Dispositivo guiador dirigible.
Una sonda articulada (10) que comprende:
un primer mecanismo (12,
14) compuesto por una pluralidad de eslabones:
un segundo mecanismo (12, 14) compuesto por una pluralidad de eslabones;
un primer cable (59) que se extiende a través de dicha pluralidad de eslabones de dicho primer mecanismo(12, 14) o dicha pluralidad de eslabones de dicho segundo mecanismo (12, 14) y una pluralidad de cables(54, 55, 56) que discurre a través de la otra de dicha pluralidad de eslabones de dicho primer mecanismo (12,14) o dicha pluralidad de eslabones de dicho segundo mecanismo (12, 14);
un dispositivo para producir señales de instrucciones; y
un alimentador electromecánico (16) sensible a dichas señales de instrucciones, siendo dicho alimentadorelectromecánico (16) capaz de alternar cada uno de dicho primer mecanismo (12) y segundo mecanismo (14)entre un modo flácido y un modo rígido, y que comprende:
un primer carro móvil (42), siendo uno de dicho primer mecanismo o dicho segundo mecanismosensible a dicho primer carro;
un segundo carro móvil (44), siendo el otro de dicho primer mecanismo o dicho segundo mecanismosensible a dicho segundo carro;
un primer actuador (48) para controlar la posición de dicho primer carro (42); y
un segundo actuador (46) para controlar la posición de dicho segundo carro (44)..
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/022442.
Solicitante: CARNEGIE MELLON UNIVERSITY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: Center for Technology Transfer and Enterprise, Creation, 5000 Forbes Avenue Pittsburgh Pennsylvania 15213 ESTADOS UNIDOS DE AMERICA.
Inventor/es: CHOSET,Howie, WOLF,ALON, ZENATI,MARCO A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47C20/04 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47C SILLAS (asientos especialmente concebidos para los vehículos B60N 2/00 ); SOFAS; CAMAS (capitonado en general B68G). › A47C 20/00 Apoyacabezas, reposapiés u otros elementos de apoyo para las camas, sofás o similares (caballetes de lectura o mesas para cama A47B 23/00; soportes destinados a las camas y especialmente concebidos para cuidar enfermos A61G 7/065). › con inclinación regulable (A47C 20/08 tiene prioridad).
PDF original: ES-2433664_T3.pdf
Fragmento de la descripción:
Dispositivo guiador dirigible Antecedentes La presente invención se refiere a una extensión perteneciente al campo de los robots para el campo de los mecanismos teleoperados y, más concretamente, los dispositivos dirigibles, flexibles, de tres dimensiones.
Aunque hay muchas aplicaciones para este dispositivo descrito, la aplicación que motiva este dispositivo es la cirugía mínimamente invasiva. Hay pocos sistemas robóticos médicos disponibles en el mercado actual. Estos sistemas se pueden clasificar en tres grupos principales: sistemas robóticos activos, semiactivos y pasivos. El sistema robótico activo está representado por Kazanzides et al. [Kazanzides P, Mittelstadt B, Musits B, Barger W, Zuhars J, Williamson B, Cain P and Carbone E: An integrated system for cementless hip replacement. IEEE Engineering in Medicine and Biology, pp. 307-313, 1995] y Brandt et al. [Brandt G, Radermacher K, Lavalle S, Staudte H. W, Rau G, “A Compact Robot for Image Guided Orthopedic Surger y : Concept and Preliminar y Results”, Lecture notes in Computer Science 1205, CVRMed-MRCAS´97, Troccaz J, Grmson R, and Mosges R, eds, pp 767776, 1997], en donde, en el primer ejemplo, un robot en serie sierra activamente el fémur para fijar óptimamente un implante para una cirugía de rodilla. Este robot es un mecanismo de tipo en serie con un gran volumen de trabajo con relación a las tareas hechas a mano. Por lo tanto, tales robots son algo torpes y pesados, y adolecen de varias desventajas conocidas que incluyen rigidez un precisión relativamente bajas, y una relación carga/peso nominal baja. El hecho de que estos robots sean utilizados en procedimiento médicos, en donde la precisión y la seguridad son primordiales, ha motivado que los investigadores busquen manipuladores con mejores rendimiento cinemático y dinámico para las actividades quirúrgicas especificas.
En el segundo ejemplo, una plataforma de Stewart se utiliza en la cirugía de sustitución de cadera. Una plataforma de Stewart es un tipo de robot paralelo. Un robot paralelo de seis grados de libertad está compuesto de dos plataformas rígidas, una utilizada como plataforma base y la otra como un efectuador de extremo móvil. Las dos plataformas están conectadas mediante juntas de bola y receptáculo a seis eslabones capaces de cambiar su longitud. Controlado la longitud de cada eslabón, el mecanismo puede posicionar y orientar el efectuador de extremo móvil con relación a la plataforma base. Las ventajas de las estructuras robóticas paralelas incluyen: peso bajo, estructura compacta, alta precisión, alta rigidez, espacio de trabajo restringido, respuesta de alta frecuencia y bajo coste [Merlet J. P., Les Robots Paralleles, Hermes, Paris, 1997]. Además, los robots paralelos son significativamente más robustos al fallo que los dispositivos en serie debido a que en un dispositivo en serie, un fallo puede hacer que el robot se mueva dramáticamente, mientras que el una estructura paralela, un fallo tendrá un efecto pequeño en el movimiento total del robot. Esto es importante en aplicaciones médicas ya que los cirujanos quieren un dispositivo que mantenga su última posición en caso de fallo catastrófico. [Khodabandehloo K., Brett P.N., Buckingham R.O, “Special-Purpose Actuators and Architectures for Surger y Robots”, Computer Integrated Surger y , Taylor R, Lavalle S, Burdea G., Ralph Mosges, eds, pp. 263-274, 1996].
Desde una perspectiva robótica, la principal desventaja de los mecanismos paralelos es si limitado espacio de trabajo. Sin embargo, como han señalado Khodabandehloo et al., el espacio de trabajo limitado es una ventaja en aplicaciones médicas porque los volúmenes de operación in situ activos son limitados para proteger la paciente y al médico. Desafortunadamente, esta ventaja fuerza al robot a des desplegado cerca de la zona de operación en la sala de operaciones, lo que a menudo es poco realista debido a que el robot interferiría con los cirujanos. Una de las soluciones introducidas para resolver este problema es unir todo el sistema robótico al techo de la sala de operaciones de manera que el robot trabaje “al revés” [Lueth T., Bier J., “Robot Assisted Intervention in Surger y ”,
Gilsbach J.M and Stiel H.S. (Editors) . Neuronavigation-Neurosurgical and Computer Scientific Aspects, Springer-Verlag, Wien, 1999]. De este modo, el robot no interfiere durante el procedimiento de funcionamiento estándar, y es activado y maniobrado en el área de operación cuando se requiere. Sin embargo, esta solución no es aplicable en todas las salas de operaciones y requiere un diseño espacial de la sala de operaciones.
El robot de diseño conocido introducido en la sala de operaciones fue el sistema Robodoc® (Integrated surgical Systems, Sacramento, CA) . Este sistema se utilizó para perforar la cavidad medular del fémur para una prótesis femoral sin cemento. Otros sistemas robóticos introducidos en el mercado son los URS®, para la colocación de una endoscopia de una forma libre de temblores y más precisa, es decir con una precisión de hasta 1/100 mm. EndoAssist®, utilizado para soporte de cámara, EndoWrist®, utilizado para soporte de instrumentos, CASPAR®, utilizado para sustitución de cadera, AESOP®, utilizado para soporte de cámaras, y ZEUS®, para soporte de instrumentos. Otros sistemas robóticos médico disponibles son el Neuromate®, utilizado para el guiado de endoscopio/catéter, el MKM®, utilizado para soporte de microscopio, y el SurgiScope®, utilizado también para soporte de microscopio.
El sistema robótico semiactivo está representado por Ho et al. [Ho SC, Hibberd RD, Davies BL, “Robot Assisted Knee Surger y ”, IEEE Engeneering in Medicine and Biology, Vol. 14, pp 292-299, Mayo/Junio 1995], Kienzle et al. [Kienze III, T, Stullberg D., Peshkin M., Quaid A., Lea J., Goswami A., Wu Ch., “A Computer-Assisted Total Knee Peplacement Surgical System Using a Calibrated Robot”, In Computer integrated surger y . Taylor, Lavallee, Burdea
and Mosges, eds, MIT Press, pp. 410-416, 1996] y Harris et al. [Harris SJ., Lin WJ, Fan KL, Hibberd RD, Cobb J, Middelton R, Davies BL, “Experiences with Robotic Systems for Knee Surger y ”, Lecture notes in computer science 1205, CVRMed-MRCASD ´97]. En Kienzle et al, el robot actúa como un asistente durante la operación sujetando una herramienta en una posición estable, guiando de forma precisa una herramienta de corte, y evitando que la herramienta se salga de la región operativa deseada. Un tercer enfoque, los sistemas robóticos pasivos, está representado en Grace et al. [Grace K.W., Colgate J.E., Gluskberg M.R., Chun J.H., “Six Degree of Freedom Micromanipulator for Ophthalmic Surger y ”, IEEE International Conference on Robotics and Automation, pp 630-635, 1993], y Jensen et al. [Jensen P.S., Glusksberg M.R., Colgate J.E., Grace K.W., Attariwala R., “Robotic Micromanipulator for Orthopedic Surger y ”, 1st International Symposium on Medical Robotics and Computer Assisted surger y , pp. 204.210, Pittsburg 22-24, 1994] en el que un robot de seis grados de libertad actúa simplemente como una herramienta guiada, controlada totalmente por el cirujano.
La tercera categoría de robots médicos es el sistema pasivo. Este tipo de sistema robótico soporte el procedimiento quirúrgico, pero no toma parte activa durante la cirugía, en otras palabras: el cirujano tiene el control total del proceso de cirugía en todo momento. También hay unos pocos sistemas robóticos que están incluidos dentro de esta categoría. Matsn et. al. [Matsen FA III, Garbino JL, Sidles JA, Prat B, Baumgarten D, Kaiura R, Robotic assistance in Orthopedic surger y , Clin Orthp and Rela Res 296, 1993: 178-186.] informa sobre un sistema robótico pasivo para artroplastia de rodilla. Para su desarrollo utilizaron una Unimation comercial PUMA 260, que mantenía una plantilla transparente tridimensional que era capaz de que el cirujano indicase la posición deseada de la superficie de la junta prostética. El robot coloca después la guía de sierra de tal manera que el plano de corte resultante está de acuerdo con el indicado por el cirujano, que es realmente el que sujeta la sierra eléctrica y realiza los cortes. Este sistema nunca se utilizo en la sala de operaciones.
McEwen et al. [McEwen C, Bussani CR, Auchinleck GF, Breault MJ. Development and initial clinical evaluation o pre robotic and robotic retraction systems for surger y . 2nd Annual Int Symposium Custom Orthopedic Prosthetics, Chicago, Octubre 1989] utilizan un Arthrobot como ayudante en la sala de operaciones. El robot está accionado neumáticamente, es un dispositivo posicionador controlado electrónicamente que se utiliza intraoperativamente para sujetar una... [Seguir leyendo]
Reivindicaciones:
1. Una sonda articulada (10) que comprende:
un primer mecanismo (12, 14) compuesto por una pluralidad de eslabones: un segundo mecanismo (12, 14) compuesto por una pluralidad de eslabones; un primer cable (59) que se extiende a través de dicha pluralidad de eslabones de dicho primer mecanismo (12, 14) o dicha pluralidad de eslabones de dicho segundo mecanismo (12, 14) y una pluralidad de cables (54, 55, 56) que discurre a través de la otra de dicha pluralidad de eslabones de dicho primer mecanismo (12, 14) o dicha pluralidad de eslabones de dicho segundo mecanismo (12, 14) ; un dispositivo para producir señales de instrucciones; y un alimentador electromecánico (16) sensible a dichas señales de instrucciones, siendo dicho alimentador electromecánico (16) capaz de alternar cada uno de dicho primer mecanismo (12) y segundo mecanismo (14) entre un modo flácido y un modo rígido, y que comprende:
un primer carro móvil (42) , siendo uno de dicho primer mecanismo o dicho segundo mecanismo sensible a dicho primer carro; un segundo carro móvil (44) , siendo el otro de dicho primer mecanismo o dicho segundo mecanismo sensible a dicho segundo carro; un primer actuador (48) para controlar la posición de dicho primer carro (42) ; y un segundo actuador (46) para controlar la posición de dicho segundo carro (44) .
2. La sonda (10) de la reivindicación 1, en la que dicho mecanismo alimentador comprende:
un primer mecanismo de tensión portado por dicho primer carro para controlar la tensión de dicho primer cable (59) ; y una pluralidad de mecanismos de tensión portada por dicho segundo carro para controlar la tensión de dicha pluralidad de cables (54, 55, 56) .
3. La sonda (10) de la reivindicación 2, en la que dicho primer mecanismo de tensión, dicha pluralidad de mecanismos de tensión, dicho primer actuador (48) y dicho segundo actuador (46) cada uno comprende un motor.
4. La sonda (10) de la reivindicación 1, en la que dichos eslabones son seleccionados a partir de un grupo que consta de eslabones con forma de hueso y columna vertebral.
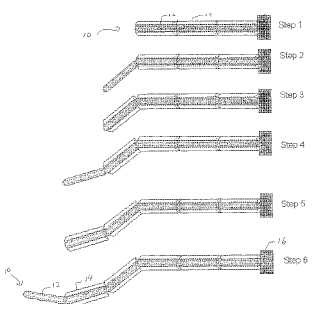
5. Un método para operar una sonda articulada que tiene un núcleo interno (12) y un manguito exterior (14) cada uno sensible a un carro, y en donde uno de dicho núcleo interno (12) o manguito externo (14) empieza en un estado rígido y el otro en una estado flácido, comprendiendo el método las etapas de:
hacer avanzar un carro al que es sensible la estructura flácida una distancia predeterminada; hacer rígida la estructura flácida utilizando un primer mecanismo de tensionamiento y la estructura rígida flácida utilizando un segundo mecanismo de tensionamiento; y repetir el proceso hasta que el extremo distal de la sonda (10) este colocado en una posición deseada, y en donde al menos uno del núcleo interno (12) y el núcleo externo (14) es dirigible cuando está en el estado flácido; en el que el método no se realiza dentro del cuerpo humano o animal.
6. El método de la reivindicación 5, en el que el núcleo interno (12) es dirigible, y en el que dicho avance incluye avanzar dicho núcleo interno (12) la longitud de un eslabón de dicho núcleo (12) más allá de un extremo distal de dicho manguito (14) , y en donde dicho avance adicional incluye avanzar dicho manguito exterior (14) de manera que el extremo distal es coextensivo con el extremo distal de dicho núcleo interno (12) .
7. El método de la reivindicación 5, en el que dicho manguito exterior (14) es dirigible, y en el que dicho avance incluye avanzar dicho manguito exterior (14) la longitud de un eslabón de dicho manguito exterior (14) más allá de un extremo distal de dicho núcleo interno (12) , y en donde dicho avance adicional incluye avanzar dicho núcleo interno (12) de manera que su extremo distal es coextensivo con el extremo distal de dicho manguito exterior (14) .
8. El método de la reivindicación 5, en el que dicho núcleo interno (13) y dicho manguito externo (14) son dirigibles, y en el que dicho avance incluye avanzar dicho núcleo interno (12) la longitud de un eslabón de dicho núcleo interno (12) más allá de un extremo distal de dicho manguito externo (14) , y en el que dicho avance incluye avanzar dicho manguito exterior (14) la longitud de un eslabón de dicho manguito exterior (14) más allá de un extremo distal de dicho núcleo interno (12) .
9. El método de la reivindicación 5, que adicionalmente comprende las etapas de:
generar imágenes procedentes de un dispositivo montado en el extremo de dicha sonda a medida que dicha sonda se mueve dentro de un espacio de tres dimensiones; y utilizar las imágenes para controlar el movimiento de dicha sonda (10) .
10. El método de la reivindicación 9, en el que dicha generación de imágenes comprende generar imágenes con bien con una cámara o bien con una lente.
11. El método de la reivindicación 5, que adicionalmente comprende las etapas de:
generar imágenes de un espacio de tres dimensiones, incluyendo dichas imágenes al menos la posición del extremo distal de dicha sonda; y utilizar las imágenes para controlar el movimiento de dicha sonda.
12. El método de la reivindicación 11, en el que dichas imágenes son generadas utilizando un o bien MRI, o bien 15 sonido, o bien ultrasonido, o radiación.
13. El método de la reivindicación 11, en el que dicho uso de imágenes para controlar el movimiento de dicha sonda se realiza en tiempo real.
14. La sonda (10) de la reivindicación 1, en la que dicho primer mecanismo (12, 14) está situado a lo largo de dicho segundo mecanismo (12, 14) , incluyendo un de dicho primer y segundo mecanismos miembros para mantener una relación separada entre dicho primer y dicho segundo mecanismos.
15. La sonda (10) de la reivindicación 1, en la que dicho dispositivo para producir señales de instrucciones produce señales de instrucciones para hacer que uno del primer y segundo mecanismos sea flácido mientras que el otro de dichos mecanismos sea rígido para hacer posible que el mecanismo flácido avance utilizando dicho mecanismo rígido como guía por lo que se preserva la configuración de la sonda.
16. La sonda (10) de la reivindicación 2, que adicionalmente comprende una pluralidad de codificadores de eje,
siendo cada uno de dicho primer mecanismo de tensión y dicha pluralidad de mecanismos de tensión sensibles a una de dicha pluralidad de codificadores de eje.
17. La sonda (10) de la reivindicación 1, en la que dicho dispositivo para producir señales de instrucciones produce señales de instrucciones referenciadas a una posición de referencia.
18. La sonda (10) de la reivindicación 1, en la que cada eslabón es capaz de girar en la cabeza de eslabón adyacente, actuando como una articulación esférica con aproximadamente 14º de rango de movimiento en cualquier dirección.
19. La sonda (10) de la reivindicación 1, en la que uno de dicho primer mecanismo o de dicho segundo mecanismo porta una cámara en un extremo distal del mismo.
20. La sonda (10) de la reivindicación 1, en la que cada uno de dicho primer mecanismo o dicho segundo mecanismo porta una cámara en un extremo distal del mismo, y en la que cada uno de dicho primer mecanismo y 45 dicho segundo mecanismo es dirigible.
21. La sonda (10) de la reivindicación 1, en la que dichos eslabones son cilíndricos.
22. La sonda (10) de la reivindicación 21, en la que dicho primer mecanismo está situado dentro de dicho segundo 50 mecanismo.
Patentes similares o relacionadas:
 Cama eléctrica, del 29 de Julio de 2020, de Keeson Technology Corporation Limited: Una cama eléctrica, que comprende:
una estructura de cama;
una pluralidad de láminas de cama, en que, al menos, una lámina de la cama de […]
Cama eléctrica, del 29 de Julio de 2020, de Keeson Technology Corporation Limited: Una cama eléctrica, que comprende:
una estructura de cama;
una pluralidad de láminas de cama, en que, al menos, una lámina de la cama de […]
Somier de lamas con un accionamiento de mueble impulsado por motor eléctrico, del 22 de Julio de 2020, de DEWERTOKIN TECHNOLOGY GROUP CO., LTD: Somier de lamas ajustable por motor eléctrico, que comprende superficies de apoyo de un acolchado o colchón regulables entre sí y/o componentes […]
Cama eléctrica, del 8 de Julio de 2020, de Keeson Technology Corporation Limited: Una cama eléctrica, que comprende una estructura de cama, una pluralidad de láminas de cama, un dispositivo de despertador, un reloj y una caja de control […]
Cama articulada con soporte lumbar articulado ajustable, del 1 de Julio de 2020, de Ergomotion, Inc: Un mecanismo de ajuste de soporte lumbar para una cama articulada que comprende: un primer accionador unido de manera pivotante a una sección […]
Mueble versátil, del 1 de Julio de 2020, de HSIGN S.r.l: Un mueble motorizado , configurado para adoptar una serie de configuraciones diferentes, en las que se convierte en un taburete, una silla, un sofá, una tumbona u otro, […]
Tumbona regulable eléctricamente alimentada por energía solar, del 17 de Junio de 2020, de Schaffner AG: Tumbona regulable eléctricamente, con un bastidor y una superficie para tumbarse una persona fijada al bastidor, en donde el bastidor presenta unos […]
Mueble convertible, del 27 de Mayo de 2020, de HSIGN S.r.l: Mueble convertible, configurado para ser transformado de silla en sofá (1'), y viceversa, cuyo mueble comprende: - un cuerpo principal […]
Accionamiento electromotriz de un mueble, del 6 de Mayo de 2020, de DewertOkin GmbH (100.0%): Accionamiento electromotriz de un mueble para un mueble reclinable o un mueble de asiento con un riel de guía y una unidad de eje de salida que se mueve […]