Procedimiento para la caracterización de firmes en carreteras.
La presente invención describe un procedimiento para la obtención de modo semiautomático,
del espesor puntual, promedio y el volumen de cada uno de los firmes que conforman una carretera de nueva construcción. Comprende un sistema LiDAR móvil, responsable de la captura de los datos de las capas de firmes, un sistema de referencia que permite el registro de dichas capas y un programa que realiza el cálculo de los espesores puntuales, promedio y volúmenes asociados.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300342.
Solicitante: UNIVERSIDADE DE VIGO.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ JORGE,HIGINIO, ARIAS SANCHEZ,PEDRO, RIVEIRO RODRÍGUEZ,BELÉN, PUENTE LUNA,Ivan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E01C23/01 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01C CONSTRUCCION O REVESTIMIENTO DE CARRETERAS, CANCHAS DE DEPORTES O SIMILARES; MAQUINAS O ACCESORIOS PARA LA CONSTRUCCION O LA REPARACION (creación de carreteras o superficies similares por compactación o dispersión de la nieve o del hielo E01H). › E01C 23/00 Dispositivos o disposiciones auxiliares para la construcción, la reparación, el reacondicionamiento o la colocación de carreteras o de superficies similares (aparatos para reacondicionar las composiciones no hidráulicas recuperadas E01C 19/10). › Dispositivos o medios auxiliares previos a la colocación de un nuevo revestimiento o para verificar su configuración, p. ej. gálibos, soportes de guías de enrase (carriles-guía E01C 19/50 ); Aplicaciones de aparatos de medida, de indicación del registro de la configuración de una superficie de un revestimiento existente, p. ej. profilógrafos (E01C 23/07 tiene prioridad; medida de la rugosidad o de la irregularidad en general G01B).
- G01B11/03 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la medida de coordenadas de puntos.
- G01F17/00 G01 […] › G01F MEDIDA DEL VOLUMEN, FLUJO VOLUMETRICO, FLUJO MASICO O NIVEL DE LIQUIDOS; DOSIFICACION VOLUMETRICA. › Métodos o aparatos para la determinación de la capacidad de recipientes o cavidades o del volumen de cuerpos sólidos (medida de dimensiones lineales para determinar el volumen G01B).
Fragmento de la descripción:
PROCEDIMIENTO PARA LA CARACTERIZACIÓN DE FIRMES EN
CARRETERAS
ANTECEDENTES DE LA INVENCIÓN
El mantenimiento y conservación de los firmes de carreteras ha sido una constante preocupación de los entes propietarios. La vida útil de un pavimento no sólo se ve afectada por el número de repeticiones de cargas pesadas aplicadas sobre éste, sino que el espesor de sus capas es también un factor determinante de la calidad del mismo. De hecho, una deficiencia en los espesores que constituyen dicho firme puede reducir su vida. Los pavimentos en condiciones no idóneas pueden conllevar un aumento de los costes para los usuarios, mayor probabilidad de choques y retrasos en la carretera.
Durante décadas, el GPR (Ground-Penetrating Radar) ha sido utilizado para investigaciones geofísicas e ingeníenles. Utiliza ondas electromagnéticas con frecuencias entre 100MHz y 2 GHz para determinar las características del subsuelo, basándose en el contraste de las propiedades eléctricas y magnéticas del material a través del cual la onda está viajando. Con tal motivo, la tecnología GPR se ha venido utilizando para detectar huecos o grietas bajo pavimentos o monitorizar el control de calidad de nuevos revestimientos asfálticos. De hecho, existen estudios que demuestran la utilidad del GPR para determinar de manera precisa los espesores de las capas de firme de una carretera [Maser K, Puccinelli J, Amestoy JK. Transportation Research Board Annual Meeting, Washington 2012, USA]
Sin embargo, la tecnología LiDAR (Light Detection and Ranging o Láser Imaging Detection and Ranging) móvil permite capturar información física desde una plataforma móvil (coche, tren, barco, etc) de una manera rápida y segura. Dicha tecnología proporciona datos tridimensionales precisos que pueden ser utilizados por profesionales de ámbitos relacionados con la Ingeniería Civil y Construcción. Representa una alternativa al método tradicional de medida de espesores existente hasta el momento [Loizos A, Plati C. IEEE Sensors Journal 2007, 7:842-50; Saarenketo T, Scullion T. J. Appl. Geophys. 2000, 43:119-38; AL-Qadi IL, Lahouar S. Const. Build. Mat. 2005, 19:763-72; Gordon MO, Broughton K, Hardy MSA. NDT& E International 2006, 39(4):429-38]
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención se refiere a un nuevo procedimiento que permite obtener de manera semi-automática, el espesor puntual, promedio y el volumen de cada uno de los firmes que conforman una carretera de nueva construcción. Con tal motivo, se necesita un sistema LiDAR móvil, un marco o sistema de referencia y software de procesamiento de datos LiDAR.
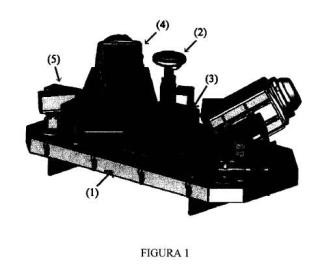
El sistema móvil de inspección (figura 1) seleccionado para este procedimiento es un furgón, en cuya parte superior se apoya una plataforma (1) que integra tres sensores básicos: el sistema de posicionamiento formado por la antena GPS primaria (2) y el sistema inercial (3), los sensores LiDAR (4) y las cámaras RGB (5), estos últimos no se emplean en esta tarea. La tecnología LiDAR permite crear una nube de puntos a partir de muestras geométricas en la superficie del objeto. De esta manera, y tras una etapa de post-procesado, se generan los modelos tridimensionales completos de cada uno de los firmes de la carretera, una vez finalizada la puesta en obra de éstos. Es decir, se requiere una toma de datos programada secuencialmente, en función de la planificación y los tiempos de ejecución de los distintos firmes analizados.
Estos escaneos tienen que ser integrados en un sistema común de referencia mediante, un proceso que se llama generalmente registro (o alineación), y en el que se buscan las transformadas geométricas que referencian las distintas capas de firme a un mismo sistema de coordenadas. De ahí la necesidad de un marco de referencia, que sirva de elemento común para ejecutar el registro.
Una vez obtenidos los modelos tridimensionales completos de cada una de las capas de firme, y tras su registro geométrico, el siguiente paso consiste en el cálculo de espesores y volúmenes. Esta etapa se realiza por completo empleando un algoritmo implementado en MATLAB®, una herramienta informática que surgió para realizar cálculos, especialmente aquellos relacionados con el cálculo matricial. El código utilizado se puede implementar también en C, C++, etc.
Gracias a este procedimiento se consigue mejorar la precisión en los cálculos de espesores y volúmenes frente a la técnica del GPR. Igualmente, permite detectar cálculos fraudulentos al sobredimensionar los materiales de firme utilizados en realidad durante la puesta en obra.
BREVE DESCRIPCION DE LOS DIBUJOS
Para una mejor comprensión de cuanto queda descrito en la presente memoria, se acompañan los siguientes dibujos:
Figura 1. Descripción general de los componentes del sistema móvil de inspección. Figura 2. Registro de las capas de firmes en un mismo sistema de referencia. Cada capa estudiada se representa con un color diferente.
Figura 3. Histograma de espesores generado con la herramienta MATLAB®
Figura 4. Mapa de colores de espesores puntuales de la capa de suelo-cemento.
DESCRIPCIÓN DE UNA REALIZACIÓN PREFERIDA
Un ejemplo ilustrativo de la presente invención se describe a continuación (algoritmo implementado utilizando código MATLAB®).
Ejemplo 1: Autovía de nueva construcción.
El área de estudio seleccionado se encuentra entre los PK. 0+100 - 0+300 de una nueva autovía de la provincia de Ourense. Según la norma 6.1 IC Secciones de firmes, del Ministerio de Fomento Español, dicha autovía se compone de los siguientes firmes con sus correspondientes espesores asociados: suelo cemento (20 cm), capa base (7 cm), capa intermedia (5 cm) y capa de rodadura (3 cm). Este paquete de firmes se coloca sobre una capa teórica de 30 cm de suelo estabilizado.
En este ejemplo, se calcula el espesor promedio y el volumen de la capa de suelo- cemento. El procedimiento, aplicable del mismo modo para el resto de capas, consta de los siguientes pasos:
Cálculo del espesor promedio:
1. Se importan los modelos tridimensionales de la capa de suelo estabilizado y suelo-cemento.
2. Se generan valores interpolados para cada una de las capas, de manera que ambas capas tengan los mismos pares de coordenadas X, Y.
3. Se calcula las diferencias de cota para cada par de puntos X, Y. Este resultado representa el espesor puntual de la capa de suelo-cemento.
4. Finalmente se calcula el espesor promedio y la desviación estándar del cálculo (Tabla 1). Se acompaña el resultado con un histograma (Figura 3).
Tabla 1. Algoritmo para el cálculo del espesor promedio de una capa de firme
* carf* de fichero «w» datos de capa
de fina» 1 (suelo estabilizado)
de finas 2 (suelocesBent©}
capal-load(* sueleestabilizado_suelo.ext');
capa2«load (' su«loc*»ento_auelo. txt');
I Asignación de coordenadas caps l y capa 2 xl«capal(1:length(capal),1)j x2*capa2(1:length(capa2),1); yl-capal(1:length(capal),2); y2=capa2(1¡length<capa2),2); zl=capal(1:length(capal),3); z2=capa2(1:length(capa2),3);
% Creación de una función para.< *.* rpolar lo# valores de la capa 1. y 2 flvTriScattexredXnterp (xl, yl, zl); f2*TriScattered!nterp(x2,y2,z2);
I di-culo de valores de 2 interpolados Siint-fl<x2,y2);s2int=f2(x2,y2);dz*z2ínt-zlint;
% Estadística del resultado «mean <dz); s*std(dz);
I Eis«ogx«HK figure;
hi s t <dz,100) ;xlabel(* Favement thickneas (m)'); xlimí(0 0.5});
El espesor promedio de la capa es 0.184476 m La desviación estándar de la capa es 0.021378 m
Cálculo del volumen:
1. Se genera un grid o malla (X, Y) con una resolución de 0,1 *0,1 m. (puede modificarse) que se superpone sobre cada capa.
2. Se calculan los valores de Z para cada capa inicialmente interpolada que corresponden a las coordenadas X, Y del grid.
3. A continuación se calcula la diferencia de coordenadas Z. Se acompaña este cálculo de un mapa de colores donde se representan los espesores puntuales de cada capa de suelo-cemento.
4. Por último se calcula el volumen contenido entre las dos capas, que equivale al volumen de suelo-cemento en el tramo analizado (Tabla 2).
Tabla 2. Algoritmo para el cálculo del volumen de una capa de firme
% Creación de un grid
k=0.1; % Resolución del grid. Se tonu§ una malla común para las
[X2,Y2]=meshgrid(min(x2):k:max(x2),min(y2):k:max(y2));
% Obtención de valores de Z en función de los objetos de
interpolación
Zl=fl(X2,Y2);
Z2=f2(X2,Y2);
% Diferencia de coordenadas 7, dZ=Z2-Zl;
% Gráfico 2D de espesores de firme de capa 2...
Reivindicaciones:
1. Procedimiento para la caracterización de firmes de carreteras, que comprende las siguientes etapas para el cálculo de espesores y/o volúmenes:
a) Toma secuencial de las coordenadas globales de unas capas de firme mediante un sistema LiDAR móvil.
b) Transformación de las coordenadas globales de las capas de firme en un mismo sistema de coordenadas cartesianas, local y común, generándose los modelos tridimensionales para cada capa.
c) Generación de valores interpolados de la Z medida para cada una de las coordenadas cartesianas de las capas analizadas, de manera que dichas capas tengan los mismos pares de coordenadas X, Y.
d) Cálculo de las diferencias de cota para cada par de puntos X, Y interpolados. Este resultado representa el espesor puntual de la capa analizada.
e) Finalmente se calcula el espesor promedio y la desviación estándar del cálculo.
2. Procedimiento para la caracterización de firmes en carreteras, según reivindicación 1, caracterizado porque después de la etapa c), se añaden las siguientes etapas específicas al procedimiento para el cálculo del volumen:
f) Se genera un grid o malla (X, Y) con una resolución de a * a m2 que se superpone sobre cada capa.
g) Se calculan los valores de la coordenada Z correspondientes a cada celda del grid generado, empleando para ello la función interpoladora de la etapa c) de la reivindicación 1.
h) A continuación se calcula la diferencia de cota para cada celda del grid, al igual que la etapa d) de la reivindicación 1. Se acompaña este cálculo de un mapa de colores donde se representan los espesores puntuales de cada capa.
i) Por último se calcula el volumen contenido entre las dos capas, que equivale al volumen de la capa en el tramo analizado.
3. Procedimiento para la caracterización de firmes en carreteras, según reivindicación 2, caracterizado porque la malla para el cálculo del volumen tiene por a = 0.1 m, no limitando la invención a esta resolución en particular.
4. Sistema móvil para la caracterización de firmes, caracterizado por comprender
una plataforma (1) que integra tres sensores básicos: un sistema de posicionamiento formado por la antena GPS primaria (2) y el sistema inercial (3), los sensores LiDAR (4) y las cámaras RGB (5), asociados a un procesador que ejecuta las etapas b), c), d) y e) de la reivindicación 1 y f), g), h) e i) de la 10 reivindicación 2.
Patentes similares o relacionadas:
Nivel, del 23 de Marzo de 2020, de CABALLERO UCHA, Fernando: 1. Nivel, del tipo formado por un vástago y una varilla perpendicular de nivelación montada en un soporte deslizante sobre el vástago […]
Procedimiento para determinar la calidad de un pavimento de asfalto de nueva producción, del 10 de Abril de 2019, de CA Konsult: Procedimiento para determinar la calidad de un pavimento asfáltico, comprendiendo el procedimiento las etapas de: a) proporcionar e inicializar al menos un sensor […]
Procedimiento para la medición de espesores y volúmenes de hormigón proyectado en taludes de nueva construcción, reforzados con bulones, mediante datos Lidar terrestre, del 23 de Enero de 2018, de UNIVERSIDAD DE VIGO: La presente invención describe un procedimiento para la obtención de modo semi-automático, del espesor puntual, promedio y el volumen real del hormigón proyectado […]
 MEDIDOR CONTINUO DE DRENABILIDAD Y PERMEABILIDAD IN-SITU PARA PAVIMENTOS DE CARRETERA, del 22 de Diciembre de 2015, de CENTRO DE ESTUDIOS DE MATERIALES Y CONTROL DE OBRA, S.A: Medidor continuo de drenabilidad y permeabilidad in-situ para pavimentos de carretera.
La invención consiste en un sistema de auscultación de pavimentos de carretera […]
MEDIDOR CONTINUO DE DRENABILIDAD Y PERMEABILIDAD IN-SITU PARA PAVIMENTOS DE CARRETERA, del 22 de Diciembre de 2015, de CENTRO DE ESTUDIOS DE MATERIALES Y CONTROL DE OBRA, S.A: Medidor continuo de drenabilidad y permeabilidad in-situ para pavimentos de carretera.
La invención consiste en un sistema de auscultación de pavimentos de carretera […]
 Método de trabajar una superficie de carretera de revestimiento bituminoso a una microrrugosidad deseada y una macrorrugosidad deseada, del 27 de Noviembre de 2015, de BRIDGESTONE CORPORATION: Un método de trabajar una superficie de carretera de revestimiento bituminoso a una microrrugosidad deseada μRTARGET) y una macrorrugosidad deseada (MRTARGET);
incluyendo […]
Método de trabajar una superficie de carretera de revestimiento bituminoso a una microrrugosidad deseada y una macrorrugosidad deseada, del 27 de Noviembre de 2015, de BRIDGESTONE CORPORATION: Un método de trabajar una superficie de carretera de revestimiento bituminoso a una microrrugosidad deseada μRTARGET) y una macrorrugosidad deseada (MRTARGET);
incluyendo […]
 DISPOSITIVO DE SUJECIÓN DE ANTENAS GEO-RADAR EN GANCHO DE REMOLQUE DE VEHÍCULOS PARA LA EVALUACIÓN DE PAVIMENTOS, del 28 de Mayo de 2013, de UNIVERSIDADE DE VIGO: La presente invención se refiere a un soporte de sujeción de antenas geo-radar apantalladas al gancho de remolque de vehículos para adquisición […]
DISPOSITIVO DE SUJECIÓN DE ANTENAS GEO-RADAR EN GANCHO DE REMOLQUE DE VEHÍCULOS PARA LA EVALUACIÓN DE PAVIMENTOS, del 28 de Mayo de 2013, de UNIVERSIDADE DE VIGO: La presente invención se refiere a un soporte de sujeción de antenas geo-radar apantalladas al gancho de remolque de vehículos para adquisición […]
SISTEMA DE INSPECCION DE DETERIORO DE PAVIMENTO DE CARRETERA., del 16 de Enero de 2007, de THE ROADS AND TRAFFIC AUTHORITY OF NEW SOUTH WALES COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Sistema para adquirir, procesar, almacenar, analizar y reportar datos referentes al estado de una carretera u otra superficie pavimentada en tiempo real; incluyendo […]
 PROCEDIMIENTO E INSTRUMENTO PARA CARACTERIZAR UNA SUPERFICIE DE PISADO, POR EJEMPLO UNA SUPERFICIE DE CESPED SINTETICO, del 16 de Noviembre de 2007, de MONDO S.P.A.: Un procedimiento para caracterizar una superficie (S) de pisado, comprendiendo el procedimiento las operaciones de: - dejar caer un peso desde una altura […]
PROCEDIMIENTO E INSTRUMENTO PARA CARACTERIZAR UNA SUPERFICIE DE PISADO, POR EJEMPLO UNA SUPERFICIE DE CESPED SINTETICO, del 16 de Noviembre de 2007, de MONDO S.P.A.: Un procedimiento para caracterizar una superficie (S) de pisado, comprendiendo el procedimiento las operaciones de: - dejar caer un peso desde una altura […]