Un dispositivo de múltiples piezas de ligadura que tiene un miembro de refuerzo.
Un dispositivo (10) de múltiples piezas de ligadura o eslabones y dirigible,
que comprende:
un primer mecanismo (12) de múltiples piezas de ligadura;
caracterizado por que el dispositivo (10) de múltiples piezas de ligadura y dirigible comprende, de manera adicional:un segundo mecanismo (12) de múltiples piezas de pieza de ligadura o eslabones,
de tal manera que el segundo mecanismo (14) de múltiples piezas de ligadura rodea concéntricamente el primermecanismo (12) de múltiples piezas de ligadura, y de modo que el segundo mecanismo (14) de múltiples piezas deligadura comprende:
una primera pieza de ligadura (28, 124);
una pluralidad de piezas de ligadura intermedias (32, 128), de tal manera que una primera de las piezas de ligaduraintermedias (32, 128) está acoplada de forma movible a la primera pieza de ligadura (28, 124), de modo que lapluralidad de piezas de ligadura intermedias comprende una primera pluralidad de acanaladuras (174, 176, 178);una segunda pieza de ligadura (30, 126), acoplada de forma movible a una segunda de las piezas de ligaduraintermedias (32, 128); y
un miembro de refuerzo (302), de tal manera que el miembro de refuerzo (302) se extiende desde un primer extremode una tercera de las piezas de ligadura intermedias (32, 128) hacia un segundo extremo de la tercera de las piezasde ligadura intermedias (32, 128), de tal modo que el primer mecanismo (12) de múltiples piezas de ligaduracomprende una segunda pluralidad de acanaladuras (70, 72, 74), de tal manera que la primera pluralidad deacanaladuras (174, 176, 178) y la segunda pluralidad de acanaladuras (70, 72, 74) cooperan para definir al menosuna lumbrera de trabajo a lo largo de una longitud del dispositivo (10) de múltiples piezas de pieza de ligadura ydirigible.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/055156.
Solicitante: CARNEGIE MELLON UNIVERSITY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5000 FORBES AVENUE PITTSBURGH, PA 15213 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ZUBIATE,Brett, CHOSET,Howie.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Uniones.
PDF original: ES-2387589_T3.pdf
Fragmento de la descripción:
Un dispositivo de múltiples piezas de ligadura que tiene un miembro de refuerzo. ANTECEDENTES Esta Solicitud divulga una invención que se refiere, en general y en diversas realizaciones, a un dispositivo de
múltiples eslabones o piezas de ligadura y dirigible que tiene un miembro de refuerzo. El documento US 2006/0058582 divulga ciertos sistemas de bloqueo de forma desechables, compuestos por un cuerpo alargado que define una cavidad interna a través de la cual pueden hacerse avanzar instrumentos
endoscópicos. El cuerpo alargado puede colocarse bien en un estado rígido, bloqueado en su forma, o bien en un estado flexible, por el accionamiento de un conjunto de mango. SUMARIO Un dispositivo de múltiples eslabones o piezas de ligadura y dirigible puede incluir un primer mecanismo de múltiples
piezas de ligadura y un segundo mecanismo de múltiples piezas de ligadura. Al menos uno de entre el primer mecanismo de múltiples piezas de ligadura y el segundo mecanismo de múltiples piezas de ligadura puede incluir un primera pieza de ligadura, una pluralidad de piezas de ligadura intermedias, una segunda pieza de ligadura, acoplada de forma móvil con una segunda de las piezas de ligadura intermedias, y un miembro de refuerzo. Una primera de las piezas de ligadura intermedias puede ser acoplada de forma movible con la primera pieza de ligadura, y el miembro de refuerzo puede extenderse desde un primer extremo de una tercera de las piezas de ligadura intermedias hacia un segundo extremo de la tercera de las piezas de ligadura intermedias.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
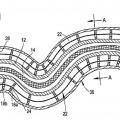
Se describen en la presente memoria diversas realizaciones de la invención, a modo de ejemplo, en combinación con las siguientes figuras. Las Figuras 1A y 1B ilustran diversas realizaciones de un dispositivo de múltiples eslabones o piezas de ligadura y
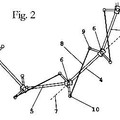
dirigible; La Figura 2 ilustra diversas realizaciones de un mecanismo de núcleo del dispositivo de la Figura 1; Las Figuras 3A-3C ilustran diversas realizaciones de una pieza de ligadura proximal, o más cercana, del mecanismo
de núcleo; Las Figuras 4A-4C ilustran diversas realizaciones de una pieza de ligadura intermedia del mecanismo de núcleo; Las Figuras 5A-5C ilustran diversas realizaciones de una pieza de ligadura distal, o más alejada, del mecanismo de
núcleo; La Figura 6 ilustra diversas realizaciones de un mecanismo de manguito del dispositivo de la Figura 1; Las Figuras 7A-7C ilustran diversas realizaciones de una pieza de ligadura proximal del mecanismo de manguito; Las Figuras 8A-8C ilustran diversas realizaciones de una pieza de ligadura intermedia del mecanismo de manguito; Las Figuras 9A-9D ilustran diversas realizaciones de una pieza de ligadura distal del mecanismo de manguito; La Figura 10 ilustra diversas realizaciones de una secuencia de movimiento del dispositivo de la Figura 1; La Figura 11 ilustra diversas realizaciones de un dispositivo de múltiples piezas de ligadura y dirigible que atraviesa
un camino o recorrido que tiene curvaturas acentuadas;
La Figura 12 ilustra diversas realizaciones de una porción de un dispositivo de múltiples piezas de ligadura y dirigible que tiene uno o más miembros de refuerzo; La Figura 13 ilustra un límite mecánico proporcionado a modo de ejemplo, de acuerdo con diversas realizaciones; La Figura 14 ilustra un límite mecánico proporcionado a modo de ejemplo, de acuerdo con diversas realizaciones. DESCRIPCIÓN DETALLADA Ha de comprenderse que al menos algunas de las figuras y descripciones de la invención se han simplificado para
concentrarse en elementos que son relevantes para una comprensión clara de la invención, al tiempo que se eliminan, para propósitos de claridad, otros elementos que las personas con conocimientos ordinarios de la técnica apreciarán que pueden comprender también una porción de la invención. Sin embargo, debido a que tales elementos son bien conocidos en la técnica, y debido a que no facilitan necesariamente una mejor comprensión de la invención, no se ha proporcionado en la presente memoria una descripción de tales elementos.
De acuerdo con diversas realizaciones, la invención que aquí se describe puede ser utilizada para controlar el movimiento de un dispositivo de múltiples eslabones o piezas de ligadura tal como el dispositivo de múltiples piezas de ligadura y dirigible que se describe en esta memoria. Para propósitos de facilidad de explicación, la invención se describirá en el contexto de su uso con diversas realizaciones del dispositivo de múltiples piezas de ligadura y dirigible que se describe en esta memoria. Sin embargo, un experto de la técnica apreciará que la invención puede ser utilizada con otros tipos de dispositivos de múltiples piezas de ligadura.
Las Figuras 1A y 1B ilustran diversas realizaciones de un dispositivo dirigible 10 de múltiples eslabones o piezas de ligadura. De acuerdo con las diversas realizaciones, el dispositivo de múltiples piezas de ligadura y dirigible puede ser un robot de tramos articulados, o de “serpiente”, un robot continuo o un dispositivo similar. Diversas realizaciones del dispositivo 10 pueden utilizarse para procedimientos médicos (como, por ejemplo, un taladro robótico, un dispositivo de colocación, una herramienta de ablación, un soporte de una cámara o de un instrumento, o un sistema de guiado para procedimientos mínimamente invasivos) , para aplicaciones de vigilancia o supervisión, para aplicaciones de inspección, para aplicaciones de búsqueda y rescate, etc. Para propósitos de claridad únicamente, se describirá más adelante en la presente memoria la utilidad del dispositivo 10 en el contexto de su aplicabilidad a procedimientos médicos. Sin embargo, una persona experta en la técnica apreciará que el dispositivo 10 puede ser utilizado en una variedad de aplicaciones diferentes.
El dispositivo 10 comprende un primer mecanismo 12 y un segundo mecanismo 14. De acuerdo con diversas realizaciones, un mecanismo puede ser un robot de tramos articulados, un robot continuo o un dispositivo similar. De acuerdo con diversas realizaciones, el segundo mecanismo 14 se ha estructurado y dispuesto para recibir y rodear el primer mecanismo 12, tal y como se muestra en la Figura 1B. De esta forma, el primer mecanismo y el segundo mecanismo pueden ser concéntricos. Para tales realizaciones, el primer mecanismo 12 puede considerarse el mecanismo interior o mecanismo de núcleo, y el segundo mecanismo 14 puede ser considerado el mecanismo exterior o mecanismo de manguito. De acuerdo con otras realizaciones, los primer y segundo mecanismos 12, 14 pueden haberse estructurado y dispuesto de manera que tengan una relación distinta de una relación concéntrica. Por ejemplo, un experto de la técnica apreciará que, de acuerdo con diversas realizaciones, los primer y segundo mecanismos 12, 14 pueden haberse estructurado y dispuesto para operar en una disposición lado con lado, de tal manera que el primer mecanismo 12 opera en posición adyacente al segundo mecanismo 14. De acuerdo con diversas realizaciones, es posible utilizar configuraciones adicionales y/o alternativas dentro del ámbito de esta invención. De acuerdo con diversas realizaciones, puede proporcionarse un espacio tridimensional 240 entre los primer y segundo mecanismos. Este espacio se describirá con mayor detalle más adelante.
Tal y como se describe con mayor detalle más adelante en la presente memoria, el primer mecanismo 12 puede funcionar en un modo rígido o en un modo flojo o flexible, el segundo mecanismo 14 puede funcionar, bien en un modo rígido o bien en un modo flojo o flexible, y los primer y segundo mecanismos 12, 14 pueden funcionar independientemente uno de otro. Tanto el primer mecanismo 12 como el segundo mecanismo 14 pueden ser mecanismos dirigibles. De acuerdo con ello, se apreciará que el dispositivo 10 puede ser utilizado para explorar o desplazarse por un espacio de cavidad interna así como para efectuar cualquier recorrido tridimensional dentro del espacio interior a una cavidad. De acuerdo con diversas realizaciones, el dispositivo 10 puede avanzar mediante la alternación del funcionamiento del primer mecanismo 12 y del segundo mecanismo 14 entre un modo flojo o flexible y un modo rígido.
De acuerdo con diversas realizaciones, el dispositivo 10 puede comprender también uno o más cables. De acuerdo con diversas realizaciones, uno o más de los cables pueden ser cables de dirección y/o cables tensores. Por ejemplo, el dispositivo puede incluir... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo (10) de múltiples piezas de ligadura o eslabones y dirigible, que comprende:
un primer mecanismo (12) de múltiples piezas de ligadura;
caracterizado por que el dispositivo (10) de múltiples piezas de ligadura y dirigible comprende, de manera adicional:
un segundo mecanismo (12) de múltiples piezas de pieza de ligadura o eslabones,
de tal manera que el segundo mecanismo (14) de múltiples piezas de ligadura rodea concéntricamente el primer mecanismo (12) de múltiples piezas de ligadura, y de modo que el segundo mecanismo (14) de múltiples piezas de ligadura comprende:
una primera pieza de ligadura (28, 124) ;
una pluralidad de piezas de ligadura intermedias (32, 128) , de tal manera que una primera de las piezas de ligadura intermedias (32, 128) está acoplada de forma movible a la primera pieza de ligadura (28, 124) , de modo que la pluralidad de piezas de ligadura intermedias comprende una primera pluralidad de acanaladuras (174, 176, 178) ;
una segunda pieza de ligadura (30, 126) , acoplada de forma movible a una segunda de las piezas de ligadura intermedias (32, 128) ; y
un miembro de refuerzo (302) , de tal manera que el miembro de refuerzo (302) se extiende desde un primer extremo de una tercera de las piezas de ligadura intermedias (32, 128) hacia un segundo extremo de la tercera de las piezas de ligadura intermedias (32, 128) , de tal modo que el primer mecanismo (12) de múltiples piezas de ligadura comprende una segunda pluralidad de acanaladuras (70, 72, 74) , de tal manera que la primera pluralidad de acanaladuras (174, 176, 178) y la segunda pluralidad de acanaladuras (70, 72, 74) cooperan para definir al menos una lumbrera de trabajo a lo largo de una longitud del dispositivo (10) de múltiples piezas de pieza de ligadura y dirigible.
2. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (302) está conectado o unido a una primera superficie de la tercera de las piezas de ligadura intermedias (32, 128) .
3. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (302) se ha formado integral o de una pieza con la tercera de las piezas de ligadura intermedias (32, 128) .
4. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual la primera pieza de ligadura (28, 124) comprende uno o más miembros de refuerzo (302) .
5. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual la segunda pieza de ligadura (30, 126) comprende uno o más miembros de refuerzo (302) .
6. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (302) comprende un collar de metal.
7. El dispositivo (10) de acuerdo con la reivindicación 6, en el cual un espesor de pared asociado con el miembro de refuerzo (302) es tal, que el miembro de refuerzo (302) se interpone o interfiere con un intervalo de movimiento asociado con una o más piezas de ligadura adyacentes.
8. El dispositivo (10) de acuerdo con la reivindicación 6, en el cual una longitud o dimensión en sentido longitudinal asociada con el miembro de refuerzo (302) es tal, que el miembro de refuerzo (302) interfiere con un intervalo de movimiento asociado con una o más piezas de ligadura adyacentes.
9. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (302) rodea al menos el diez por ciento de un área superficial de una primera superficie de la tercera de las piezas de ligadura intermedias (32, 128) .
10. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (3029 está compuesto por al menos uno de los siguientes:
un material termoplástico polimérico;
un metal;
una fibra; y una malla.
11. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual al menos uno de entre el primer mecanismo
(12) de múltiples piezas de ligadura y el segundo mecanismo (14) de múltiples piezas de ligadura comprende una pluralidad de miembros de refuerzo (302) .
12. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (302) es un miembro de refuerzo circunferencial.
13. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el primer mecanismo (12) de múltiples piezas de ligadura y el segundo mecanismo (14) de múltiples piezas de ligadura comprenden:
un primer eslabón o pieza de ligadura (28, 124) ;
una pluralidad de eslabones o piezas de ligadura intermedias (32, 128) , en la que una primera de las piezas de ligadura intermedias (32, 128) está acoplada de forma movible a la primera pieza de ligadura (28, 124) ;
un segundo eslabón o pieza de ligadura (30, 126) , acoplado de forma movible a una segunda de las piezas de ligadura intermedias (32, 128) ; y
un miembro de refuerzo (302) , de tal manera que el miembro de refuerzo (302) se extiende desde un primer extremo 15 de una tercera de las piezas de ligadura intermedias (32, 128) hacia un segundo extremo de la tercera de las piezas de ligadura intermedias (32, 128) .
14. El dispositivo (10) de acuerdo con la reivindicación 1, en el cual el miembro de refuerzo (302) se ha configurado para reducir los esfuerzos experimentados por uno o más de: la primera pieza de ligadura (28, 124) , al menos una de la pluralidad de piezas de ligadura intermedias (32, 128) y la segunda pieza de ligadura (30, 126) , cuando se
aplica una fuerza a un cable del dispositivo (10) , al limitar mecánicamente el intervalo de movimiento de las piezas de ligadura adyacentes.
Patentes similares o relacionadas:
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Disposición articulada con al menos un eje accionado, del 26 de Abril de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Disposición articulada con al menos un eje accionado, en particular para activar un movimiento de un componente de un robot, - en donde al menos […]
Aparato de posicionamiento para uso biomédico, del 20 de Febrero de 2019, de CONMED CORPORATION: Aparato de posicionamiento médico para posicionar y sostener un objeto, que comprende: un componente telescópico que se extiende […]
Dispositivo de posicionamiento previo y de fijación amovible de miembros articulados de un robot humanoide, del 12 de Abril de 2017, de Softbank Robotics Europe: Robot móvil que comprende un tronco y varios miembros conectados al tronco de manera amovible, caracterizado porque comprende: […]
 Una herramienta flexible, del 29 de Julio de 2015, de ROLLS-ROYCE PLC: Una herramienta flexible , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y
medios rígidos, que comprenden un medio […]
Una herramienta flexible, del 29 de Julio de 2015, de ROLLS-ROYCE PLC: Una herramienta flexible , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y
medios rígidos, que comprenden un medio […]
 BRAZO POLIARTICULADO, del 19 de Abril de 2012, de PEPIOL ESPALLARGAS, FRANCISCO ANDRES: Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo […]
BRAZO POLIARTICULADO, del 19 de Abril de 2012, de PEPIOL ESPALLARGAS, FRANCISCO ANDRES: Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo […]
MAQUINA DE REVESTIMIENTO CON UN PULVERIZADOR Y UNA ARTICULACION GIRATORIA., del 16 de Octubre de 2005, de DURR SYSTEMS GMBH: Máquina de revestimiento para el revestimiento en serie electrostático de piezas de trabajo con un pulverizador el cual para la carga del material […]
 MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA, del 7 de Febrero de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo: […]
MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA, del 7 de Febrero de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo: […]