Aparato para situar placas de batería en una línea.
Aparato (16) para situar placas de batería en una línea a partir de una pila de placas que incluye unelevador (11) para recibir una pila de placas y para elevar secuencialmente la pila para mantener,
en uso, laplaca más alta en la pila en una región (15) de referencia situada entre dos planos paralelos generalmentehorizontales y una pluralidad de cabezas (26) de vacío dispuestas en un bucle cerrado para pasarsecuencialmente sobre el elevador (11) para recoger la placa más alta y para liberar posteriormente la placaen una posición de liberación, incluyendo el aparato (16) una cinta (25) horizontal sin fin, una cámara (28)de vacío colocada adyacente a la región de referencia para actuar en el sentido de elevar la placa más altadesde la pila y un motor (24) para hacer girar la cinta (25), caracterizado porque la cinta horizontal sin fintiene partes (26) perforadas espaciadas a lo largo de su longitud y que constituyen respectivas cabezas(26) de vacío y porque las partes perforadas están dispuestas para pasar secuencialmente sobre la cámara(28) de vacío, pasando las cabezas de vacío con una separación fija respecto del plano superior delintervalo de referencia.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08251050.
Solicitante: TBS ENGINEERING LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: Units 5-8, Lansdown Industrial Estate, Gloucester Road Cheltenham, Gloucestershire GL51 8PW REINO UNIDO.
Inventor/es: BARGE,CHRISTOPHER,S.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G21/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 21/00 Chasis o bastidores de soporte o de protección para transportadores sin fin o elementos de tracción de transportadores de correas o de cadenas. › Medios incorporados, fijados al armazón o a los bastidores, para guiar los portacargas, los elementos de tracción o las cargas portadas sobre las superficies móviles (disposiciones para el soporte de correas B65G 15/60; rodillos o instalaciones de rodillos B65G 39/00,).
- B65G59/04 B65G […] › B65G 59/00 Desapilado de objetos (B65G 60/00 tiene prioridad). › por aspiración o dispositivos magnéticos.
- B65H3/12 B65 […] › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 3/00 Sacado de artículos de las pilas (unión, colocación o agrupado de artículos B65H 39/00; máquinas para separar bandas superpuestas B65H 41/00; desapilado de material delgado combinado con el plegado B65H 45/26; combinaciones de operaciones de apilado y de sacado de artículos, presentando un interés distinto de la operación individual de apilado o de sacado B65H 83/00). › Bandas, correas o mesas aspirantes que se desplazan en relación a la pila.
PDF original: ES-2404885_T3.pdf
Fragmento de la descripción:
Aparato para situar placas de batería en una línea Esta invención se refiere a un aparato para situar placas de batería en una línea a partir de una pila de placas.
En la solicitud PCT/GB07/000835 en tramitación junto con la presente del solicitante se describe un aparato novedoso y particularmente rápido para situar placas de batería en una línea a partir de una pila de placas. La realización específica se basa en un carrusel de cabezas de vacío. El aparato funciona extremadamente bien, pero tiene una gran cantidad de componentes caros y requiere un control particularmente sofisticado.
El documento DE1923441 describe un mecanismo de transporte de placas de batería que tiene cabezas de succión desplazadas en una cinta sin fin, en línea con el preámbulo según la reivindicación 1.
La presente invención consiste en la parte característica según la reivindicación 1.
Este enfoque tiene numerosas ventajas. En primer lugar la cantidad de componentes se reduce significativamente, en particular porque la cámara de vacío no tiene que moverse; solo es necesario que se mueva la cinta sin fin. En segundo lugar la aplicación del vacío es estrictamente a lo largo del eje longitudinal de la pila, mientras que en la solicitud PCT mencionada anteriormente, el vacío se extiende sobre la placa. Convenientemente, el efecto aerodinámico de la cinta en movimiento es reducir la presión inmediatamente por encima de la placa y hacer que la placa más alta se separe de la pila, antes de que se aplique el vacío a medida que la parte perforada pasa sobre la cámara de vacío.
Convenientemente la cámara de vacío tiene una pared abierta o perforada sobre la que pasan las partes perforadas y, adicional o alternativamente, puede proporcionarse una válvula para determinar si la cámara de vacío está o no a una presión negativa.
Puede haber al menos dos elevadores espaciados en la dirección de desplazamiento de la cinta y una cámara de vacío puede estar asociada con cada elevador.
En una construcción particularmente conveniente, el aparato incluye un cuerpo alrededor del que discurre la cinta y el cuerpo define dos conjuntos de cámaras de vacío; incluyendo el primer conjunto la primera cámara o cámaras de vacío mencionadas e incluyendo un segundo conjunto una o más cámaras para proporcionar, con el primer conjunto, un recorrido continuo de vacío desde la región de referencia a la posición de liberación.
El segundo conjunto de cámaras de vacío puede proporcionar un vacío continuo y constante de modo que las placas se sujeten a la cinta a medida que se mueven a la posición de liberación. En la posición de liberación se prefiere que haya otra cámara de vacío conmutable, de modo que la placa pueda liberarse activamente, pero la posición de liberación podría formarse simplemente por la ausencia de una cámara de vacío en esa ubicación.
Aunque la invención se ha definido anteriormente, debe entenderse que incluye cualquier combinación inventiva de las características expuestas anteriormente o en la siguiente descripción.
La invención puede llevarse a cabo de varias formas y se describirá una realización específica, a modo de ejemplo, con referencia a los dibujos adjuntos en los que:
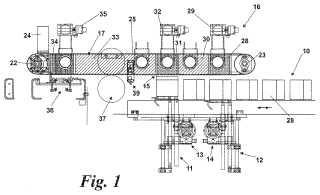
la figura 1 es una vista lateral, parcialmente en sección, del aparato para elevar placas;
la figura 2 es una vista en planta del aparato de la figura 1; Y
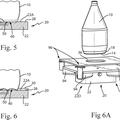
la figura 3 es un fragmento de sección a través de una de las cámaras de vacío.
Tal como puede verse de la mejor manera en la figura 1 un transportador, generalmente indicado con 10, alimenta pilas de placas, de derecha a izquierda, de modo que se capturan en uno u otro de los elevadores 11, 12.
Los elevadores 11, 12 se accionan por motores 13, 14 respectivos para elevar una pila respectiva del transportador 10 Y para elevar secuencialmente la pila de modo que la placa más alta en la pila se sitúa dentro de una región 15 de referencia. El control de los elevadores 11 y 12 es tal que, preferiblemente, solo una pila tiene una placa en la región de referencia en cada momento.
Una unidad de recogida y liberación se indica generalmente con 16. Ésta comprende un cuerpo 17 hueco metálico central que está dividido en varias cámaras de vacío unas al lado de otras, una de las cuales 18 se muestra de manera ilustrativa en la figura 3. Cada cámara 18 de vacío consiste en una cámara hueca con un fondo 19 perforado y una salida 20, que está conectada a una fuente 21 de vacío. Tal como se describirá en más detalle más abajo, para un primer conjunto de cámaras se prevé una válvula entre la cámara 18 y la fuente 21 de vacío de modo que la cámara 18 puede estar o no a una presión negativa. Un segundo conjunto de cámaras está constantemente conectado a la fuente 21 de vacío. El fondo 19 puede ser de cualquier forma adecuada de rejilla y de hecho, en teoría podría estar abierto, aunque esto crearía problemas potenciales al entrar partículas en el sistema de vacío y respecto de la estabilidad de la cinta como se indicará más abajo.
Tal como puede verse en la figura 1 el cuerpo 17 forma, efectivamente, una caja rectangular alargada. Se prevén ruedas 22, 23 dentadas en extremos respectivos del cuerpo 17 y la rueda 22 dentada puede accionarse por un motor 24. Una cinta 25 sin fin está montada alrededor del cuerpo 17 sobre las ruedas 22, 23 dentadas de modo que puede accionarse alrededor del cuerpo 17, desplazándose su lado inferior en un sentido de derecha a izquierda.
Tal como puede verse en la figura 2 la cinta 25 tiene una pluralidad de partes 26 perforadas espaciadas a lo largo de su longitud. El área de sección transversal de las partes 26 perforadas es sustancialmente similar a la sección transversal de una placa 27 del tipo mostrado en las pilas 28. Se entenderá que cuando una parte 26 perforada se alinea con un fondo 19 perforado de una cámara 18 de vacío la succión pasa a través de la cinta 25.
La disposición de cámaras 18 de vacío en el cuerpo 17, de derecha a izquierda, es como sigue:
(a) La cámara 28 es una cámara de recogida que tiene una válvula 29.
(b) La cámara 30 es una cámara de vacío constante
(c) La cámara 31 es una segunda cámara de recogida que tiene una válvula 32
(d) La cámara 33 es una cámara de vacío constante y
(e) La cámara 34 es una cámara de liberación que tiene una válvula 35.
La cámara 34 de liberación se sitúa por encima de un transportador 36 sobre el que van a liberarse las placas para formar una línea continua para pasar a una máquina de formación de grupos del tipo muy conocido para el experto en la técnica.
En el aparato también se muestra una estación 37 de cepillado de bornes, que prepara los bornes 38 en las placas 27 de batería para una operación de fundición en plomo posterior y un sensor 39 de doble placa para detectar si se han recogido dos placas por error.
En funcionamiento, el motor 24 hace girar la cinta 25 de modo que su lado inferior pasa de derecha a izquierda a lo largo de la parte inferior del cuerpo 17. Uno u otro de los elevadores 11, 12 sube su pila hasta que su placa más alta se sitúa dentro de la región 15 de referencia. En la figura 1 es el elevador 11 el que está en este estado. A medida que una parte 26 perforada se extiende más allá de la cámara 31 de vacío, la placa más alta se expone a la elevación vertical creada por el vacío en la cámara 31 y la placa se sujeta contra la cinta 25. Se retiene en esa posición por el vacío en la cámara 33 hasta que la parte 26 perforada alcanza la cámara 34. Cuando llega, la válvula 35 se cierra desconectando la fuente 21 de vacío y permitiendo que la placa 27 se deposite sobre el transportador
36.
Aunque en teoría es posible hacer funcionar el aparato sin el uso de las válvulas 29, 32 y 35, se prefiere hacerlas funcionar para poner su cámara en la posición operativa en el momento en el que hay una superposición completa entre la parte 26 perforada y el fondo 19, de modo que se produzca una elevación o deposición vertical precisa, en vez de un arrastre progresivo. A medida que la cinta 25 se desplaza muy próxima a la parte más alta de la pila, el aire arrastrado por la cinta se acelera a través de la separación causando una presión reducida sobre la placa más alta que actúa para separarla de la siguiente placa en la pila. Cuando la pila en el elevador 11 está casi agotada, el elevador 12 empieza a elevar su pila hacia la cámara 28 y sus placas 27 se recogerán por la cámara 28 adyacente. Éste es el estado que se ilustra realmente en la vista en planta de la figura 2 y se observará que las placas 27 son adyacentes... [Seguir leyendo]
Reivindicaciones:
1. Aparato (16) para situar placas de batería en una línea a partir de una pila de placas que incluye un elevador (11) para recibir una pila de placas y para elevar secuencialmente la pila para mantener, en uso, la placa más alta en la pila en una región (15) de referencia situada entre dos planos paralelos generalmente horizontales y una pluralidad de cabezas (26) de vacío dispuestas en un bucle cerrado para pasar secuencialmente sobre el elevador (11) para recoger la placa más alta y para liberar posteriormente la placa en una posición de liberación, incluyendo el aparato (16) una cinta (25) horizontal sin fin, una cámara (28) de vacío colocada adyacente a la región de referencia para actuar en el sentido de elevar la placa más alta desde la pila y un motor (24) para hacer girar la cinta (25) , caracterizado porque la cinta horizontal sin fin tiene partes (26) perforadas espaciadas a lo largo de su longitud y que constituyen respectivas cabezas
(26) de vacío y porque las partes perforadas están dispuestas para pasar secuencialmente sobre la cámara
(28) de vacío, pasando las cabezas de vacío con una separación fija respecto del plano superior del intervalo de referencia.
2. Aparato según la reivindicación 1, en el que la cámara (18) de vacío tiene una pared (19) abierta o perforada sobre la que pasan las partes (26) perforadas espaciadas.
3. Aparato según la reivindicación 2, que incluye además una válvula (29) para determinar si la cámara (28) de vacío está o no a una presión negativa.
4. Aparato según una cualquiera de las reivindicaciones anteriores, que incluye al menos dos elevadores (11, 12) espaciados en la dirección de desplazamiento de la cinta (25) y una cámara (28, 32) de vacío asociada con cada elevador (11, 12) .
5. Aparato según una cualquiera de las reivindicaciones anteriores, que incluye un cuerpo (17) alrededor del que discurren las cintas (25) , definiendo el cuerpo dos conjuntos de cámaras (28, 32) de vacío; incluyendo el primer conjunto la primera cámara o cámaras de vacío mencionadas e incluyendo el segundo conjunto una o más cámaras (30, 33) para proporcionar junto con el primer conjunto un recorrido continuo de vacío desde una región de referencia a la posición de liberación.
6. Aparato según una cualquiera de las reivindicaciones anteriores, que incluye además una cámara (34) de vacío conmutable en la posición de liberación.
VI
Fig. 1
....
N
1ft
N 1
....
N ....
Patentes similares o relacionadas:
 Soporte de vacío con junta de falda extensible, del 29 de Julio de 2020, de THE PROCTER & GAMBLE COMPANY: Un soporte de vacío que tiene una superficie de retención para soportar un artículo contra dicha superficie de retención mediante vacío, […]
Soporte de vacío con junta de falda extensible, del 29 de Julio de 2020, de THE PROCTER & GAMBLE COMPANY: Un soporte de vacío que tiene una superficie de retención para soportar un artículo contra dicha superficie de retención mediante vacío, […]
Aparato de transporte para una máquina de envasado de pasta alimenticia, productos granulares y similares, del 22 de Abril de 2020, de ALTOPACK S.P.A.: Aparato de transporte capaz de transportar horizontalmente una pluralidad de envases que contienen alimentos, que comprende una cadena de bucle cerrado que se […]
Dispositivo transportador así como instalación de transporte con el dispositivo transportador, del 12 de Febrero de 2020, de ASP Automation GmbH: Dispositivo transportador , con varios equipos de arrastre separados unos de otros para el transporte de al menos un material transportado (34a, b), estando configurados […]
Dispositivo de ventosas y transportador por aspiración con un dispositivo de ventosas de este tipo, del 9 de Octubre de 2019, de Putz, Stefan: Dispositivo de ventosas para un transportador por aspiración que comprende una ventosa para recoger un producto, en donde la ventosa define una cámara de aspiración […]
Sistema de transporte para transportar residuos de combustión u otros materiales sueltos, del 4 de Septiembre de 2019, de MAGALDI INDUSTRIE S.R.L.: Sistema de transporte para el transporte de residuos de combustión u otros materiales sueltos, que comprende: - una cinta transportadora , para transportar el material, […]
Dispositivo de inversión, del 14 de Agosto de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de inversión que comprenda: una unidad de alimentación que incluya una correa de alimentación que se desplaza continuamente […]
Aparato de transporte con correa de vacío, del 24 de Julio de 2019, de QUALYSENSE AG: Un aparato para transportar partículas , incluyendo el aparato: una correa transportadora sinfín que tiene una pluralidad de […]
Sistema de transporte para el transporte de al menos una pieza de trabajo, del 17 de Julio de 2019, de PHOENIX CONTACT GMBH & CO. KG: Sistema de transporte para el transporte de al menos una pieza de trabajo (W), con un dispositivo de transporte en el que la pieza […]