Métodos y aparato para un pasador o elemento de sujeción instrumentado.
Un pasador o elemento de sujeción instrumentado (130) que comprende:
un cuerpo de pasador o elemento de sujeción (202) que tiene un primer extremo y un segundo extremo;
una fuente de energía (220) dentro del cuerpo del pasador o elemento de sujeción;
un controlador (230) dentro del cuerpo del pasador o elemento de sujeción, estando el controlador acoplado eléctricamente a la fuente de energía; una primera fuente de luz (210) fijada al primer extremo del cuerpo del pasador o elemento de sujeción y acoplada comunicativamente al controlador, estando configurada la primera fuente de luz para producir una primera baliza luminosa (132A) a lo largo de una primera dirección y sentido cuando está activada;
en el que el controlador está configurado para activar la primera fuente de luz de tal manera que la primera baliza luminosa incluya información relativa al pasador o elemento de sujeción instrumentado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08156872.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Sarh,Branko, Asada,Harry.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B21/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
- G05B19/401 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por disposiciones de control para la medida, p. ej. calibración e inicialización, medida de la pieza de trabajo con fines de mecanizado (G05B 19/19 tiene prioridad).
PDF original: ES-2383839_T3.pdf
Fragmento de la descripción:
Métodos y aparato para un pasador o elemento de sujeción instrumentado.
CAMPO TÉCNICO Las realizaciones descritas aquí se refieren en general al ensamblaje y ensayo de estructuras, y más particularmente se refieren a métodos y aparato para proporcionar información relativa a la situación y orientación de un sistema de ensamblaje con respecto a dichas estructuras usando pasadores o elementos de sujeción inteligentes.
ANTECEDENTES Durante el ensamblaje de estructuras de la célula de un avión y otras estructuras como las del tipo de cajón -en la que una porción de un sistema de ensamblaje opera en el exterior de la estructura y otra porción del sistema de ensamblaje opera en el interior de la estructura-resulta deseable para los diversos componentes del sistema de ensamblaje que éstos sean situados y alineados con precisión, facilitando la actuación sincronizada de las tareas de ensamblaje. Dichas tareas incluyen, por ejemplo, instalar remaches y otros pasadores o elementos de sujeción, tareas que pueden ser realizadas manualmente o mediante el uso de sistemas de ensamblaje automatizados.
En los sistemas de ensamblaje automatizados, se genera y mantiene de preferencia información detallada con respecto a la localización y orientación del sistema de ensamblaje y sus diversos efectores terminales con respecto a la estructura. Un método común de abordar este problema de disposición incluye coordinar la posición del sistema de ensamblaje interno y externo usando pasadores o elementos de sujeción "tack", que son instalados en interfaces estructurales para estabilizar componentes durante el ensamblaje. La localización de estos pasadores o elementos de sujeción puede ser detectada por las porciones interiores y exteriores del sistema de ensamblaje usando cámaras de sistemas de visión convencionales.
Otra técnica común incluye el uso de un imán pequeño, que puede ser situado dentro de un orificio del componente estructural interno, junto con un buscador de centroides de imanes que es desplazado a lo largo de la superficie exterior hasta que el centro (o sea, el imán) es localizado. Una "X" u otro indicador similar es marcada a continuación en la superficie, que es identificada seguidamente por una cámara de sistema de visión situada en la porción externa de la unidad de ensamblaje.
Dichos sistemas, sin embargo, son un tanto imprecisos y proporcionan generalmente sólo una guía de dos dimensiones (por ejemplo, posición x e y) . Además, dichas tacks pasivas no están configuradas para identificar la localización estructural en la que están situadas.
El documento US 2001/0024283 se refiere a un sistema para identificar la posición de una máquina tridimensional en un bastidor de referencia fijo en el que manguitos aplicados a una superficie son aplicados con emisores que emiten un código predeterminado que permite que los manguitos sean identificados, con lo que a partir de ese momento pueden deducirse las coordenadas de un punto asociado con la superficie.
El documento US 2003/0038933 se refiere a un sistema de calibración en el que objetivos ópticos tales como una fuente óptica y un objetivo de difusión están fijados a una superficie de calibración.
De acuerdo con esto, es deseable proporcionar pasadores o elementos de sujeción y métodos de alineación mejorados para dichos pasadores o elementos de sujeción durante las operaciones de unión y de ensayo. Otras propiedades y características deseables de las diversas realizaciones se harán aparentes en la siguiente descripción detallada y en las reivindicaciones adjuntas, tomadas junto con los dibujos que se acompañan y el campo técnico y antecedentes precedentes.
SUMARIO BREVE El invento se expone en las reivindicaciones independientes. Las características preferidas u opcionales se exponen en las reivindicaciones dependientes.
Se proporcionan métodos y aparato para métodos de ensamblaje mejorados que usan pasadores o elementos de sujeción inteligentes. En una realización, un pasador o elemento de sujeción instrumentado (por ejemplo, un pasador o elemento de sujeción "tack") incluye una o más fuentes de luz (por ejemplo, diodos emisores de luz) configuradas para producir una baliza luminosa que codifica información relativa al pasador o elemento de sujeción instrumentado (por ejemplo, el número de parte) , en las que la dirección de la baliza luminosa puede ser usada para alinear sistemas de ensamblaje externos y/o internos con el pasador o elemento de sujeción instrumentado. La baliza luminosa puede ser activada automáticamente, o por medio de una instrucción recibida de un sistema externo. En el contexto del ensamblaje de un avión, una pluralidad de dichos pasadores o elementos de sujeción puede ser fijada a una o más partes de la célula y usada para ensamblar autónomamente las diversas estructuras.
DESCRIPCIÓN BREVE DE LOS DIBUJOS Se describen aquí varias realizaciones junto con las figuras de los dibujos siguientes, en las que se usan los mismos números de referencia para indicar los mismos elementos.
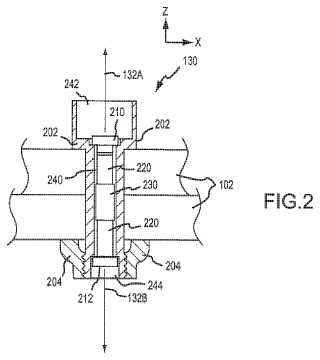
La Figura 1 es una vista isométrica parcial de un corte de un ensamblaje útil para describir varias realizaciones. La Figura 2 es una vista conceptual en corte transversal de un pasador o elemento de sujeción instrumentado de acuerdo con una realización ejemplar. La Figura 3 es un diagrama de bloques esquemático de un pasador o elemento de sujeción instrumentado ejemplar. La Figura 4 es una ilustración de un método para usar un pasador o elemento de sujeción instrumentado ejemplar.
DESCRIPCIÓN DETALLADA En general, las diversas realizaciones descritas aquí se refieren a una forma de pasador o elemento de sujeción inteligente que ayuda a guiar un sistema de ensamblaje a una posición y alineación apropiadas. Más particularmente, haciendo referencia a la Figura 1, una tarea de ensamblaje ejemplar incluye la unión de uno o más componentes de una estructura 102. En esta figura, se muestra con líneas a trazos una "piel" o chapa 104 de la estructura del tipo de cajón, y generalmente define una región interior 105 y una región exterior 103. Se ha de entender que las vigas, orificios y otros componentes particulares mostrados en la Figura 1 son meramente ejemplares, y de ninguna manera limitan el alcance de las realizaciones aplicables.
En la Figura 1 se muestran dos porciones de un sistema de ensamblaje: una porción externa 110, y una porción interna 120. Para facilitar la referencia, se denomina aquí a estos dos sistemas como "sistema de ensamblaje externo" 110 y "sistema de ensamblaje interno" 120, respectivamente, incluso aunque en la práctica pueden ser sistemas independientes o dos partes del mismo sistema. Cada sistema de ensamblaje 110 incluye típicamente varios efectores terminales, actuadores, y/o herramientas configuradas para realizar la tarea a mano, y están también aplicados típicamente a un dispositivo robotizado y a un sistema de ordenador asociado (no mostrado en la Figura 1) .
Un número de pasadores o elementos de sujeción instrumentados (o simplemente "pasadores o elementos de sujeción") 130 han sido aplicados a la estructura 102 en varios puntos. En la realización ilustrada, se muestran cinco de dichos pasadores o elementos de sujeción (130A, 130B, 130C, 130D, y 130E) . Para ilustrar la operación de las diversas realizaciones, se supone que estos pasadores o elementos de sujeción 130 son pasadores o elementos de sujeción "tack" -o sea, pasadores o elementos de sujeción que ayudan a estabilizar temporalmente la estructura 102, y que son sustituidos por un segundo tipo de pasador o elemento de sujeción, probablemente más resistente, más permanente, y que ayuda en la instalación de dichos pasadores o elementos de sujeción de tipo permanente en orificios adyacentes. Alternativamente, los pasadores o elementos de sujeción 130 pueden ser pasadores o elementos de sujeción permanentes.
Resulta deseable que el sistema de ensamblaje interno 120 y el sistema de ensamblaje externo 110 trabajen sincronizadamente para localizar cada pasador o elemento de sujeción 130 y se alineen ellos mismos correctamente de tal manera que cualquier tratamiento posterior puede ser realizado con precisión -por ejemplo, entre dos pasadores o elementos de sujeción tack adyacentes o cercanos. El entorno ilustrado en la Figura 1 muestra el sistema de ensamblaje interno 120 situado por encima del pasador o elemento de sujeción 130B, y el sistema de ensamblaje externo 110 situado por debajo del pasador o elemento de sujeción 130B.
... [Seguir leyendo]
Reivindicaciones:
1. Un pasador o elemento de sujeción instrumentado (130) que comprende:
un cuerpo de pasador o elemento de sujeción (202) que tiene un primer extremo y un segundo extremo; una fuente de energía (220) dentro del cuerpo del pasador o elemento de sujeción; un controlador (230) dentro del cuerpo del pasador o elemento de sujeción, estando el controlador acoplado eléctricamente a la fuente de energía; una primera fuente de luz (210) fijada al primer extremo del cuerpo del pasador o elemento de sujeción y acoplada comunicativamente al controlador, estando configurada la primera fuente de luz para producir una primera baliza luminosa (132A) a lo largo de una primera dirección y sentido cuando está activada; en el que el controlador está configurado para activar la primera fuente de luz de tal manera que la primera baliza luminosa incluya información relativa al pasador o elemento de sujeción instrumentado.
4. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que la primera baliza luminosa (132A) incluye información que utiliza un flujo de bits en serie que comprende una o más palabras 25 digitales. 5. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que la primera baliza luminosa (132A) incluye información relativa a la identificación de parte del pasador o elemento de sujeción instrumentado. 6. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que la primera fuente de luz (210) es un diodo emisor de luz. 7. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que el primero o el segundo extremo del cuerpo del pasador o elemento de sujeción (202) están roscados y configurados externamente para recibir una tuerca (204) correspondiente. 8. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que la fuente de energía (220) es una batería. 9. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que el cuerpo del pasador o elemento de sujeción (202) tiene un diámetro de aproximadamente entre 3, 81 y 12, 7 mm. 10. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, en el que el controlador (230) 45 está configurado para activar la primera fuente de luz (210) en respuesta a una orden externa. 11. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 10, en el que el controlador (230) está configurado para recibir la orden externa de un sistema de ensamblaje. 50 12. Un método para alinear un sistema de ensamblaje, el método comprende: fijar un pasador o elemento de sujeción instrumentado (130) de acuerdo con una de las reivindicaciones precedentes a una estructura (410) , estando configurado el pasador o elemento de sujeción instrumentado para producir una primera baliza luminosa (132A) a lo largo de una primera dirección y sentido cuando está 55 activada, en el que la primera baliza luminosa incluye información relativa al pasador o elemento de sujeción instrumentado; detectar, en un sistema de ensamblaje, la primera baliza luminosa; y alinear el sistema de ensamblaje adyacente al pasador o elemento de sujeción instrumentado basándose en la dirección y sentido de la primera baliza luminosa (440) . 13. El método de la reivindicación 12, que incluye además, después del paso de alineación, utilizar el sistema de ensamblaje para sustituir el pasador o elemento de sujeción instrumentado (130) por un pasador o elemento de sujeción permanente (460) . 14. El método de la reivindicación 12, en el que el pasador o elemento de sujeción instrumentado (130) está configurado además para producir una segunda baliza luminosa (132B) a lo largo de una segunda dirección y sentido diametralmente opuesto al sentido de la primera dirección, y en el que el paso de alineación incluye además alinear una porción externa (110) del sistema de ensamblaje basándose en la primera dirección y sentido de la primera baliza luminosa (132A) , y alinear una porción interna (120) del sistema de ensamblaje basándose en la segunda dirección y sentido de la segunda baliza luminosa (132B) . 15. El método de la reivindicación 12, que incluye además: enviar una instrucción (420) al pasador o elemento de sujeción instrumentado (130) ; y activar el pasador o elemento de sujeción instrumentado en respuesta a la instrucción. 16. Un método para ensamblar un avión, comprendiendo el método el método de alinear un sistema de ensamblaje de la reivindicación 12, en el que la estructura es una estructura de la célula del avión, estando el pasador o elemento de sujeción instrumentado para producir, cuando está activado, una primera baliza luminosa (132A) a lo largo de una primera dirección y sentido, y una segunda baliza luminosa (132B) a lo largo de una segunda dirección y sentido diametralmente opuesto a la primera dirección y sentido, en el que la primera y la segunda balizas luminosas incluyen información relativa al pasador o elemento de sujeción instrumentado; en el que los pasos de detección comprenden detectar (430) , en una porción externa (110) de un sistema de ensamblaje, la primera baliza luminosa; detectar (430) , en una porción interna (120) del sistema de ensamblaje, la segunda baliza luminosa; y en el que el paso de alineación comprende alinear (440) la porción externa del sistema de ensamblaje adyacente al pasador o elemento de sujeción instrumentado basándose en la primera dirección y sentido de la primera baliza luminosa; y alinear (440) la porción interna del sistema de ensamblaje adyacente al pasador o elemento de sujeción instrumentado basándose en la segunda dirección y sentido de la segunda baliza luminosa. 17. El método de la reivindicación 16, que incluye además, después del paso de alineación, utilizar (460) las porciones externas (110) e internas (120) del sistema de ensamblaje para sustituir el pasador o elemento de sujeción instrumentado (130) por un pasador o elemento de sujeción permanente. 18. El método de la reivindicación 16, que incluye además: enviar una instrucción (420) al pasador o elemento de sujeción instrumentado (130) ; y activar el pasador o elemento de sujeción instrumentado en respuesta a la instrucción. 19. El método de la reivindicación 16, en el que alinear (440) la porción externa del sistema de ensamblaje (110) incluye alinear un efector terminal que presenta cuatro grados de libertad. 20. El método de la reivindicación 16, en el que alinear (440) la porción externa del sistema de ensamblaje (110) incluye determinar un número de parte del pasador o elemento de sujeción instrumentado (130) basándose en la información incluida en la primera baliza luminosa. 15 2. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 1, que incluye además una segunda fuente de luz (212) fijada al segundo extremo del cuerpo del pasador o elemento de sujeción (202) y acoplada comunicativamente al controlador (230) , estando configurada la segunda fuente de luz para producir una segunda baliza luminosa (132B) a lo largo de una segunda dirección y sentido cuando está activada.
20 3. El pasador o elemento de sujeción instrumentado (130) de la reivindicación 2, en el que el sentido de la primera dirección y el sentido de la segunda dirección son sustancialmente diametralmente opuestos.
Patentes similares o relacionadas:
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Punta para un escáner óptico, del 25 de Diciembre de 2019, de 3SHAPE A/S: Una punta para un escáner 3D, en donde la punta comprende: - un armazón de punta , donde una primera parte (605a) del armazón comprende un primer material […]
Malla adaptativa de resolución para realizar metrología en 3-d de un objeto, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un metodo (200, 200') para generar una malla adaptativa de resolucion para la metrologia 3-D de un objeto , que comprende: recibir […]
Dispositivo de medición y procedimiento para la medición por triangulación, del 5 de Junio de 2019, de Pepperl+Fuchs AG: Dispositivo de medición para la medición por triangulación, que presenta - un transmisor de luz para emitir luz de iluminación en un modo de medición, […]
Procedimiento y dispositivo para la determinación de la posición de un sensor, del 17 de Mayo de 2019, de Carl Zeiss Optotechnik GmbH: Procedimiento para la determinación de la posición en el espacio de un sensor en diferentes posiciones de captación, en el que, para la determinación […]
Sistema de monumento montado en robótica para sistemas de metrología, del 14 de Febrero de 2019, de THE BOEING COMPANY: Un aparato que comprende: uno o más vehículos robóticos, en donde cada uno del uno o más vehículos robóticos está configurado para moverse a una posición respectiva […]
Procedimiento para medir el estado de una vía usando un vehículo en funcionamiento, y vehículo en funcionamiento para medir el estado de una vía, del 9 de Enero de 2019, de NIPPON STEEL CORPORATION: Procedimiento de medición de un estado de una vía (R) usando un vehículo para operaciones comerciales, en el que el vehículo para operaciones comerciales […]
Dispositivo auxiliar y procedimiento para colocar a medida una disposición de medición óptica que se puede montar en un manipulador, del 10 de Enero de 2018, de KUKA ROBOTER GMBH: Dispositivo auxiliar para la colocación a medida de una disposición de medición óptica que puede montarse en un manipulador , […]