Procedimiento y dispositivo de medición y posicionamiento de objetos.
Procedimiento de medición y posicionamiento de un objeto (2) en forma de cubo,
de paralelepípedo rectángulo, de cilindro o de prisma recto, cuya superficie de base es un polígono regular que tiene un número par de lados, en el que las dimensiones del objeto (2) son determinadas y en el que, después de la determinación de la longitud o de la anchura del objeto (2), este objeto (2) es girado con ayuda de un plato rotativo (3) para determinar respectivamente su anchura o su longitud,
caracterizado por que este procedimiento presenta las etapas siguientes:
- etapa 1: colocación del objeto (2) por su superficie de base sobre un plato rotativo (3),
- etapa 2: determinación de la longitud o de la anchura de la superficie de base por:
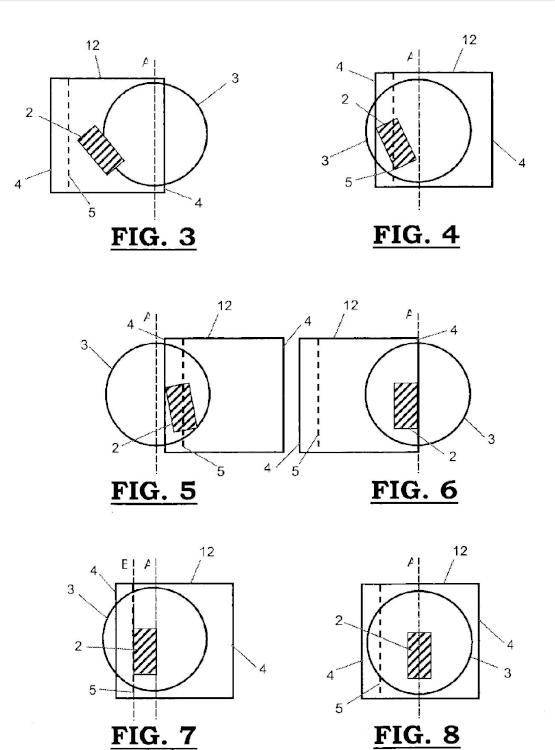
a. desplazamiento del objeto (2) hasta que un primer lado de su superficie de base se coloque a lo largo de una primera línea de referencia (A),
b. determinación de la posición del segundo lado de la superficie de base, situado enfrente de este primer lado, por medio de un detector de presencia (5), siendo definida una segunda línea de referencia (B) paralela a la primera línea de referencia (A) y en contacto con este segundo lado,
c. determinación de la distancia entre la primera línea de referencia (A) y la segunda línea de referencia (B) como longitud o anchura de la superficie de base,
- etapa 3: con ayuda del plato rotativo (3), rotación del objeto (2) en un ángulo de rotación comprendido entre 45º y 135º,
- etapa 4: determinación respectivamente de la anchura o de la longitud de la superficie de base por:
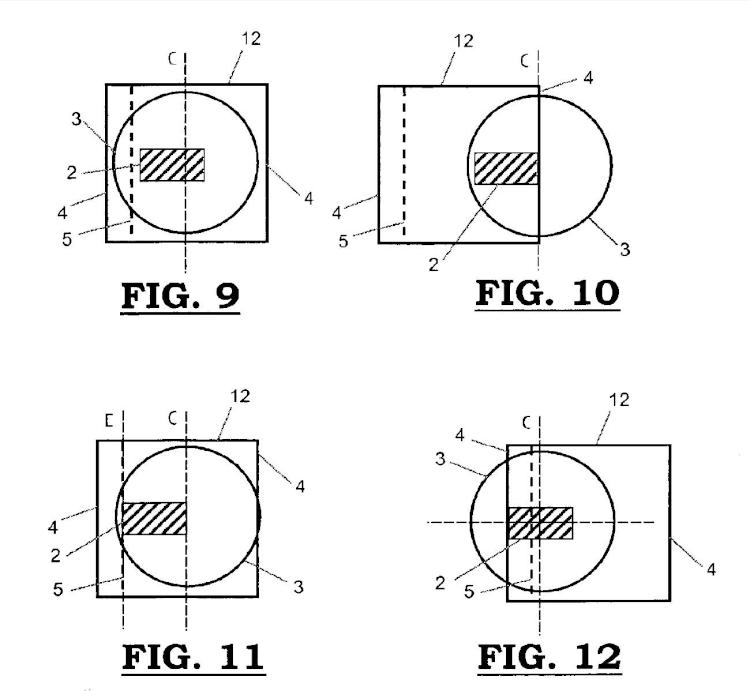
a. desplazamiento del objeto (2) hasta que un tercer lado de su superficie de base se coloque a lo largo de una tercera línea de referencia (C),
b. determinación de la posición del cuarto lado de la superficie de base, situado enfrente de este tercer lado, por medio de un detector de presencia (5), siendo definida una cuarta línea de referencia (D) paralela a la tercera línea de referencia (C) y en contacto con este cuarto lado,
c. determinación de la distancia entre la tercera línea de referencia (C) y la cuarta línea de referencia (D), respectivamente, como la anchura o la longitud de la superficie de base,
y, además, determinación de la altura del objeto (2) con ayuda de un detector de altura (6).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/052895.
Solicitante: Pharmatechnik Unternehmensberatung S.A.
Nacionalidad solicitante: Luxemburgo.
Dirección: 25A boulevard Royal 2449 Luxembourg LUXEMBURGO.
Inventor/es: ZIMMERMAN,KLEMENS, VANDERGHOTE,HENDRIK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B65G47/28 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › durante el transporte por un solo transportador.
- B65G47/90 B65G 47/00 […] › Dispositivos para coger o dejar los artículos o los materiales.
- G01B11/03 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la medida de coordenadas de puntos.
- G01B5/02 G01B […] › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › para la medida de la longitud, el ancho o el espesor (G01B 5/004, G01B 5/08 tienen prioridad).
PDF original: ES-2511867_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo de medición y posicionamiento de objetos.
Introducción
La presente invención se refiere a un procedimiento y a un dispositivo de medición y posicionamiento de un objeto que presenta la forma de un cubo, de un paralelepípedo rectángulo, de un cilindro o de un prisma recto, con la superficie de un polígono regular que tiene un número par de lados como superficie de base, estando determinadas las dimensiones del objeto, y en el cual, después de la determinación de la longitud o de la anchura del objeto, se gira el objeto con ayuda de un plato rotativo para determinar respectivamente su anchura o su longitud.
Estado de la técnica
Un cubo o un paralelepípedo rectángulo son figuras espaciales conocidas y cada cara de estas figuras espaciales puede constituir una superficie de base. Por cilindro se entiende aquí una figura espacial que posee como superficie de base un círculo o una elipse y que presenta perpendicularmente a un eje una sección transversal que corresponde globalmente al mismo círculo o a la misma elipse. Un prisma recto es una figura espacial que presenta un mismo polígono como superficie de base y superficie superior y unos rectángulos como caras laterales. Durante la determinación de las dimensiones de un cubo, un cilindro, cuya superficie de base es un círculo, o un prisma recto, cuya superficie de base es un polígono regular que tiene un número par de lados, se constatará en efecto que la longitud y la anchura de la superficie de base de tal figura espacial son iguales una a otra.
La medición y el posicionamiento de un objeto que presenta las características mencionadas anteriormente se desean sobre todo cuando tales objetos están dispuestos en un almacén automático. Dicho almacén se utiliza frecuentemente, por ejemplo, para el almacenamiento de envases de medicamentos. Para utilizar de manera óptica el espacio presente en el almacén, está indicado determinar las dimensiones de estos objetos y colocar estos objetos en la orientación más indicada en el espacio previsto a este efecto en el almacén.
Un almacén automático de esta clase para envases de medicamento se describe, por ejemplo, en el documento EP 0 620 528. El almacén descrito comprende varias estanterías que se llenan sistemáticamente en una sucesión y una determinación del emplazamiento controlados por ordenador.
Ciertos dispositivos ya se han puesto a punto para la medición y el posicionamiento de objetos en forma de paralelepípedo rectángulo de modo que se pueda colocar a continuación de manera juiciosa en tal almacén.
En un primer sistema, las dimensiones del objeto se determinan con ayuda de un reconocimiento de forma basado en imágenes tomadas por cámara. Unos dispositivos de manipulación toman los envases y los posicionan. Estos sistemas que utilizan cámaras constituyen una solución costosa de medición y posicionamiento de objetos.
El dispositivo y el procedimiento correspondiente de medición y posicionamiento de envases rectangulares descritos en el documento EP 1 748 004 se han puesto a punto como alternativa a esta solución costosa. En este dispositivo, cada envase es apretado entre dos horquillas para determinar la longitud o la anchura del envase. Después de la determinación de la longitud o la anchura del envase, este envase es girado 90º con ayuda de un plato rotativo para determinar respectivamente su anchura o su longitud. Su altura se determina a continuación con ayuda de un detector de altura.
El dispositivo divulgado por el documento EP 1 748 004 presenta un número bastante grande de componentes mecánicos, de modo que el riesgo de fallo de la instalación en caso de fallo de uno de estos componentes es bastante elevado. Un gran inconveniente suplementario de esta instalación es que, durante la medición de su longitud y su anchura, cada envase es apretado entre dichas horquillas. El riesgo de que se dañe un envase o se abra durante este apriete es bastante elevado.
Objeto de la invención
El problema en la base de la presente invención consiste en prever un procedimiento y un dispositivo simples de medición y posicionamiento de un objeto que presenten las características mencionadas anteriormente, pero que no adolecen de los inconvenientes mencionados anteriormente del estado de la técnica.
Este objetivo de la invención se alcanza, en primer lugar, proponiendo el modo de realización definido en la primera reivindicación.
Descripción general de la invención reivindicada con sus principales ventajas
Con este procedimiento, el objeto puede manipularse durante su medición y su posicionamiento sin que el objeto sea apretado, de modo que éste se dañará menos deprisa o un objeto que presenta la forma de un envase se abrirá
menos deprisa que en el caso del estado de la técnica.
En un cilindro, un lado de la superficie de base es en realidad un punto de la extensión del círculo o de la elipse que forma la superficie de base.
La determinación de la altura puede efectuarse selectivamente antes, durante o después de las etapas 1 a 4 inclusive.
El ángulo de rotación sobre el cual es girado el objeto equivale preferentemente sustancialmente a 90º . De esta manera, se puede realizar la etapa 4a de forma particularmente cómoda sin demasiadas manipulaciones del objeto.
La etapa 1 de este procedimiento comprende preferentemente las etapas parciales siguientes:
a. llevar por lo menos parcialmente el objeto sobre el plato rotativo,
b. con ayuda del desplazamiento de dos elementos de desplazamiento que se desplazan simultáneamente, que están previstos a distancia constante uno de otro y que delimitan una zona rectangular más grande que el objeto, que se va a medir y posicionar y/o de la rotación del plato rotativo, desplazamiento del objeto hasta que repose sobre su superficie de base y
c. con ayuda del desplazamiento de los elementos de desplazamiento y/o de la rotación del plato rotativo, desplazamiento del objeto hasta que esté completamente situado sobre el plato rotativo.
Cuando se coloca el objeto, este objeto puede situarse en parte al lado del plato rotativo, o el objeto puede apoyarse sobre otro lado que su superficie de base, etc. Por desplazamiento y rotación del objeto se puede garantizar que el objeto se apoye sobre el plato rotativo por su superficie de base durante el lanzamiento de la etapa 2. Esto puede realizarse de varias maneras que se describirán más adelante en la descripción detallada.
En las etapas 2a y 4a, el objeto se desplaza preferentemente con ayuda de dos elementos de desplazamiento que se desplazan simultáneamente, que están previstos a una distancia constante uno de otro y que delimitan una zona rectangular más grande que el objeto que debe medirse y posicionarse, siendo paralelos los lados de esta abertura rectangular a la primera y la tercera línea de referencia, hasta que el primer lado o el tercer lado de esta abertura esté situado respectivamente a lo largo de la primera o de la tercera línea de referencia.
Manipulando el objeto únicamente con ayuda de estos elementos de desplazamiento y de un plato rotativo, se puede medir y posicionar el objeto sin que nunca este objeto sea apretado.
En un modo de realización particular de este procedimiento, el objeto es desplazado en la etapa 2a y en la etapa 4a con ayuda de elementos de desplazamiento hasta por encima del punto central del plato rotativo y, a continuación, es hecho retroceder en el sentido opuesto hasta que su primer lado o su tercer lado se sitúe a lo largo de la línea central del plato rotativo que sirve respectivamente de primera o tercera línea de referencia. Un objeto situado inicialmente bajo un ángulo relativamente grande con respecto a la primera o la tercera línea de referencia vendrá con certeza a colocarse a lo largo de esta línea de referencia después de este desplazamiento en dos direcciones.
Para simplificar el posicionamiento del objeto, en un modo de realización ventajoso del procedimiento según la presente invención, después de la etapa 2 el objeto es desplazado con ayuda de los elementos de desplazamiento hasta que la superficie de base del objeto se sitúe simétricamente con respecto a la primera línea de referencia.
De esta manera, después de la rotación y durante el desplazamiento del objeto en el estado 4 con ayuda de los elementos de desplazamiento, se puede mantener el objeto sobre el plato rotativo.
En otro modo de realización particular del procedimiento según la presente invención, durante las etapas 1 a 4 inclusive, se identifica el objeto con ayuda de medios de identificación. De manera más particular, dicha identificación puede comprender... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de medición y posicionamiento de un objeto (2) en forma de cubo, de paralelepípedo rectángulo, de cilindro o de prisma recto, cuya superficie de base es un polígono regular que tiene un número par de lados, en el que las dimensiones del objeto (2) son determinadas y en el que, después de la determinación de la longitud o de la anchura del objeto (2) , este objeto (2) es girado con ayuda de un plato rotativo (3) para determinar respectivamente su anchura o su longitud, caracterizado por que este procedimiento presenta las etapas siguientes:
- etapa 1: colocación del objeto (2) por su superficie de base sobre un plato rotativo (3) , - etapa 2: determinación de la longitud o de la anchura de la superficie de base por:
a. desplazamiento del objeto (2) hasta que un primer lado de su superficie de base se coloque a lo largo de una primera línea de referencia (A) ,
b. determinación de la posición del segundo lado de la superficie de base, situado enfrente de este primer lado, por medio de un detector de presencia (5) , siendo definida una segunda línea de referencia (B) paralela a la primera línea de referencia (A) y en contacto con este segundo lado,
c. determinación de la distancia entre la primera línea de referencia (A) y la segunda línea de referencia (B) como longitud o anchura de la superficie de base,
- etapa 3: con ayuda del plato rotativo (3) , rotación del objeto (2) en un ángulo de rotación comprendido entre 45º y 135º , -etapa 4: determinación respectivamente de la anchura o de la longitud de la superficie de base por:
a. desplazamiento del objeto (2) hasta que un tercer lado de su superficie de base se coloque a lo largo de una tercera línea de referencia (C) ,
b. determinación de la posición del cuarto lado de la superficie de base, situado enfrente de este tercer lado,
por medio de un detector de presencia (5) , siendo definida una cuarta línea de referencia (D) paralela a la 35 tercera línea de referencia (C) y en contacto con este cuarto lado, c. determinación de la distancia entre la tercera línea de referencia (C) y la cuarta línea de referencia (D) , respectivamente, como la anchura o la longitud de la superficie de base, y, además, determinación de la altura del objeto (2) con ayuda de un detector de altura (6) .
2. Procedimiento según la reivindicación 1, caracterizado por que el ángulo de rotación es sustancialmente de 90º .
3. Procedimiento según una de las reivindicaciones 1 a 3 inclusive, caracterizado por que la etapa 1 comprende las 45 etapas parciales siguientes:
a. llevar por lo menos parciamente el objeto (2) sobre el plato rotativo (3) ,
b. con ayuda del desplazamiento de dos elementos de desplazamiento (4) que se desplazan simultáneamente, que están previstos a distancia constante uno de otro y que delimitan una zona rectangular más grande que el objeto (2) que se va a medir y posicionar y/o de la rotación del plato rotativo (3) , desplazamiento del objeto
(2) hasta que sea colocado sobre su superficie de base, c. con ayuda del desplazamiento de los elementos de desplazamiento (4) y/o de la rotación del plato rotativo (3) , 55 desplazamiento del objeto (2) hasta que el objeto sea completamente situado sobre el plato rotativo (3) .
4. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que, en la etapa 2a y la etapa 4a, el objeto (2) es desplazado con ayuda de dos elementos de desplazamiento (4) que se desplazan simultáneamente, que están previstos a distancia constante uno de otro y que delimitan una zona rectangular más grande que el objeto (2) que se va a medir y posicionar, siendo los lados de esta abertura rectangular paralelos a la primera línea de referencia (A) y a la tercera línea de referencia (C) , hasta que el primer o tercer lados del objeto sean situados respectivamente a lo largo de la primera línea de referencia (A) o de la tercera línea de referencia (C) .
5. Procedimiento según la reivindicación 4, caracterizado por que, en la etapa 2a y la etapa 4a, el objeto (2) es 65 desplazado con ayuda de los elementos de desplazamiento (4) hasta por encima del centro del plato rotativo (3) y es hecho retroceder a continuación en el sentido opuesto hasta que, respectivamente, su primer lado o tercer lado sea 8
situado a lo largo de la línea central del plato rotativo (3) que sirve respectivamente de primera línea de referencia (A) o de tercera línea de referencia (C) .
6. Procedimiento según las reivindicaciones 4 o 5, caracterizado por que, después de la etapa 2, el objeto (2) es desplazado con ayuda de los elementos de desplazamiento (4) hasta que la superficie de base del objeto (2) sea simétricamente situada con respecto a la primera línea de referencia (A) .
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que, durante las etapas 1 a 4
inclusive, el objeto (2) es identificado con ayuda de unos medios de identificación. 10
8. Procedimiento según la reivindicación 7, caracterizado por que dicha identificación consiste en leer un código de barras previsto sobre el objeto (2) con ayuda de un lector de código de barras.
9. Procedimiento según una de las reivindicaciones anteriores, caracterizado por que si el objeto (2) tiene una
forma paralelepipédica y si la altura medida es más grande que la longitud medida y/o la anchura medida, este procedimiento contiene la etapa suplementaria que consiste en voltear este objeto (2) haciendo girar el objeto (2) con ayuda del plato rotativo (3) y golpear el objeto (2) con ayuda de los elementos de desplazamiento (4) .
10. Procedimiento según una de las reivindicaciones 3 a 9 inclusive, caracterizado por que cuando dichas etapas han sido ejecutadas, el objeto (2) es colocado en el centro del plato rotativo (3) haciendo girar el objeto (2) con ayuda del plato rotativo (3) y/o desplazando el objeto (2) con ayuda de los elementos de desplazamiento (4) , de tal modo que el sentido de la longitud o el sentido de la anchura del objeto (2) sean paralelos a una línea de referencia (A, B, C, D) .
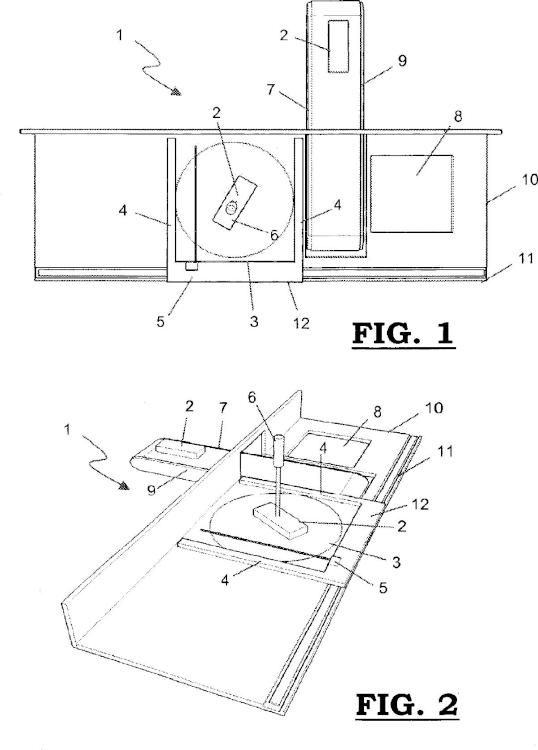
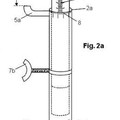
11. Dispositivo (1) de medición y posicionamiento de un objeto (2) en forma de cubo, de paralelepípedo rectángulo, de cilindro o de prisma recto, cuya superficie de base es un polígono regular que tiene un número par de lados por un procedimiento según una de las reivindicaciones 1 a 10 inclusive, caracterizado por que este dispositivo (1) comprende:
a. un dispositivo de llevado (7) que lleva sobre el plato rotativo (3) un objeto (2) que se va a medir y posicionar, b. un plato rotativo (3) , cuyas dimensiones son tales que, durante las etapas 2 a 4 inclusive del procedimiento, el objeto (2) se encuentra sobre este plato rotativo (3) , c. dos elementos de desplazamiento (4) que se desplazan simultáneamente, que están previstos a distancia constante uno de otro y que delimitan una zona rectangular más grande que el objeto (2) que se va a medir y posicionar, y por los cuales este objeto (2) es desplazado, siendo los lados de esta abertura rectangular paralelos a la primera línea de referencia (A) y a la tercera línea de referencia (C) , d. un detector de presencia (5) para detectar la presencia del objeto (2) durante la etapa 2b y la etapa 4b, y e. un detector de altura (6) para determinar la altura del objeto (2) .
12. Dispositivo (1) según la reivindicación 11, caracterizado por que dichos elementos de desplazamiento (4) forman 45 igualmente parte del dispositivo de llevado (7) .
13. Dispositivo (1) según las reivindicaciones 11 o 12, caracterizado por que dichos elementos de desplazamiento (4) forman parte de un bastidor (12) .
14. Dispositivo (1) según una de las reivindicaciones 11 a 13 inclusive, caracterizado por que dicho detector de presencia (5) está previsto fijamente sobre los elementos de desplazamiento (4) .
15. Dispositivo (1) según una de las reivindicaciones 11 a 14 inclusive, caracterizado por que dicho detector de altura (6) está colocado fijamente a una cierta altura por encima del centro del plato rotativo (3) . 55
16. Dispositivo (1) según una de las reivindicaciones 11 a 14 inclusive, caracterizado por que dicho detector de altura (6) previsto sobre los elementos de desplazamiento (4) está situado a una cierta altura por encima del plano del plato rotativo (3) .
17. Dispositivo (1) según una de las reivindicaciones 11 a 16 inclusive, caracterizado por que contiene unos medios de identificación para identificar el objeto (2) .
18. Dispositivo (1) según la reivindicación 17, caracterizado por que dichos medios de identificación comprenden un lector de códigos de barras para identificar el objeto (2) , leyendo un código de barras previsto sobre este objeto (2) .
Patentes similares o relacionadas:
VEHÍCULO AISLADO MONTADO CON PLATAFORMA DE TRABAJO AÉREO Y MÉTODO DE LIMITACIÓN AUTOMÁTICA DE RADIO PARA LA PLATAFORMA DE TRABAJO AISLADA, del 16 de Enero de 2020, de XUZHOU HANDLER SPECIAL VEHICLE CO., LTD: Vehículo aislado montado con plataforma de trabajo aéreo y método de limitación automática de radio para la plataforma de trabajo aislada. Se proporciona […]
MEDIDOR DE POSICIONAMIENTO DE ASIENTOS REGULABLES, del 29 de Noviembre de 2018, de TORRES GIL, Miguel Ángel: La invención se refiere a un conjunto de cuatro piezas plásticas o metálicas a modo de pletina, siendo una de ellas vertical, disponiendo en su parte inferior de un sistema […]
Medir un artículo, del 7 de Septiembre de 2016, de C & J CLARK INTERNATIONAL LIMITED: Un método para medir un objeto tridimensional con un aparato medidor que incluye un par de brazos y un elemento medidor alargado que se extiende […]
Dispositivo de medición con cordón extensible y procedimiento, del 29 de Junio de 2016, de Delta II, I.P., Trust: Un dispositivo de medición que comprende: un cable que incluye: una sección media; y un extremo libre para su colocación por un usuario […]
Dispositivo y procedimiento para determinar la circunferencia de una rueda, del 18 de Mayo de 2016, de MAHA MASCHINENBAU HALDENWANG GMBH & CO. KG: Dispositivo para la determinación de la circunferencia de la rueda, en particular de una rueda de vehículo en un banco de pruebas, con un rodillo […]
 Aparato para medir un artículo, del 11 de Diciembre de 2015, de C & J CLARK INTERNATIONAL LIMITED: Aparato para medir la circunferencia de un artículo, incluyendo el aparato : un par de brazos que son móviles uno con respecto a otro alrededor de […]
Aparato para medir un artículo, del 11 de Diciembre de 2015, de C & J CLARK INTERNATIONAL LIMITED: Aparato para medir la circunferencia de un artículo, incluyendo el aparato : un par de brazos que son móviles uno con respecto a otro alrededor de […]
 DISPOSITIVO DE MEDICIÓN ANTROPOMÉTRICA, del 2 de Julio de 2015, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo de medición antropométrica para medir el diámetro interior de la "circunferencia de agarre", que permite una mayor precisión en la medición […]
DISPOSITIVO DE MEDICIÓN ANTROPOMÉTRICA, del 2 de Julio de 2015, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo de medición antropométrica para medir el diámetro interior de la "circunferencia de agarre", que permite una mayor precisión en la medición […]
 Dispositivo de medida del desplazamiento mamario, del 29 de Diciembre de 2014, de SERVICIO ANDALUZ DE SALUD: Dispositivo de medida del desplazamiento mamario.
El objeto de la presente invención es un nuevo dispositivo de medida del desplazamiento […]
Dispositivo de medida del desplazamiento mamario, del 29 de Diciembre de 2014, de SERVICIO ANDALUZ DE SALUD: Dispositivo de medida del desplazamiento mamario.
El objeto de la presente invención es un nuevo dispositivo de medida del desplazamiento […]