PROCEDIMIENTO DE FUNCIONAMIENTO DE UN DISPOSITIVO DE SERVODIRECCION ELECTRICA.
Procedimiento de funcionamiento de un dispositivo de servodirección eléctrica (1) de un vehículo automóvil,
que comprende:
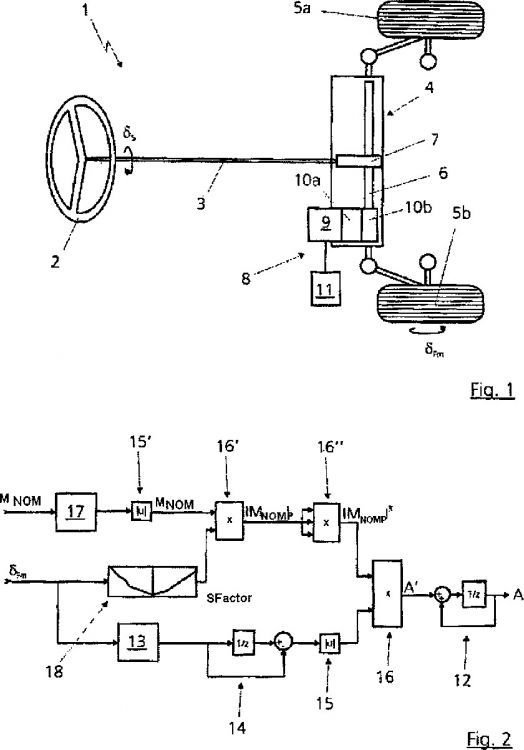
- un mando de dirección (2) para prefijar un ángulo de volante (dS) como medida de un ángulo de dirección deseado (dFm) para al menos una rueda dirigible (5a, 5b) del vehículo automóvil; y
- un servoaccionamiento eléctrico (8) con un motor eléctrico (9) para materializar la asistencia de dirección por medio de un engranaje (10b) de circulación de bolas,
caracterizado porque
- se obtiene continuamente durante el funcionamiento un grado de desgaste (A) de al menos una parte del engranaje (10b) de circulación de bolas a partir de al menos una magnitud caracterizadora de la posición de la cremallera (6) del dispositivo de servodirección eléctrica (1) y de una magnitud caracterizadora del par del motor eléctrico (9), y
- se suma y/o se integra el grado de desgaste (A) -obtenido continuamente durante el funcionamiento- de al menos la parte del engranaje (10b) de circulación de bolas a partir de valores de esfuerzo actuales (A'')
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08101301.
Solicitante: ZF LENKSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: RICHARD-BULLINGER-STRASSE 77,73527 SCHWABISCH GMUND.
Inventor/es: HEILIG, ARNULF, FROHLICH,STEFAN, HILLENBRAND,INGO.
Fecha de Publicación: .
Fecha Solicitud PCT: 6 de Febrero de 2008.
Fecha Concesión Europea: 21 de Abril de 2010.
Clasificación Internacional de Patentes:
- B62D5/04M2B
- B62D5/04P6
Clasificación PCT:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
- G01M13/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayos de partes de la máquina.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento de funcionamiento de un dispositivo de servodirección eléctrica.
Campo técnico
La invención concierne a un procedimiento de funcionamiento de un dispositivo de servodirección eléctrica según el preámbulo de la reivindicación 1. La invención concierne también a un programa informático y un producto de programa informático con medios de código de programa para ejecutar un procedimiento de esta clase. Además, la invención concierne a un dispositivo de servodirección eléctrica.
Estado de la técnica
Los sistemas electrónicos y/o electromecánicos están muchas veces expuestos durante su funcionamiento a altas cargas originadas por fuerzas, temperaturas, presiones o similares. En el estado montado y/o durante el funcionamiento no son frecuentemente posibles una captación del esfuerzo y/o una captación de una fatiga del componente. En muchas ocasiones, los propios componentes son sólo difícilmente accesibles para trabajos de mantenimiento. Por tanto, es conocido el recurso de que los componentes relevantes para la seguridad, por ejemplo en sistemas de freno y/o de dirección en un vehículo, se dimensionen con un alto margen de seguridad. Sin embargo, los componentes dimensionados de esta manera necesitan más espacio de montaje y/o tienen un peso mayor. Además, el dimensionamiento con margen de seguridad está ligado en general también a altos costes.
El documento DE 100 14 994 A1 concierne a un dispositivo y a un procedimiento de almacenamiento y/o evaluación de datos en una memoria de un vehículo, en donde se transmiten los datos a través de un bus de datos del vehículo al que están conectados y se pueden conectar componentes, tales como sistemas del vehículo, sensores, actuadores y otros componentes del vehículo. La memoria está construida aquí como un medio de memoria central para los componentes unidos con el bus de datos y está unida también con el bus de datos del vehículo. Los datos se almacenan aquí permanentemente en el medio de memoria durante todo el espacio de tiempo de utilización del vehículo. Además, los datos son interpretados de manera preferida con ayuda de medios de evaluación que pueden unirse con el medio de memoria de modo que resulte una medida de un uso y/o de un desgaste del vehículo y/o de los componentes.
La dirección electromecánica de un vehículo automóvil descrita en el documento DE 103 60 582 A1 comprende medios para captar los pares de dirección aplicados por el conductor, medios para captar los pares auxiliares de un servomotor eléctrico de la dirección y/o medios para captar las corrientes de dirección del servomotor eléctrico. El sistema puede prever también medios para captar la temperatura del sistema de la dirección y medios para captar el tiempo de funcionamiento. Un equipo de control y evaluación obtiene, en función de los valores captados, al menos un valor indicativo característico como al menos un grado de daño y, al sobrepasarse al menos un grado de daño prefijado, genera una señal de salida o produce una salida de información.
Además, el documento DE 103 01 542 A1 muestra un procedimiento y un dispositivo de análisis de esfuerzos de al menos un componente de sistema no visible en un vehículo por medio de al menos una unidad de evaluación, en donde el componente del sistema está construido con al menos un elemento sensor, y el elemento sensor detecta una deformación del componente del sistema y transmite una señal a la unidad de evaluación. El elemento sensor está construido preferiblemente como un material inteligente que emite una señal eléctrica al producirse una deformación. Como componentes críticos para la seguridad, generalmente no visibles, se citan, por ejemplo, una cremallera y/o un engranaje de tornillo sinfín de una dirección electromecánica. Un fallo de estos componentes puede conducir, por ejemplo, a un bloqueo de la dirección.
Se conoce por el documento DE 100 52 275 A1 un dispositivo de servodirección que está concebido como servodirección para una vehículo automóvil, en donde un mando de dirección configurado como volante sirve para hacer que bascule una rueda dirigible. La rueda está unida articuladamente de manera conocida con palancas de dirección de rueda y, por cada barra, con un componente desplazable, tal como, por ejemplo, una biela o una cremallera, de un engranaje, tal como, por ejemplo, un engranaje de circulación de bolas. Un servomotor eléctrico está unido para accionamiento con el componente desplazable del engranaje. Una polea montada en el árbol del servomotor, que está unida operativamente a través de una correa dentada con una polea del lado de entrada montada en el engranaje, sirve para establecer una unión exenta de holgura entre el servomotor eléctrico y el engranaje.
Se conoce por el documento DE 10 2004 037 599 A1 un engranaje de tornillo de bolas para un sistema de dirección electromecánico de un vehículo.
El documento DE 103 33 909 A1 describe una tuerca de dirección para un mecanismo impulsor de rosca de bolas. Además, se describen un mecanismo impulsor de rosca de bolas de esta clase y una dirección de vehículo automóvil equipada con éste, especialmente una dirección eléctrica.
Sería deseable obtener para tales engranajes de circulación de bolas o mecanismos impulsores de rosca de bolas o sus componentes dentro de sistemas de dirección electromecánicos una impresión de su grado de esfuerzo o de daño.
Exposición de la invención
Por consiguiente, la presente invención se basa en el problema de proporcionar, atendiendo al criterio del mantenimiento de una alta seguridad, una vigilancia adecuada del deterioro o del desgaste de al menos una parte de un engranaje de circulación de bolas de un dispositivo de servodirección eléctrica o electrónica.
Este problema se resuelve según la invención por medio de las características citadas en la reivindicación 1.
Como quiera que se obtiene continuamente durante el funcionamiento un grado de desgaste de al menos una parte del engranaje de circulación de bolas a partir de al menos una magnitud caracterizadora de la posición de la cremallera del dispositivo de servodirección eléctrica y de una magnitud caracterizadora del par del motor eléctrico, se puede indicar siempre de manera ventajosa un valor distintivo característico fiable para un grado de esfuerzo o de daño del engranaje de circulación de bolas o de la al menos una parte del engranaje de circulación de bolas. Por tanto, se efectúa un análisis del estado del engranaje de circulación de bolas en cuanto a desgaste, intensidad de uso y carga.
Es muy ventajoso que se sume y/o se integre el grado de desgaste -obtenido continuamente durante el funcio- namiento- de al menos la parte del engranaje de circulación de bolas a partir de valores de esfuerzo actuales.
Es posible así señalizar que se ha alcanzado al menos aproximadamente el final de la vida útil del engranaje de circulación de bolas o del mecanismo impulsor de rosca de bolas o de sus partes.
En una ejecución también muy ventajosa de la invención se puede obtener el grado de desgaste de al menos la parte del engranaje de circulación de bolas a partir de una magnitud caracterizadora del camino recorrido de la cremallera del dispositivo de servodirección eléctrica.
Como magnitud caracterizadora de la posición de la cremallera del dispositivo de servodirección eléctrica se puede emplear el ángulo de dirección o un ángulo del rotor del motor eléctrico.
Como alternativa o adicionalmente, la magnitud caracterizadora de la posición de la cremallera del dispositivo de servodirección eléctrica puede ser captada también por medio de un sensor de posición de la cremallera.
Según la invención, puede estar previsto que se obtenga un valor absoluto de la variación del ángulo de dirección con ayuda de la magnitud caracterizadora de la posición o del camino recorrido de la cremallera del dispositivo de servodirección eléctrica.
Como magnitud caracterizadora del par del motor eléctrico se puede emplear un valor absoluto de un par nominal especialmente actual o momentáneo del motor o un valor absoluto de un par en particular actualmente actuante del motor eléctrico.
Es ventajoso que el valor absoluto del par nominal del motor o el valor absoluto del par actuante del motor eléctrico se pondere especialmente por una multiplicación por un factor de desgaste dependiente del ángulo de dirección especialmente actual.
Mediante la ponderación del par del motor...
Reivindicaciones:
1. Procedimiento de funcionamiento de un dispositivo de servodirección eléctrica (1) de un vehículo automóvil, que comprende:
- un mando de dirección (2) para prefijar un ángulo de volante (dS) como medida de un ángulo de dirección deseado (dFm) para al menos una rueda dirigible (5a, 5b) del vehículo automóvil; y
- un servoaccionamiento eléctrico (8) con un motor eléctrico (9) para materializar la asistencia de dirección por medio de un engranaje (10b) de circulación de bolas,
caracterizado porque
- se obtiene continuamente durante el funcionamiento un grado de desgaste (A) de al menos una parte del engranaje (10b) de circulación de bolas a partir de al menos una magnitud caracterizadora de la posición de la cremallera (6) del dispositivo de servodirección eléctrica (1) y de una magnitud caracterizadora del par del motor eléctrico (9), y
- se suma y/o se integra el grado de desgaste (A) -obtenido continuamente durante el funcionamiento- de al menos la parte del engranaje (10b) de circulación de bolas a partir de valores de esfuerzo actuales (A').
2. Procedimiento según la reivindicación 1, caracterizado porque se obtiene el grado de desgaste (A) de al menos la parte del engranaje (10b) de circulación de bolas a partir de una magnitud caracterizadora del camino recorrido de la cremallera (6) del dispositivo de servodirección eléctrica (1).
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque se emplea como magnitud caracterizadora de la posición de la cremallera (6) del dispositivo de servodirección eléctrica (1) el ángulo de dirección (dFm) o un ángulo del rotor del motor eléctrico (9).
4. Procedimiento según la reivindicación 1 ó 2, caracterizado porque se capta la magnitud caracterizadora de la posición de la cremallera (6) del dispositivo de servodirección eléctrica (1) por medio de un sensor de posición de la cremallera.
5. Procedimiento según cualquiera de las reivindicaciones 2 a 4, caracterizado porque se obtiene un valor absoluto de la variación del ángulo de dirección con ayuda de la magnitud caracterizadora de la posición o del camino recorrido de la cremallera (6) del dispositivo de servodirección eléctrica (1).
6. Procedimiento según cualquiera de las reivindicaciones 1 a 5, caracterizado porque se emplea como magnitud caracterizadora del par del motor eléctrico (9) un valor absoluto del par nominal de motor (
7. Procedimiento según la reivindicación 6, caracterizado porque se pondera el valor absoluto del par nominal de motor (
8. Procedimiento según la reivindicación 6 ó 7, caracterizado porque el valor de esfuerzo actual obtenido (A') que se debe integrar o sumar es el resultado de un producto del valor absoluto de la variación del ángulo de dirección y del valor absoluto elevado al cubo del par nominal de motor ponderado (
9. Procedimiento según cualquiera de las reivindicaciones 1 a 8, caracterizado porque el grado de desgaste sumado y/o integrado -obtenido continuamente durante el funcionamiento- de al menos la parte del engranaje (10b) de circulación de bolas se almacena especialmente en una memoria no volátil de un aparato de control (11) del dispositivo de servodirección eléctrica (1).
10. Procedimiento según cualquiera de las reivindicaciones 1 a 9, caracterizado porque, al sobrepasarse un valor límite prefijado por el grado de desgaste sumado y/o integrado de al menos la parte del engranaje (10b) de circulación de bolas, se emite una señal y/o se almacena una entrada en una memoria de errores del dispositivo de servodirección eléctrica (1) o del vehículo automóvil.
11. Procedimiento según cualquiera de las reivindicaciones 1 a 10, caracterizado porque el grado de desgaste sumado y/o integrado de al menos la parte del engranaje (10b) de circulación de bolas puede ser legible para fines de diagnóstico.
12. Programa informático con medios de código de programa para poner en práctica un procedimiento según cualquiera de las reivindicaciones 1 a 11 cuando se ejecuta el programa en un microprocesador de un ordenador, especialmente en un aparato de control (11) de un dispositivo de servodirección eléctrica (1) de un vehículo auto- móvil.
13. Producto de programa informático con medios de código de programa que están almacenados en un soporte de datos legible por ordenador para poner en práctica un procedimiento según cualquiera de las reivindicaciones 1 a 11 cuando se ejecuta el programa en un microprocesador de un ordenador, especialmente en un aparato de control (11) de un dispositivo de servodirección eléctrica (1).
14. Dispositivo de servodirección eléctrica (1) de un vehículo automóvil, que comprende:
- un mando de dirección (2) para prefijar un ángulo de volante (dS) como medida de un ángulo de dirección deseado (dFm) para al menos una rueda dirigible (5a, 5b) del vehículo automóvil,
- un servoaccionamiento eléctrico (8) con un motor eléctrico (9) para materializar la asistencia de dirección a través de un engranaje (10b) de circulación de bolas y
- un aparato de control electrónico (11) para activar y regular el motor eléctrico (9),
caracterizado porque el aparato de control electrónico (11) está preparado para ejecutar un programa informático según la reivindicación 12.
Patentes similares o relacionadas:
TRANSMISIÓN DE ROSCA A BOLAS, del 27 de Junio de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Transmisión de rosca a bolas que comprende una tuerca de husillo dispuesta de forma giratorias sobre un husillo y bolas que circulan en canales de bolas […]
CREMALLERA O VÁSTAGO ROSCADO, del 29 de Marzo de 2011, de THYSSENKRUPP PRESTA AKTIENGESELLSCHAFT: Cremallera o vástago roscado, en particular para un dispositivo de dirección para un vehículo, que consta de una primera pieza en forma de barra […]
CREMALLERA O VÁSTAGO ROSCADO, del 29 de Marzo de 2011, de THYSSENKRUPP PRESTA AKTIENGESELLSCHAFT: Cremallera o vástago roscado para un dispositivo de dirección para un automóvil, que comprende una primera pieza en forma de varilla que como elemento de funcionamiento […]
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]