Dispositivo de detección de ángulo de calado de motor.
Motor de tipo monocilindro que tiene un dispositivo detector de ángulo de calado,
incluyendo:
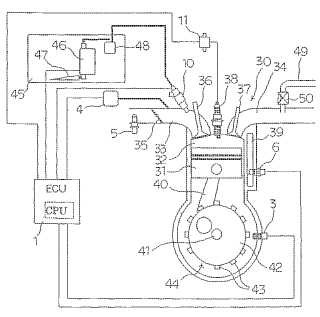
un engranaje anular fijado a un cigüeñal del motor monocilindro, donde el engranaje anular tiene múltiples salientes(43) formados alrededor de su periferia exterior a intervalos iguales excepto en una posición donde falta un saliente,formando una porción de intervalo irregular (44), y
un sensor de ángulo de calado (3) capaz de detectar el inicio y el fin en ambos lados de cada saliente mientras elengranaje anular está girando con relación al sensor de ángulo de calado, donde el dispositivo detector de ángulo decalado detecta una longitud lateral (a) de cada saliente así como una longitud de intervalo (b) entre dos salientesadyacentes (43), y calcula una relación de un pulso de manivela entre la longitud lateral (a) de un saliente y lalongitud de intervalo (b) para identificar la porción de intervalo irregular (44),
donde el sensor de ángulo de calado (3) está colocado con respecto a la porción de intervalo irregular (44) de modoque uno de los salientes (43) junto a la porción de intervalo irregular (44) mire al sensor de ángulo de calado (3)cuando el pistón del motor esté colocado en el punto muerto inferior.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2002/010430.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: YAMASHITA,TOSHIHIKO, NAKAMURA,TOMOJI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/245 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando un número variable de pulsos en un tren.
PDF original: ES-2396678_T3.pdf
Fragmento de la descripción:
Dispositivo de detección de ángulo de calado de motor
La invención se refiere a un motor que tiene un dispositivo detector de ángulo de calado según la reivindicación 1.
Con el fin de detectar una posición angular de cigüeñal del motor, un engranaje anular está fijado al cigüeñal, y tiene múltiples salientes (dientes) formados a intervalos iguales así como una porción sin diente dispuesta de manera que tenga un paso irregular para determinar la posición de referencia del cigüeñal. La determinación de los salientes y rebajes mientras el motor está girando para identificar la porción sin diente, es decir, una posición de referencia por medio de una relación entre los salientes y los rebajes permite detectar el ángulo de calado. El tiempo de inyección de carburante y el tiempo de encendido son controlados en base al ángulo de calado detectado.
En este caso, cuando cada diente pasa por un sensor de ángulo de calado situado mirando a una periferia exterior del engranaje anular debido a la rotación del motor, el sensor de ángulo de calado detecta una longitud lateral del diente así como un intervalo de dos dientes adyacentes para calcular la relación entre ellos. Esto permite distinguir los dientes colocados a un paso regular desde la porción sin diente, detectando por ello la posición de referencia.
Sin embargo, dado que cada diente es detectado cuando pasa por el sensor de ángulo de calado con la rotación del motor, la velocidad inestable del motor puede producir una menor exactitud de la detección. Un motor de cuatro tiempos realiza dos rotaciones que completan un ciclo que consta de admisión, compresión, expansión y escape. En un ciclo descrito anteriormente, las fluctuaciones de la velocidad del motor repiten el aumento de la carrera de expansión, y luego la disminución gradual de las carreras de escape, admisión y compresión. En particular, volver a arrancar el motor después de haber estado en reposo da lugar a una mayor fluctuación de la velocidad rotacional del motor.
Una posición angular de cigüeñal se detecta detectando un saliente (longitud lateral del diente) y un rebaje (intervalo de dos dientes adyacentes) de cada diente dispuesto en el engranaje anular del cigüeñal, y distinguiendo la porción sin diente en base a la relación entre ellos. En este caso, la relación entre las longitudes laterales del saliente de diente y el rebaje varía dependiendo de las fluctuaciones de la velocidad rotacional del motor, que pueden dar lugar a determinación incorrecta de la porción sin diente, es decir, una posición de ángulo de calado de referencia. Esto requiere un tiempo adecuado para una determinación más fiable de la posición de ángulo de calado de referencia.
El documento US 4 553 427 describe un motor de dos cilindros con engranaje anular que tiene una porción de intervalo irregular formada por un diente ausente. La porción de intervalo irregular está dispuesta de manera que sea detectada cerca de una posición de punto muerto superior de un cilindro y al mismo tiempo está cerca de una posición de punto muerto inferior del otro cilindro. Se detecta un período entre bordes ascendentes de una señal de sensor de cigüeñal para derivar la posición de referencia.
El documento US 5 663 495 especifica problemas con una rotación no uniforme del motor (“condiciones operativas adversas”) . El engranaje anular usado es una disposición con diente ausente. El documento propone que una posición de marcador (intervalo irregular) corresponda a una posición de punto muerto superior. También propone que se pueda incorporar un marcador diametralmente opuesto. Relaciona este marcador opuesto con la posición de punto muerto superior de otro cilindro. Los cálculos para la determinación de la posición de ángulo de calado de referencia en este documento se dirigen a una identificación exacta con el marcador correspondiente a la posición de punto muerto superior.
El objeto de la presente invención realizada en vista de la técnica anterior descrita anteriormente es proporcionar un dispositivo detector de ángulo de calado para un motor independiente de las fluctuaciones de la velocidad rotacional del motor mientras realiza una detección más fiable de la posición de ángulo de calado de referencia.
Con el fin de lograr lo anterior, la presente invención proporciona un motor de tipo monocilindro que tiene un dispositivo detector de ángulo de calado, incluyendo: un engranaje anular fijado a un cigüeñal del motor monocilindro, donde el engranaje anular tiene múltiples salientes formados alrededor de su periferia exterior a intervalos iguales excepto en una posición donde falta un saliente, formando una porción de intervalo irregular, y un sensor de ángulo de calado capaz de detectar el inicio y el fin en ambos lados de cada saliente mientras el engranaje anular está girando con relación al sensor de ángulo de calado, donde el dispositivo detector de ángulo de calado detecta una longitud lateral (a) de cada saliente así como una longitud de intervalo (b) entre dos salientes adyacentes, y calcula una relación de un pulso de manivela entre la longitud lateral (a) de un saliente y la longitud de intervalo (b) para identificar la porción de intervalo irregular, donde el sensor de ángulo de calado está colocado con respecto a la porción de intervalo irregular de modo que uno de los salientes junto a la porción de intervalo irregular mire al sensor de ángulo de calado cuando el pistón del motor esté colocado en el punto muerto inferior.
Según esta disposición, la porción de intervalo irregular entre los salientes es detectada cuando el pistón está cerca del punto muerto inferior con las fluctuaciones más pequeñas de la velocidad rotacional del motor por ciclo. Esto proporciona una mayor fiabilidad al detectar la posición de ángulo de calado de referencia.
Según la disposición descrita anteriormente, cuanto mayor es la relación entre el saliente y el rebaje, mayor es la exactitud al detectar cada saliente. Además, la relación entre el saliente y el rebaje de una porción colocada a un paso regular difiere de forma significativa de la de la porción de intervalo irregular. Esto permite una mayor exactitud al detectar la porción de intervalo irregular incluso en el caso de fluctuaciones más grandes en la velocidad rotacional del motor. La relación, b/a (cuando a<b) o a/b (cuando a>b) , inferior a 2 puede producir una menor exactitud al distinguir entre el saliente y el rebaje. Sin embargo, una relación innecesariamente alta, b/a, o a/b también puede producir una menor exactitud de la detección del saliente. Por lo tanto, los valores, (a) y (b) , se determinan según sea apropiado dependiendo del tamaño del engranaje anular así como el número de salientes, y la exactitud del sensor.
Un ejemplo preferido de la disposición se caracteriza porque si la longitud lateral del diente y el intervalo de dos dientes adyacentes excluyendo la porción sin diente se designan como (a) y (b) respectivamente, cada diente se facilita de modo que b/a sea igual o mayor que 2.
Según la disposición descrita anteriormente, cuanto mayor es la relación entre el saliente y el rebaje de cada diente, mayor es la exactitud al detectar cada diente. Además, la relación entre el saliente y el rebaje de cada diente colocado a un paso regular difiere de forma significativa de la de la porción sin diente. Esto permite una mayor exactitud al detectar la porción sin diente incluso en el caso de fluctuaciones más grandes en la velocidad rotacional del motor. La relación, b/a, inferior a 2, puede producir menor exactitud al distinguir entre el saliente y el rebaje de cada diente. Sin embargo, una relación innecesariamente alta, b/a, también puede producir menor exactitud de la detección de los dientes. Por lo tanto, los valores, (a) y (b) , se determinan según sea apropiado dependiendo del tamaño del engranaje anular así como el número de dientes, y la exactitud del sensor.
Otras realizaciones de la invención son parte de las reivindicaciones dependientes.
Breve descripción de los dibujos La figura 1 es un diagrama de bloques de todo el sistema de control de una motocicleta según la presente invención.
La figura 2 es un diagrama esquemático de un aparato de detección de ángulo de calado para un motor según la presente invención.
La figura 3 es un gráfico que representa fluctuaciones en la velocidad rotacional del motor por ciclo.
La figura 4 es una vista explicativa del método de detectar dientes por el sensor de ángulo de calado de la presente invención.
La figura 5 es una vista explicativa que representa la colocación en el punto muerto superior según una... [Seguir leyendo]
Reivindicaciones:
1. Motor de tipo monocilindro que tiene un dispositivo detector de ángulo de calado, incluyendo:
un engranaje anular fijado a un cigüeñal del motor monocilindro, donde el engranaje anular tiene múltiples salientes (43) formados alrededor de su periferia exterior a intervalos iguales excepto en una posición donde falta un saliente, formando una porción de intervalo irregular (44) , y
un sensor de ángulo de calado (3) capaz de detectar el inicio y el fin en ambos lados de cada saliente mientras el
engranaje anular está girando con relación al sensor de ángulo de calado, donde el dispositivo detector de ángulo de calado detecta una longitud lateral (a) de cada saliente así como una longitud de intervalo (b) entre dos salientes adyacentes (43) , y calcula una relación de un pulso de manivela entre la longitud lateral (a) de un saliente y la longitud de intervalo (b) para identificar la porción de intervalo irregular (44) ,
donde el sensor de ángulo de calado (3) está colocado con respecto a la porción de intervalo irregular (44) de modo que uno de los salientes (43) junto a la porción de intervalo irregular (44) mire al sensor de ángulo de calado (3) cuando el pistón del motor esté colocado en el punto muerto inferior.
2. Motor según la reivindicación 1, caracterizado porque los salientes (43) están dispuestos en el engranaje anular
(42) de manera que una relación (b/a) entre la longitud de intervalo (b) de dos salientes adyacentes (43, 43) y la longitud lateral (a) de cada saliente (43) sea igual o mayor que un valor predeterminado, cuando a<b, o de modo que una relación (a/b) entre la longitud lateral (a) de cada saliente (43) y la longitud de intervalo (b) de dos salientes adyacentes (43, 43) sea igual o mayor que el valor predeterminado, cuando a>b.
3. Motor según la reivindicación 2, caracterizado porque el valor predeterminado es igual a 2 o mayor.
4. Motor según al menos una de las reivindicaciones 1 a 3, caracterizado porque doce porciones incluyendo once dientes (43) y una porción sin diente (44) están dispuestos en el engranaje anular (42) y porque el sensor de ángulo de calado (3) está configurado para generar once señales de pulso de una rotación de cigüeñal.
Patentes similares o relacionadas:
Rodamiento que comprende un captador de desplazamiento angular, del 17 de Junio de 2020, de HUTCHINSON: Rodamiento que comprende un casquillo de rodamiento y un captador inductivo de desplazamiento angular de dicho casquillo de rodamiento, comprendiendo […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Procedimiento y aparato para codificación magnética seccional continua para medición de par en ejes grandes, del 18 de Marzo de 2020, de GENERAL ELECTRIC COMPANY: Procedimiento para codificación de un eje , de acuerdo con la reivindicación 6, que comprende: (a) suministrar corriente a una primera posición […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Encoder de posición absoluta, del 28 de Agosto de 2019, de FAGOR AUTOMATION S.COOP: Encoder de posición absoluta, que comprende una regla graduada con una pista incremental y una pista absoluta , y una cabeza lectora que puede […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
 Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, del 26 de Junio de 2019, de ROTORK CONTROLS LIMITED: Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, incluyendo el aparato:
[…]
Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, del 26 de Junio de 2019, de ROTORK CONTROLS LIMITED: Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, incluyendo el aparato:
[…]