Sistema de localización zonal de alta capacidad por ultrasonidos.
Un sistema de localización zonal dispuesto para determinar en qué zona de un conjuntopredeterminado de zonas (Z1,
Z2, Z3), tales como habitaciones, está presente una etiqueta de controlportátil (PT), incluyendo dicho sistema,
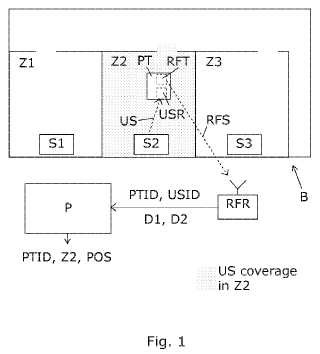
- Un conjunto de transmisores de ultrasonidos (S1, S2, S3) ubicado en zonas respectivas delconjunto predeterminado de zonas (Z1, Z2, Z3), en el que los transmisores de ultrasonidos(S1, S2, S3) están dispuestos para generar una señal de ultrasonido (US), tal como una señaltransmitida en operaciones intermitentes de ultrasonidos.
- Una etiqueta de control portátil (PT) con un código asociado de identificación (PTID),incluyendo la etiqueta de control portátil (PT)
- Un receptor de ultrasonidos (USR) dispuesto para recibir la señal de ultrasonido (US),
- Medios de procesamiento de la señal (SP), dispuestos para
- Medir una intensidad de la señal de ultrasonido recibida (US) y para generar un primer valorde datos (D1) basado en dicha intensidad, y
- Para medir un parámetro de efecto Doppler basado en la señal recibida de ultrasonido (US) ypara generar un segundo valor de datos (D2) basado en dicho parámetro de efecto Doppler, y
- Un transmisor de Radio Frecuencia (RFT) dispuesto para transmitir una señal de RadioFrecuencia (RFS) con datos que representan el código de identificación (PTID), y los primerosy segundos valores de datos (D1, D2),
- Una emisora de Radio Frecuencia (RS) dispuesta para recibir la señal de Radio Frecuencia(RFS) de la etiqueta de control portátil (PT), y
- Un procesador (P) conectado, de forma operativa, a la emisora de Radio Frecuencia (RS),estando dispuesto el procesador (P) para
- Identificar la etiqueta de control portátil (PT) basada en el código de identificación (PTID),
- Para determinar en qué zona (Z2) está presente la etiqueta de control portátil (PT), basándoseen la detección de cuáles de entre el conjunto de transmisores de ultrasonidos (S1, S2, S3)son capaces de establecer una comunicación con la etiqueta de control portátil (PT) en elcanal de ultrasonido, y
- Para determinar una posición (POS) dentro de dicha zona, basándose en el primer valor dedatos (D1) y datos relativos a la posición proporcionados por la integración de una velocidadbasado en el segundo valor de datos (D2).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08159582.
Solicitante: UNIVERSITETET I OSLO.
Nacionalidad solicitante: Noruega.
Dirección: BOKS 1072 BLINDERN 0316 OSLO NORUEGA.
Inventor/es: HOLM,Sverre.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S1/72 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
- G01S11/14 G01S […] › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
PDF original: ES-2385956_T3.pdf
Fragmento de la descripción:
Sistema de localización zonal de alta capacidad por ultrasonidos.
CAMPO DE LA INVENCIÓN
La presente invención se relaciona con el campo de sistemas de ubicación o localización, especialmente la invención está relacionada con el campo de los sistemas de localización zonal basados en ultrasonidos. Más concretamente, la invención proporciona un sistema de localización zonal de alta capacidad por ultrasonidos asistido por comunicación de radiofrecuencia.
ANTECEDENTES DE LA INVENCIÓN
Existe una gran variedad de sistemas de ubicación o localización aptos para seguir la trayectoria de personas u objetos móviles en tiempo real, por ejemplo en el interior de un lugar de trabajo o una fábrica. Tales sistemas determinan la localización de una etiqueta de control portátil adherida a la persona u objeto por el establecimiento de una comunicación entre la etiqueta de control portátil y una o más emisoras legales de ultrasonidos. Se han sugerido muchos procedimientos y tipos de señales para tales sistemas.
Las señales de Radio Frecuencia (RF) pueden ser usadas para determinar la posición de la etiqueta de control portátil, por ejemplo, mediante el cálculo de la posición geométrica de la etiqueta de control portátil basada en la triangulación, esto es, basada en diferencias de fase de percepción en una señal de RF desde la etiqueta de control portátil recibida en tres emisoras fijas legales de ultrasonidos. De forma alternativa, los sistemas de RF pueden tener una estimación de la posición sobre la base de la amplitud de la señal de RF. Tales sistemas sólo requieren unas pocas emisoras de RF, ya que las señales de RF pueden cubrir una zona grande, pues tales señales penetran con facilidad elementos de construcción, etc. Sin embargo, para aplicaciones de localización zonal, las señales de RF son menos adecuadas, en cuanto la posición geométrica de la etiqueta de control portátil debe ser determinada de forma muy precisa, por ejemplo, para poder determinar en cuál de dos habitaciones vecinas está presente la etiqueta de control portátil. Un error de 30-40 cm. es suficiente para provocar el error entre dichas dos habitaciones, si una etiqueta de control está ubicada de forma próxima a la pared que separa las dos habitaciones.
Se han sugerido también señales infrarrojas (más conocidas por sus siglas en inglés, IR) para sistemas de localización. Tales sistemas son adecuados para localización zonal, en cuanto la radiación de señal IR está limitada, de forma natural, por el suelo, paredes, y techo de una habitación. Sin embargo, en la práctica, la percepción por IR es vulnerable y requiere de muchos sensores para cubrir una zona, ya que la comunicación por señal IR es fácilmente dificultada si no hay una línea de visión entre el transmisor y el receptor, por ejemplo, una cortina delgada puede suponer un obstáculo lo suficientemente efectivo para destruir la comunicación IR.
Las señales de ultrasonido (US) son adecuadas para un sistema de localización zonal debido a la propiedad inherente a la radiación de señales de US de estar limitada por el suelo, paredes y techo de una habitación, proporcionando así, de forma automática, una división intelectual en zonas. En comparación con las señales IR, las señales de US son menos vulnerables a los efectos de los obstáculos, ya que muchos obstáculos proporcionarán reflejos acústicos de señales de US, sirviendo así para proporcionar una conexión de US aceptable entre un receptor y un transmisor incluso si no hay una línea de visión transparente. Sin embargo, en comparación con las señales de RF, la determinación de ubicación por medio de señales de US requiere la existencia de emisoras de US ubicadas en todas las zonas, y se requiere incluso una mayor relación de emisoras de US por zona en las zonas definidas como una habitación grande o dos o más habitaciones interconectadas. Además, los sistemas de localización basados en señales de US tienen una capacidad bastante pobre. Esto se debe al hecho de que las señales de US viajan a la velocidad del sonido, que es mucho más lenta que las ondas de RF, y, además, el ancho de banda de las ondas de US tiene una extensión temporal considerablemente más larga, de tal forma que la determinación de la ubicación de una etiqueta de control portátil individualizada puede suponer uno o más segundos. Esto es demasiado largo para que los sistemas funcionen adecuadamente, por ejemplo, si se ubican 20 ó 30 etiquetas de control en una zona al mismo tiempo.
Se han sugerido sistemas de localización que utilizan una combinación de señales de US y de RF. La cobertura espacial, algo limitada, de sistemas basados en US, ha sido superada por la disposición de un procedimiento de ubicación de US que es complementado por un procedimiento de localización por RF para su uso en supuestos en donde el procedimiento de localización por US falla debido a una extensión espacial limitada, por ejemplo, cuando una persona que lleva una etiqueta de control ha salido de las zonas predeterminadas.
La patente US2005/0140508 A1 divulga un sistema de localización adaptado para recibir una señal de RF y un señal IR o de US asociadas entre sí, permitiendo, por tanto, que se proporcionen datos únicos en relación con ambas señales sólo en la señal de RF, ahorrando, por tanto, energía para enviar señales IR o de US.
La patente US 2006/0077759 A1, inventada por el inventor de esta misma invención, divulga un sistema de localización de US en el que las etiquetas electrónicas de identificación están equipadas con un receptor de US y un transmisor de RF. Las etiquetas de control de identificación reciben una señal de US cuya hora de llegada miden. Esta hora de llegada, junto con un código de identificación, es enviada por la etiqueta de control en una señal de RF a una unidad central que, entonces, calcula la posición de la etiqueta de control de identificación. La duración de la batería de la etiqueta de control es mejorada, ya que no necesita enviar señales de US sino solamente señales de RF que son menos consumidoras de energía. Sin embargo, la medición del tiempo de llegada de US es compleja y sensible al ruido, y, así, en la práctica, a menudo reduce la extensión a menos de lo deseado. Por tanto, la fuerza y utilidad de tal sistema están bastante limitadas.
La patente WO 2007/110626 describe un procedimiento para determinar una posición en tres dimensiones de un componente móvil en relación con un componente fijo. El componente fijo tiene una pluralidad de transductores fijos de US, en una disposición en la que están distanciados espacialmente, y un transductor de RF. El componente móvil tiene un transductor de US y un transductor de RF. El componente fijo envía una señal de encendido de RF, provocando que el componente móvil envíe una señal de US y reiniciando temporizadores asociados con cada uno de los transductores fijos de US. Los tiempos de llegada de US a cada uno de los múltiples transductores fijos de US son detectados entonces, y se usan cálculos trigonométricos para determinar la posición tridimensional del componente móvil. Tal sistema es apto para una localización tridimensional de alta precisión, pero, a fines de localización zonal, la extensión de la distancia y la capacidad está demasiado limitada. Además, el componente móvil requiere de un transmisor de US que consume energía.
El documento “WALRUS: Wireless Acoustic Location with Room-Level Resolution using Ultrasound”, by G. Borriello, A. Liu, T. Offer, C. Palistrant y S. Sharp, en Proc. 3rd Int. Conf. On Mobile Systems, Applications and Services (Seattle, WA, June 2005) , ACM, Nueva York, NY, describe un sistema de localización zonal basado en US adecuado para determinar en qué habitación está presente una unidad móvil. La unidad móvil transmite una señal de RF a una emisora central.
La patente US 2002/0167417 A1 describe un sistema de localización zonal en el que un transmisor de US es colocado en cada zona y transmite un código único en la señal de US, identificando así la zona por US. Una etiqueta de control portátil recibe las señales de US y transmite en una señal de RF el código único que identifica la zona conjuntamente con su propio código de identificación.
Sin embargo, amos sistemas descritos en el documento “WALRUS” y en la patente US 2002/0167417 A1 sufren de una precisión de localización bastante tosca, lo que es inconveniente para la cobertura de grandes espacios o habitaciones de una geometría complicada.
Las patentes US 2005/0035862... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de localización zonal dispuesto para determinar en qué zona de un conjunto predeterminado de zonas (Z1, Z2, Z3) , tales como habitaciones, está presente una etiqueta de control portátil (PT) , incluyendo dicho sistema,
- Un conjunto de transmisores de ultrasonidos (S1, S2, S3) ubicado en zonas respectivas del conjunto predeterminado de zonas (Z1, Z2, Z3) , en el que los transmisores de ultrasonidos (S1, S2, S3) están dispuestos para generar una señal de ultrasonido (US) , tal como una señal transmitida en operaciones intermitentes de ultrasonidos.
- Una etiqueta de control portátil (PT) con un código asociado de identificación (PTID) , incluyendo la etiqueta de control portátil (PT)
- Un receptor de ultrasonidos (USR) dispuesto para recibir la señal de ultrasonido (US) , -Medios de procesamiento de la señal (SP) , dispuestos para
- Medir una intensidad de la señal de ultrasonido recibida (US) y para generar un primer valor de datos (D1) basado en dicha intensidad, y
- Para medir un parámetro de efecto Doppler basado en la señal recibida de ultrasonido (US) y para generar un segundo valor de datos (D2) basado en dicho parámetro de efecto Doppler, y
- Un transmisor de Radio Frecuencia (RFT) dispuesto para transmitir una señal de Radio Frecuencia (RFS) con datos que representan el código de identificación (PTID) , y los primeros y segundos valores de datos (D1, D2) ,
- Una emisora de Radio Frecuencia (RS) dispuesta para recibir la señal de Radio Frecuencia (RFS) de la etiqueta de control portátil (PT) , y
- Un procesador (P) conectado, de forma operativa, a la emisora de Radio Frecuencia (RS) , estando dispuesto el procesador (P) para
- Identificar la etiqueta de control portátil (PT) basada en el código de identificación (PTID) ,
- Para determinar en qué zona (Z2) está presente la etiqueta de control portátil (PT) , basándose en la detección de cuáles de entre el conjunto de transmisores de ultrasonidos (S1, S2, S3) son capaces de establecer una comunicación con la etiqueta de control portátil (PT) en el canal de ultrasonido, y
- Para determinar una posición (POS) dentro de dicha zona, basándose en el primer valor de datos (D1) y datos relativos a la posición proporcionados por la integración de una velocidad basado en el segundo valor de datos (D2) .
2. Sistema de localización zonal de acuerdo con la reivindicación 1, en el que el procesador (P) está dispuesto para determinar una distancia entre el transmisor de ultrasonidos (S1, S2, S3) y la etiqueta de control portátil (PT) basada en el primer valor de datos (D1) y, en consecuencia, determinar dicha posición (POS) dentro de dicha zona (Z2) .
3. Sistema de localización zonal de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la señal de ultrasonidos (US) transmitida de uno de los transmisores de ultrasonidos (S1, S2, S3) incluye un código (USID) que identifica dicho transmisor de ultrasonidos (S1, S2, S3) .
4. Sistema de localización zonal de acuerdo con la reivindicación 3, en el que la etiqueta de control portátil (PT) transmite datos recibidos en la señal de ultrasonidos (US) en una señal de Radio Frecuencia (RFS) .
5. Sistema de localización zonal de acuerdo con la reivindicación 4, en el que la etiqueta de control portátil (PT) transmite el código (USID) que identifica el transmisor de ultrasonidos (S1, S2, S3) en la señal de Radio Frecuencia (RFS) , y en el que el procesador (P) determina en qué zona (Z2) está presente la etiqueta de control portátil (PT) , basándose en el código (USID) que identifica el transmisor de ultrasonidos (S1, S2, S3) recibidos en la señal de Radio Frecuencia (RFS) .
6. Sistema de localización zonal de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la etiqueta de control portátil (PT) incluye un receptor de Radio Frecuencia dispuesto para recibir una señal de Radio Frecuencia de un transmisor externo de Radio Frecuencia.
7. Sistema de localización zonal de acuerdo con la reivindicación 6, en el que la etiqueta de control portátil (PT) está dispuesta para recibir una solicitud de localización en dicha señal de Radio Frecuencia del transmisor externo de Radio Frecuencia.
8. Sistema de localización zonal de acuerdo con la reivindicación 7, en el que la etiqueta de control portátil (PT) está dispuesta para activar el receptor de ultrasonidos (USR) en respuesta a dicha solicitud.
9. Sistema de localización zonal de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el receptor de Radio Frecuencia (RFR) y los transmisores de ultrasonidos (S1, S2, S3) son
componentes fijos, y en donde el procesador (P) está conectado, de forma operativa, al receptor de Radio Frecuencia por medio de una conexión de Radio Frecuencia inalámbrica.
10. Sistema de localización zonal de acuerdo con cualquiera de las reivindicaciones precedentes, incluyendo una pluralidad de etiquetas de control portátil (PT) cada una de ellas con un código de identificación único asociado (PTID) .
11. Sistema de localización zonal de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el conjunto predeterminado de zonas (Z1, Z2, Z3) se corresponde con habitaciones de una construcción (B) .
12. Sistema de localización zonal de acuerdo con cualquiera de las reivindicaciones precedentes, en el que al menos unos transmisores de ultrasonidos primero y segundo, espacialmente distanciados, están situados en, al menos, una de las zonas del conjunto predeterminado de zonas (Z1, Z2, Z3) , y en donde la etiqueta de control portátil (PT) está dispuesta para recibir una primera señal de ultrasonidos del segundo transmisor de ultrasonidos.
13. El uso de un procedimiento acorde con cualquiera de las reivindicaciones 1-12 para localizar personas.
14. El uso de un procedimiento acorde con cualquiera de las reivindicaciones 1-12 para localizar objetos.
15. Procedimiento para la determinación de en qué zona de un conjunto predeterminado de zonas (Z1, Z2, Z3) está presente una etiqueta de control portátil (PT) , incluyendo dicho procedimiento
- Transmisión de una señal de ultrasonido en un canal de ultrasonido desde un conjunto de emisoras de ultrasonidos (S1, S2, S3) de los que, al menos uno, está ubicado en cada una de las zonas del conjunto predeterminado de zonas (Z1, Z2, Z3)
- Recepción de la señal de ultrasonido (US) en la etiqueta de control portátil (PT) , -Determinación de una intensidad del ultrasonido (US) recibido -Determinación de una intensidad del ultrasonido (US) recibido, y generación de un primer
valor de datos (D1) basado en dicha intensidad,
- Determinación de un parámetro de efecto Doppler basado en la señal de ultrasonido (US) recibida, y generación de un segundo valor de datos (D2) basado en dicho parámetro de efecto Doppler,
- Transmisión de una señal de Radio Frecuencia (RFS) desde la etiqueta de control portátil, incluyendo un código (PTID) que identifica la etiqueta de control portátil, y los valores de datos primero y segundo (D1, D2) ,
- Recepción de la señal de RF (RFS) desde la etiqueta de control portátil (PT) , -Identificación de la etiqueta de control portátil (PT) basada en el código de identificación (PTID) ,
- Determinación de en qué zona (Z2) está presente la etiqueta de control portátil (PT) por la detección de qué emisora del conjunto de emisoras de ultrasonidos (S1, S2, S3) es capaz de establecer una comunicación con la etiqueta de control portátil (PT) en el canal de ultrasonidos, y
- Determinación de una posición (POS) dentro de dicha zona, basada en el primer valor de datos (D1) y datos relativos a la posición proporcionados por la integración de una velocidad basada en el segundo valor de datos (D2) .
Patentes similares o relacionadas:
Medición de distancia acústica para una red de arrastre, del 15 de Abril de 2020, de Scantrawl a.s: Un método para determinar la distancia entre una embarcación y al menos un módulo de sensor dispuesto en el equipo de pesca que es remolcado por la embarcación, […]
Dron Perfilador de corrientes fluviales, del 24 de Junio de 2019, de UNIVERSIDAD DE VALLADOLID: Dron perfilador de corrientes fluviales. Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso […]
Sistema y método de posicionamiento acústico subacuático, del 29 de Noviembre de 2017, de TrackServer, Inc: Un método para determinar la posición de un dispositivo subacuático, que comprende: proporcionar una pluralidad de dispositivos de estación […]
Procedimiento, sistema y programa informático para determinar distancias y posiciones, del 30 de Agosto de 2017, de Van Taunay, Gerald Jules Rudolf: Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, […]
 Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Procedimiento para determinar una diferencia de distancia, del 8 de Marzo de 2017, de SKJOLD-LARSEN, HENNING: Un procedimiento para determinar la diferencia de distancia desde un punto de referencia a al menos dos módulos de sensor , todos ellos situados bajo el agua, […]
 Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible, del 15 de Octubre de 2014, de MOBA - MOBILE AUTOMATION AG: Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible con un primer sensor ultrasónico que comprende un primer […]