Dispositivo móvil para la realización de modelos tridimensionales de espacios interiores.
La presente invención se refiere a un dispositivo móvil para mapeado geométrico de edificios,
que utiliza dos odómetros para la obtención de datos de trayectoria, fundamentalmente distancia recorrida y giros, y un láser escáner para la obtención de geometría en coordenadas polares. Debido a la sincronización existente entre los datos de trayectoria y los datos de coordenadas polares, se puede obtener un modelo geométrico tridimensional. El sistema posee un microcontrolador para la gestión de los datos de los odómetros y una batería para la alimentación de todos los sistemas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200626.
Solicitante: UNIVERSIDADE DE VIGO.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ JORGE,HIGINIO, ARMESTO GONZALEZ,JULIA, LAGUËLA LOPEZ,Susana, ROCA BERNÁRDEZ,David, GESTO DÍAZ,Manuel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01B11/03 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la medida de coordenadas de puntos.
- G01B11/14 G01B 11/00 […] › para la medida de la distancia o la separación entre objetos espaciados o entre aberturas espaciadas (G01B 11/26 tiene prioridad; telémetros G01C 3/00).
Descripción:
DISPOSITIVO MÓVIL PARA LA REALIZACIÓN DE MODELOS TRIDIMENSIONALES DE ESPACIOS INTERIORES
Sector de la técnica La siguiente invención tiene aplicación en la obtención de información geométrica tridimensional de edificios y espacios interiores en general. La obtención de información geométrica tridimensional de los edificios una vez construidos resulta fundamental para tener un registro con información real acerca de las dimensiones finales de los mismos. Esto permite comprobar la calidad de la construcción ejecutada y su cumplimiento con las tolerancias prefijadas, así como posibilitar la generación de modelos geométricos que sirvan de soporte para los modelos de información de edificios y espacios industriales, cada vez más utilizados para realizar una gestión eficiente de los mismos Estado de la técnica .
Existen diversas técnicas para obtener información geométrica de edificios, como pueden ser los instrumentos topográficos convencionales (estaciones totales) , fotogrametría o sistemas de escaneado láser. En los últimos años los sistemas basados en láser escáner se están mostrando como los más competitivos para estas tareas, debido a que su coste económico ha bajado considerablemente y a que permiten medir una gran densidad de puntos y alcanzar una gran resolución espacial. Estos sistemas pueden funcionar de forma estática o móvil (JP20010 12906A, DE4445464A) . En el primer caso se generan modelos tridimensionales parciales del edificio que a posteriori se deben registrar para obtener un único modelo del mismo. Esta técnica es la que se viene utilizando en la actualidad, no solo para el escaneado de edificios, sino que también para el escaneado de otros elementos como túneles, interior de fábricas o barcos (Fakete S., Diederichs M., y Lato M., Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels, Tunnelling and underground space technology 25 (5) (2010) 614 -628; Roca-Pardiñas J., López-Alvarez F., Ordoñez c., Mendez A., y Bemardo-Sánchez A., Terrestrial laser scanning used to detect asymmetries in boat hulls, Optical Engineering 51 (1) , artículo número 013605) . La problemática que presenta es su baja productividad debido a la necesidad de montar gran cantidad de estaciones para completar la adquisición de datos.
Durante los últimos años se han desarrollado técnicas para el escaneado de edificios que combinan sistemas de navegación con láser escáner (sistemas móviles) . Los sistemas de navegación para interiores carecen de posicionamiento basado en satélites por lo que se basan típicamente en una navegación realizada mediante estimaciones en base a datos registrados por sensores inerciales, que da lugar a elevadas derivas posicionales a medida que se incrementa el tiempo de escaneo. Para tratar de disminuir dichas derivas se implementan sensores inerciales basados en dispositivos de fibra óptica o anillos láser que tienen el inconveniente del elevado precio que presentan.
Descripción de la invención El sistema aquí desarrollado permite obtener de manera automática modelos tridimensionales de edificios empleando instrumentación de bajo coste para la navegación y un sistema láser escáner, formando un sencillo dispositivo mecánico.
El conjunto se compone de un carro equipado con tres o cuatro ruedas, de forma que las dos delanteras son giratorias y permiten realizar cambios de dirección. La misma función puede ser realizada por una sola rueda giratoria. Cada una de las ruedas traseras están ensambladas a un odómetro incremental para la medición de la distancia recorrida. El láser escáner se sitúa en la parte frontal del dispositivo de forma que el haz láser es perpendicular a la dirección de avance del sistema efectuando un barrido circular del espacio interior. La función de escaneado también puede mejorarse utilizando simultáneamente dos láseres scaner posicionados de forma oblicua al avance. Los sistemas láser escáner disponen típicamente de una salida de datos para ordenador. El registro de datos de los sensores (láser escáneres y odómetros) se realiza a través de un microcontrolador y/o un ordenador portátil que centraliza toda la información. Todos los componentes eléctricos son alimentados por una batería utilizando cableado. El microntrolador se encarga del cuenteo de pulsos de los dos odómetros y almacenar la información de la trayectoria. Esta trayectoria, la distancia total recorrida y giros se obtienen a partir de la información de los odómetros. Los odómetros están sincronizados con la adquisición de datos láser, de forma que se puede establecer una correlación entre los datos geométricos medidos por el escáner en coordenadas polares y la trayectoria medida, para la obtención así de una geometría tridimensional.
Resulta necesaria una calibración del sistema antes de realizar las mediciones. Esta calibración consta de dos fases: una de calibración del sistema de medida del desplazamiento, y otra de calibración de los distintos sensores que conforman el sistema. La primera consiste en determinar la relación entre el número de pulsos de cada rueda y la distancia recorrida. Una vez determinado este factor de conversión se puede evaluar la distancia recorrida por el sistema, así como los giros efectuados. Para esta última parte se emplea trigonometría básica, asumiendo que el suelo del edificio está nivelado horizontalmente, lo que ocurre en la mayoría de las ocasiones. La segunda fase para la calibración cosiste en calcular la matriz de traslación rotación que relaciona el origen de coordenadas del sistema láser escáner con el origen de coordenadas del sistema, que se encuentra en el centro del eje de las ruedas traseras del vehículo.
La principal ventaja que presenta esta invención consiste en que permitirá de una forma sencilla la toma de modelos tridimensionales de interiores de edificios empleando un sistema de bajo coste y alta calidad metrológica.
Breve descripción del contenido de las figuras Para una mejor comprensión de cuanto queda descrito en la presente memoria, se acompañan los siguientes dibujos.
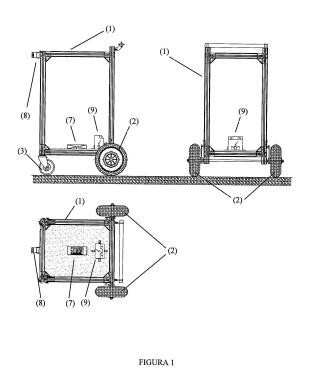
La figura 1 muestra una vista general del sistema para la realización de modelos tridimensionales de interiores de edificios en la que se observan sus componentes principales, que son una estructura de aluminio y madera que actúa como soporte principal, dos ruedas neumáticas traseras con poleas incorporadas, dos odómetros anclados a la estructura también con poleas incorporadas, correas de transmisión rueda -odómetro, un microcontrolador, un láser escáner y una batería para alimentación .
La figura 2 muestra en detalle de la unión entre los odómetro y las ruedas traseras a través de poleas y correas de transmisión.
Realización preferente de la invención El sistema para la obtención de modelos tridimensionales de interiores de edificios cuenta con una estructura principal (1) realizada en perfilería de aluminio y madera que sirve como soporte para el anclaje de los diferentes elementos utilizados. En la parte trasera se ubican dos ruedas de goma neumática (2) y en la parte delantera dos
ruedas de goma maciza (3) , de menor tamaño y que permiten la realización de giros. Los odómetro (4) utilizados para la medición de la distancia recorrida por cada una de las ruedas traseras y los correspondientes giros del sistema van ensamblados a la perfilería de aluminio (1) . Tanto las ruedas traseras (2) como los odómetro (4) llevan pegados sendos juegos de poleas (5) que giran de forma solidaria a ellos. La 10 transmisión mecánica entre dichos juegos de poleas (5) se realiza a través de una correa de transmisión (6) , que es la encargada de transmitir el movimiento mecánico de cada una de las ruedas traseras al odómetro. La adquisición de datos de los odómetros (4) se realiza a través de un microcontrolador (7) ubicado en la parte inferior de la plataforma móvil. Existe un cable de transmisión de datos para tal 15 efecto. El láser escáner (8) se ubica en la parte frontal ensamblado a la perfilería de aluminio (1) , de forma que el haz del láser forma un ángulo de 90° en este caso con la dirección de avance del vehículo. Los datos de geometría generados por el láser escáner se almacenan en el microcontrolador, aunque también se puede utilizar un ordenador complementario para tal efecto. La alimentación eléctrica de todo el
sistema (láser escáner, odómetros y microncontrolador) se realiza a través de una batería (9) ubicada sobre la tabla de la estructura principal, al lado del microcontrolador.
Reivindicaciones:
1. Dispositivo móvil para la realización de modelos tridimensionales de espacios interiores caracterizado por comprender una estructura equipada con una o dos ruedas giratorias en la parte delantera, con dos ruedas en la parte trasera conectados a sendos odómetros para la medición de la distancia recorrida, dicha estructura dispone bien de un láser escáner que realiza un barrido en dirección perpendicular a la de avance o bien de dos láseres escáner alineados en un ángulo oblicuo al avance que registran información complementaria, para el almacenamiento de los datos de los odómetros y los láseres se utiliza un microcontrolador o un ordenador, los componentes eléctricos se encuentran conectados a una fuente de alimentación eléctrica para su funcionamiento.
2. Dispositivo móvil para la realización de modelos tridimensionales de espacios interiores, según reivindicación 1 caracterizado por una estructura con la forma que forman las aristas de un cubo y está realizada en perfilería de aluminio y madera.
3. Dispositivo móvil para la realización de modelos tridimensionales de espacios interiores, según reivindicaciones 1 y 2 caracterizado por comprender ruedas traseras y odómetros que llevan sujetos sendos juegos de poleas que giran de forma solidaria a ellos. La transmisión mecánica entre dichos juegos de poleas se realiza a través de una correa de transmisión.
. Dispositivo móvil para la realización de modelos tridimensionales de espacios interiores, según reivindicaciones 1-3 caracterizado por comprender un motor que permite su desplazamiento de modo autónomo .
/ (1)
(1)
'~
(8)
(8) (7) (9)
FIGURA 1
(2)
(4)
(6)
'"
(2) (5)
(5)
(1)
FIGURA 2
Patentes similares o relacionadas:
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende: a) un primer sensor de dirección espacial […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Detección de posición, del 18 de Marzo de 2020, de Airbus Operations Limited: Aparato para determinar la posición de un objeto que tiene uno o más elementos magnéticos , el aparato comprende una […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
PROCEDIMIENTO DE CARACTERIZACION DE ELEMENTOS REFLECTORES A PARTIR DE LOS HACES DE LUZ REFLEJADOS EN LOS MISMOS, del 27 de Enero de 2020, de FUNDACION CENER-CIEMAT: Dispositivo, sistema y procedimiento de caracterización de elementos reflectores a partir de los haces de luz reflejados en los mismos y en […]