume mucho tiempo y es costoso.
En el documento DE 101 15 018 A1 se ha descrito un procedimiento por medio del cual se puede calcular o ajustar el nivel de fuerza deseado a partir de señales internas a la dirección. A este fin, se determina primeramente un par motor para un motor eléctrico asociado a la dirección, el cual es necesario para posibilitar una acción de dirección exenta de pares. Este par motor se multiplica después por un factor que depende de una velocidad actual del vehículo y un par manual actual aplicado por un conductor. Esto da como resultado entonces el nivel de fuerza deseado.
Se conoce también por el documento DE 101 15 018 A1 el recurso de aprovechar magnitudes perturbadoras, como, por ejemplo, fuerzas de las barras de acoplamiento, para el cálculo del nivel de fuerza deseado. Es cierto que tales magnitudes perturbadoras son en principio mensurables, pero, por motivos de costes, no se utiliza una técnica de medida correspondiente en vehículos. Por esta razón, se estiman estas magnitudes perturbadoras.
En el documento EP 2 050 655 A2 se revela un procedimiento para estimar una fuerza que actúa desde fuera sobre un mecanismo de dirección. En este caso, se establece un par de asistencia nominal en función de un valor de sensor de par de giro, añadiéndose aditivamente una porción de compensación a efectos de estabilización con el fin de conseguir un retroaviso mejorado para el conductor.
El cometido de la presente invención consiste en proporcionar una posibilidad para determinar fuerzas de barras de acoplamiento o, en general, fuerzas que actúan desde fuera sobre un mecanismo de dirección a través de un varillaje de dirección. Tales fuerzas que actúan desde fuera son predominantemente las llamadas fuerzas de guiado lateral que corresponden a las llamadas fuerzas de las barras de acoplamiento. Cuando el dispositivo de dirección está configurado como una dirección de cremallera, las fuerzas de las barras de acoplamiento actúan entonces sobre la cremallera unida con las barras de acoplamiento. Las fuerzas de las barras de acoplamiento corresponden así – exceptuando los efectos de fricción y/o de inercia a tener eventualmente en cuenta – a las llamadas fuerzas de la cremallera.
El problema se resuelve con un procedimiento de la clase citada al principio por el hecho de que se estima la fuerza actuante desde fuera en función de un par motor efectivo, determinándose el par motor efectivo en función de un par motor y un rendimiento y determinándose el rendimiento en función de la fuerza estimada.
El par motor es el par con el que el motor configurado, por ejemplo, como motor eléctrico o servomotor contribuye a genera el par de dirección. Este par motor no es alimentado ahora directamente al estimador o al observador, sino que es contabilizado con un rendimiento. Por ejemplo, se multiplica el par motor por el rendimiento. El rendimiento a su vez se establece en función de la fuerza estimada. En consecuencia, tiene lugar un reacoplamiento de la fuerza estimada debido a que esta fuerza estimada ejerce siempre influencia sobre la determinación del par motor efectivo, el cual a su vez se aprovecha para la determinación o la observación de la fuerza actuante desde fuera, alimentándose el par motor efectivo al estimador como magnitud de entrada.
Por tanto, el rendimiento determinado según la invención depende de la carga. Es posible así una determinación especialmente exacta de la fuerza actuante desde fuera o de la fuerza de la cremallera. El procedimiento según la invención trabaja con especial eficiencia, ya que se puede materializar un reacoplamiento de manera sencilla y éste posibilita una determinación precisa del rendimiento.
Preferiblemente, se estima además la fuerza en función de un ángulo del rotor del motor. El ángulo del rotor corresponde a un ángulo de dirección actual, de modo que, en lugar del ángulo del rotor, se puede emplear también un ángulo de dirección captado de otra manera, por ejemplo por medio de un sensor de ángulo. El ángulo del rotor se alimenta al estimador como entrada adicional. Por medio del ángulo de rotor o ángulo de dirección captado se puede deducir un estado de movimiento de la dirección.
Ventajosamente, se forma una suma de un par de dirección actuante sobre la dirección a través del árbol de dirección y el par motor. El par motor efectivo se determina entonces en función de esta suma. Por tanto, la suma describe el par que actúa realmente por el lado del vehículo sobre el mecanismo de dirección o sobre la cremallera y al cual contrarrestan las fuerzas que actúan desde fuera. Para captar el par de dirección que actúa sobre la dirección a través del árbol de dirección puede estar montado en la barra de torsión un sensor adecuado por medio del cual se establezca el par aplicado por un conductor, por ejemplo en un volante. Es especialmente ventajoso que se tengan aquí en cuenta las pérdidas que se originan, por ejemplo, a través de articulaciones o guías o cojinetes de la barra de torsión y/o en el mecanismo de dirección. En consecuencia, se puede incrementar así una vez más la exactitud de la fuerza estimada.
El par motor puede describir un par real en una forma de realización. En consecuencia, se determinan así las fuerzas que estaban aplicadas en el momento de la captación del par real. Es especialmente ventajoso que el par motor describa un par nominal. Por tanto, mientras se activa el motor para conseguir el par nominal, se pueden establecer ya las fuerzas que actúan entonces desde fuera con respecto a este par nominal y que pueden tenerse ya entonces en cuenta para ajustar el nivel de fuerza deseado que se debe presentar en el volante. Es posible así una presentación especialmente exenta de retardo del nivel de fuerza en el volante.
Preferiblemente, se establece también el par motor efectivo en función del ángulo de dirección o del ángulo actual del rotor del motor. Dado que el ángulo del rotor y, por tanto, el ángulo de dirección tienen influencia sobre la transmisión de las fuerzas actuantes desde fuera sobre la dirección, se consigue una determinación mejorada del par motor efectivo teniendo en cuenta el ángulo del rotor o el ángulo de dirección, lo que hace posible una determinación... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar por medio de un estimador (21) una fuerza (Fz) que actúa desde fuera, a través de un varillaje de dirección (13) , sobre un mecanismo de dirección (11) de un dispositivo de dirección (2) de un vehículo, en donde el dispositivo de dirección (2) lleva asociado un motor (7) para generar un par motor (tor_RA) , caracterizado por que la fuerza (Fz) actuante desde fuera se estima por medio del estimador (21) en función de un par motor efectivo (tor_RAef) , determinándose el par motor efectivo (tor_RAef) en función de un rendimiento y obteniéndose el rendimiento en función de la fuerza estimada (Fz) .
2. Procedimiento según la reivindicación 1, caracterizado por que la fuerza (Fz) se estima en función de un ángulo de dirección, especialmente un ángulo de rotor (ang_RA) del motor (7) .
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por que se forma un par suma (tor_Sum) como una suma de un par de dirección (tor_TB) , que actúa sobre el dispositivo de dirección (2) a través de un árbol de dirección, y del par motor (tor_RA) , y se determina el par motor efectivo (tor_RAef) en función del par suma (tor_Sum) .
4. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que el par motor (tor_RA) describe un par real o un par nominal.
5. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que el par motor efectivo (tor_RAef) se obtiene en función de un ángulo de rotor (ang_RA) del motor (7) .
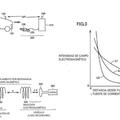
6. Procedimiento según la reivindicación 5, caracterizado por que se obtiene el rendimiento por medio de al menos una curva característica (31, 32) .
7. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que se obtiene el rendimiento en función de una dirección de flujo de potencia del motor (7) .
8. Procedimiento según la reivindicación 7, caracterizado por que se obtiene la dirección de flujo de potencia en función del par motor (tor_RA) y un ángulo de rotor (ang_RA) del motor (7) .
9. Aparato de control (1) para controlar/regular un dispositivo de dirección (2) en un vehículo, en donde el dispositivo de dirección (2) comprende un varillaje de dirección (13) , un mecanismo de dirección (11) y un motor (7) , y en donde el aparato de control (1) presenta medios para captar un par motor (tor_RA) y un estimador (21) para determinar una fuerza (Fz) que actúa desde fuera sobre el mecanismo de dirección (11) , caracterizado por que el estimador (21) está concebido para determinar la fuerza (Fz) a partir de un par motor efectivo (tor_RAef) y el aparato de control (1) presenta una funcionalidad (20) para determinar un rendimiento en función de la fuerza (Fz) realimentada por el estimador (21) a la funcionalidad (20) y para determinar el par motor efectivo (tor_RAef) en función del par motor (tor_RA) y el rendimiento.
10. Aparato de control (1) según la reivindicación 9, caracterizado por que el estimador (21) está concebido para determinar la fuerza (Fz) en función de un ángulo de dirección, especialmente un ángulo de rotor (ang_RA) del motor (7) .
11. Aparato de control (1) según la reivindicación 9 ó 10, caracterizado por que el par motor (tor_RA) describe un par real o un par nominal.
12. Aparato de control (1) según cualquiera de las reivindicaciones 9 a 11, caracterizado por que la funcionalidad
(20) está concebida para obtener el par motor efectivo (tor_RAef) en función de un ángulo de rotor (ang_RA) del motor (7) .
13. Aparato de control (1) según cualquiera de las reivindicaciones 9 a 12, caracterizado por que en el aparato de control (1) está archivada al menos una curva característica (31, 32) para la obtención del rendimiento.
14. Aparato de control (1) según cualquiera de las reivindicaciones 9 a 13, caracterizado por que la funcionalidad
(20) está concebida para obtener el rendimiento en función de una dirección de flujo de potencia del motor (7) .
15. Aparato de control (1) según la reivindicación 14, caracterizado por que la funcionalidad (20) está concebida para obtener la dirección de flujo de potencia en función del par motor (tor_RA) y un ángulo de rotor (ang_RA) del motor (7) .
16. Programa informático que es apto para desarrollarse en un aparato de control (1) destinado a controlar y/o regular un dispositivo de dirección (2) , especialmente en un microprocesador (3) del aparato de control (1) , caracterizado por que el programa informático está programado para poner en práctica un procedimiento según cualquiera de las reivindicaciones 1 a 8.
17. Programa informático según la reivindicación 16, caracterizado por que el programa informático está almacenado en un elemento de memoria (5) .
Patentes similares o relacionadas:
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Procedimiento para el control de la dirección y el comportamiento de un vehículo, del 13 de Noviembre de 2019, de Sentient IP AB: Un procedimiento para controlar un accionador de par de torsión de retroalimentación y al menos un accionador de guiñada y/o del estado lateral del vehículo, tal como […]
 Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Sistema de modificación de la relación de dirección para vehículo con brazo telescópico y vehículo correspondiente, del 3 de Julio de 2019, de MANITOU BF: Sistema de modificación de la relación de dirección para un vehículo con brazo telescópico inclinable, comprendiendo el vehículo ruedas directrices […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Máquina automóvil con instalación de carga, del 8 de Mayo de 2019, de Wacker Neuson Linz GmbH: Máquina automóvil con una instalación de carga , un accionamiento de rodadura y un tren de rodadura , tal como una cargadora de ruedas, una cargadora telescópica o similares, […]
Procedimiento de estabilización de conducción, dispositivo de estabilización de conducción y vehículo equipado con dicho dispositivo, del 6 de Mayo de 2019, de WABCO GMBH: Procedimiento de estabilización de conducción en el que, para la estabilización de un vehículo , especialmente de un vehículo industrial, se cambia un ángulo […]
Sistema de guiado de vehículo, del 11 de Diciembre de 2018, de Topcon Precision Agriculture Pty Ltd: Una combinación de sistema de guiado de vehículo y mecanismo de volante para un vehículo, con el vehículo incluyendo un mecanismo de volante que incluye un volante […]