SISTEMA DE DETECCIÓN ÓPTICA DE POSICIÓN 3D CON CÁMARA ÚNICA.
Se describe un sistema mediante el que resulte posible detectar la posición 3D de uno o varios objetos posicionados en el interior de un volumen de control correspondiente a una zona espacial predeterminada,
con la utilización de una única cámara de visualización. El sistema incluye dicha cámara sustentada por una plataforma de soporte que incorpora además al menos un medio reflector mediante el que se refleja a hacia la cámara la luz emitida por elementos emisores de luz asociados a uno o más puntos de un objeto situado en dicho volumen de control y cuya posición se desea detectar, estando este volumen de control determinado por la intersección entre la zona espacial de visión normal de la cámara y la zona espacial susceptible de ser reflejada por al menos un elemento reflector. El sistema incluye además un medio de control del tipo de un ordenador o similar y es particularmente aplicable para el cálculo de la posición, orientación distancia y velocidad de uno o varios objetos a partir de la luz emitida desde uno o más emisores asociados a otros tantos puntos de dicho objeto.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201000141.
Solicitante: VEGA VERA, Carlos Jesús.
Nacionalidad solicitante: España.
Inventor/es: VEGA VERA,Carlos Jesús.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01B11/03 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la medida de coordenadas de puntos.
Fragmento de la descripción:
Sistema de detección óptica de posición 3D con cámara única.
Objeto de la invención
La presente invención se refiere a un sistema de detección óptica de posición 3D con cámara única, que aporta esenciales características de novedad y notables ventajas con respecto a los medios conocidos y utilizados para los mismos fines en el estado actual de la técnica.
Más en particular, la invención propone el desarrollo de un sistema simplificado para la determinación de la posición 3D con la ayuda de una cámara única, en el que dicha cámara está posicionada de manera que cubre un determinado volumen espacial en el que se encuentran situados uno o más emisores de luz en correspondencia con el punto
o puntos cuya posición 3D se desea determinar, recibiendo la luz procedente de dichos emisores a través de uno o más elementos reflectores mediante los que se define un segundo volumen delimitado por ángulos máximo y mínimo de reflexión, y cuya intersección con el volumen de visión espacial de la cámara determina el volumen útil en el que se puede detectar la posición 3D de los objetos buscados. La luz recibida desde los emisores tanto de manera directa como de manera reflejada, es analizada por el hardware (un ordenador o un circuito con procesador programable equivalente) incorporado en el sistema, estando dicho hardware capacitado para ejecutar un software específico mediante el que se provoca el encendido y apagado de los emisores de luz en base a una secuencia específica predeterminada.
El campo de aplicación de la invención se encuentra comprendido dentro de los sectores de la técnica dedicados a realizar análisis ópticos por ordenador, desarrollo de interfaces informáticos, y operaciones de metrotecnia y cinemática.
Antecedentes y Sumario de la invención
Los expertos en la materia son conocedores de que, en la actualidad, la detección óptica de la posición 3D de un punto, necesita la utilización de, como mínimo, dos cámaras de visualización, debido a que a partir del análisis de la imagen recogida por cada una de las cámaras se puede obtener una recta dentro de la cual estarla situado el punto estudiado. Calculando el punto de intersección de las dos rectas obtenidas, una por cámara, se obtiene la posición 3D del punto estudiado. Se comprenderá que, cuanto mayor sea el número de cámaras utilizadas, mayor es la capacidad de compensación de las imprecisiones y errores que pueden aparecer en el proceso de cálculo de la posición del punto.
Lo anterior supone que se deban analizar como mínimo dos imágenes, algo que es problemático si se desea calcular la posición del punto en tiempo real, ya que supone una mayor cantidad de datos a procesar (los píxeles de las imágenes) y requiere unos equipos de mayor capacidad de cálculo. Si se desea obtener la posición 3D del punto con una tasa de actualización de, por ejemplo, 30 veces por segundo, lo adecuado es minimizar los datos a procesar para que un equipo ordinario permita obtener la tasa de actualización buscada.
Teniendo en cuenta la exposición realizada en lo que antecede, se entiende que existe en el estado actual de la técnica una necesidad de un sistema mediante el que se simplifiquen las operaciones de determinación posicional 3D de un punto en el espacio, y se agilice dicha detección posicional, de manera precisa y con la intervención del mínimo número de recursos posible. Este ha sido el objetivo que se ha propuesto desarrollar la presente invención, el cual ha sido plenamente alcanzado con el sistema que se va a describir en lo que sigue, y cuyas características principales aparecen recogidas en la porción caracterizadora de la reivindicación 1 anexa.
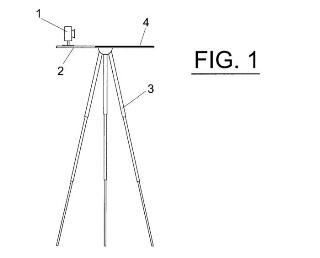
El sistema de la presente invención que va a ser descrito en lo que sigue, solamente necesita analizar la imagen recogida por una única cámara, por lo que los datos totales a procesar son menores, pero sin que ello suponga una pérdida de información esencial. A tal efecto, el sistema comprende cuatro elementos esenciales:
1. Emisores de luz situados en los puntos a detectar;
2. Una cámara que recoge las imágenes a analizar y que se encarga de captar la luz de los emisores;
3. Una estructura con uno o varios elementos reflectores, y
4. Hardware de control, tal como un ordenador o un circuito electrónico con procesador programable equivalente, conectado de manera alámbrica o inalámbrica a los emisores de luz y a la cámara, que ejecutará un software específico que permite encender, de manera ordenada, los emisores de luz, y que permite analizar, un número predeterminado de veces por segundo, la imagen recogida por la cámara.
El proceso de detección de la posición 3D de un punto consta de los siguientes pasos, que se repetirán las veces por segundo que hayan sido previamente establecidas:
1. El hardware da la orden para que uno de los emisores de luz situados en el (los) objeto (s) , se encienda;
2. La cámara, que se encuentra situada en la estructura con elemento reflector, recoge en su imagen tanto la luz directa del emisor de luz encendido como su reflejo sobre el Elemento Reflector. Los rayos de luz reflejados presentan ángulos de entrada y de salida sobre el elemento reflector de la misma amplitud;
3. La imagen se envía al hardware, donde un software específico la analiza y calcula la posición 3D del emisor de luz;
4. El hardware enciende a continuación el siguiente emisor de luz, repitiéndose los puntos 2 y 3, y calculando la posición 3D de este segundo emisor. Así, encendiendo de manera ordenada y consecutiva varios emisores de luz, es posible obtener la posición de varios puntos en cada una de las ejecuciones realizadas por segundo;
5. Conocida la posición de varios puntos, es posible efectuar la definición de vectores asociados a la posición 3D de dichos puntos;
6. El hardware ejecuta los pasos anteriores las veces por segundo establecidas.
De acuerdo con la invención, los emisores de luz se encienden automáticamente en el orden que el usuario defina previamente en el software, con el objetivo de calcular la posición 3D de varios puntos, o podrán encenderse individualmente, si el usuario así lo decide, para calcular la posición 3D de un único punto.
La cámara está situada de manera que visualiza un volumen del espacio de manera directa y otro volumen de manera indirecta mediante su reflejo en el elemento reflector. La intersección de los dos volúmenes anteriores será el volumen útil, dentro del cual es posible la obtención de la posición 3D de cada emisor de luz, y que se denominará “volumen de control” a efectos de la descripción, quedando limitado por la superficie límite de detección.
La geometría de dicho volumen viene definida por:
1. Las dimensiones, altura, e inclinación a la que se sitúe el elemento reflector, y la posición relativa de la cámara con respecto al mismo, ya que todas las variables anteriores suponen una variación en el volumen que la cámara ve reflejado en el elemento reflector;
2. Los ángulos de visión de la cámara (planos α y β que van a ser definidos en relación con las Figuras) .
Los parámetros anteriores se ajustan de manera que el volumen de control coincida con la región del espacio en la que se desea conocer la posición 3D de los emisores de luz.
Fuera de este volumen de control, la luz directa del emisor de luz o su reflejo en el elemento reflector, quedan fuera del ángulo de visión de la cámara y no es posible la obtención de la posición 3D del punto, aunque no obstante, esta situación podría ser solucionada situando varios sistemas de detección óptica de posición 3D de cámara única, o bien varios elementos reflectores que no dejen ningún volumen de la estancia sin controlar.
Los emisores de luz utilizados en el sistema emiten en una longitud de onda e intensidad que destacan respecto a las mismas magnitudes de la luz del entorno, para que puedan ser diferenciados de éstas en el momento del análisis. La cámara escogida, obviamente, deberá ser sensible a longitud de onda e intensidad de los emisores de luz utilizados en el sistema.
Debido al uso de una única cámara, en cada instante...
Reivindicaciones:
1. Sistema de detección óptica de posición 3D de cámara única, en particular un sistema que permite calcular a objetos la posición, orientación distancia y velocidad de múltiples puntos asociados que están dentro de una zona espacial correspondiente con un volumen de control, con la utilización de una única cámara de visualización, estando el sistema caracterizado porque comprende una estructura compuesta por una cámara (1) , una plataforma de soporte de dicha cámara (1) constituida por una plancha (2) o similar sustentada por medio de un trípode o similar, o bien colgada de una estructura, y al menos un medio reflector (4) dispuesto sobre la mencionada plataforma (2) en una posición enfrentada a la cámara (1) y a una distancia predeterminada de esta última, y en el que los múltiples puntos asociados a los objetos cuya posición se desea determinar consisten esencialmente en dispositivos emisores de luz.
2. Sistema según la reivindicación 1, caracterizado porque incluye adicionalmente un dispositivo de control, tal como un ordenador u otro circuito con procesador programable equivalente, que soporta un software específico que permite secuenciar el encendido de los diversos elementos emisores de luz asociados al objeto, u objetos, cuya posición 3D se desea detectar, estando dicho dispositivo de control conectado a los emisores de luzyala cámara (1) de visualización de manera alámbrica o inalámbrica.
3. Sistema según las reivindicaciones 1 y 2, caracterizado porque la zona espacial correspondiente al volumen de control corresponde con la intersección entre el volumen espacial de visión de la cámara (1) y el volumen espacial en el que la luz emitida por los distintos emisores puede ser reflejada por el mencionado elemento (4) reflector.
4. Sistema según las reivindicaciones1a3, caracterizado porque los mencionados medios emisores de luz consisten principalmente en diodos LEDs que emiten a una longitud de onda y con una intensidad que destacan considerablemente respecto a las de la luz del entorno, como pueden ser los infrarrojos.
5. Sistema según las reivindicaciones 1 a 4, caracterizado porque el (los) medio (s) reflector (es) (4) consiste preferentemente en espejo o similar.
Patentes similares o relacionadas:
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende: a) un primer sensor de dirección espacial […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Detección de posición, del 18 de Marzo de 2020, de Airbus Operations Limited: Aparato para determinar la posición de un objeto que tiene uno o más elementos magnéticos , el aparato comprende una […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
PROCEDIMIENTO DE CARACTERIZACION DE ELEMENTOS REFLECTORES A PARTIR DE LOS HACES DE LUZ REFLEJADOS EN LOS MISMOS, del 27 de Enero de 2020, de FUNDACION CENER-CIEMAT: Dispositivo, sistema y procedimiento de caracterización de elementos reflectores a partir de los haces de luz reflejados en los mismos y en […]