Instrumentos quirúrgicos que incluyen sistemas microelectromecánicos (MEMS).
Una grapadora quirurgica (100, 200), que comprende:
un util final (317) configurado y adaptado para enganchar tejido,
el util final que incluye un conjunto de cartucho de grapas (318) y un yunque (320) asociado operativamente con el conjunto de cartucho de grapas; y al menos un dispositivo de sistema microelectromecanico (MEMS) ("M") conectado operativamente al util final, cada uno del conjunto de cartucho de grapas y el yunque que definen las superficies de contacto del tejido y el al menos un dispositivo MEMS que se conecta operativamente a al menos una de la superficie de contacto del tejido (318a) del conjunto de cartucho de grapas y la superficie de contacto del tejido (320a) del yunque, el dispositivo MEMS que incluye un sistema electrónico integrado que incluye al menos un sensor para detectar la cantidad de presión aplicada al tejido sujeto entre el conjunto de cartucho de grapas y el yunque y una distancia entre la superficie de contacto del tejido del conjunto de cartucho de grapas y superficie de contacto del tejido del yunque, el dispositivo MEMS que ademas incluye uno o mas circuitos electrónicos para la determinación del espesor del tejido, calculando el espesor del tejido sujeto a partir de la distancia conocida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/013056.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: Mail Stop: 8 N-1, 555 Long Wharf Drive New Haven, CT 06511 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HEINRICH, RUSSELL, CUNY, DOUGLAS J..
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B1/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00).
- A61B17/00 A61B […] › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B17/04 A61B […] › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para la sutura de heridas; Soportes o envases para agujas o materiales de sutura.
- A61B17/06 A61B 17/00 […] › Agujas; Soportes o envases para agujas o materiales de sutura (agujas de punción A61B 17/34; agujas hipodérmicas A61M 5/32).
- A61B17/068 A61B 17/00 […] › Grapadoras quirúrgicas (para realizar anastomosis A61B 17/115).
- A61B17/072 A61B 17/00 […] › para aplicar una hilera de grapas en una sola operación.
- A61B17/08 A61B 17/00 […] › Clamps para heridas.
- A61B17/10 A61B 17/00 […] › para poner o quitar los clamps para heridas; Cargadores de clamps para heridas.
- A61B17/115 A61B 17/00 […] › Grapadoras.
- A61B17/128 A61B 17/00 […] › para aplicar o quitar clamps o pinzas.
- A61B17/28 A61B 17/00 […] › Pinzas quirúrgicas (pinzas de biopsia A61B 10/06; forceps obstétricos A61B 17/44).
- A61B18/12 A61B […] › A61B 18/00 Instrumentos, dispositivos o procedimientos quirúrgicos para transferir formas de energía no mecánica hacia o desde el cuerpo (cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › haciendo pasar corriente a través del tejido que se va quiere calentar, p. ej. corriente de alta frecuencia.
- A61B18/14 A61B 18/00 […] › Sondas o electrodos a tal efecto.
- A61B18/18 A61B 18/00 […] › aplicando radiación electromagnética, p. ej. microondas (radioterapia A61N 5/00).
- A61B19/00
- A61D1/00 A61 […] › A61D INSTRUMENTOS, DISPOSITIVOS, UTILES O METODOS DE LA MEDICINA VETERINARIA. › Instrumentos para cirugía veterinaria.
PDF original: ES-2377483_T3.pdf
Fragmento de la descripción:
Instrumentos quirurgicos que incluyen sistemas microelectromecanicos (MEMS)
Antecedentes Campo tecnico La presente descripción se refiere a los instrumentos quirurgicos y, mas concretamente a instrumentos y sistemas quirurgicos mecanicos, electromecanicos y basados en energia.
La presente revelación se refiere de manera general a instrumentos y sistemas quirurgicos y, mas concretamente, a instrumentos y sistemas de grapadora quirurgica e instrumentos y sistemas basados en energia, que tienen dispositivos de sistemas microelectromecanicos (MEMS) para detectar, monitorizar, controlar, medir y/o regular las condiciones y/o parametros asociados con el rendimiento de diversos procedimientos quirurgicos.
Antecedentes de la tecnica relacionada Los instrumentos quirurgicos usados en cirugia abierta y minimamente invasiva se limitan en su capacidad a detectar y/o controlar las condiciones y/o parametros y factores criticos para la operación efectiva. Por ejemplo, los instrumentos quirurgicos convencionales no pueden detectar mensurablemente la cantidad de tejido situado entre las superficies de contacto de tejido de un util final del instrumento quirurgico.
Los sistemas microelectromecanicos (MEMS) son microdispositivos o sistemas integrados que combinan componentes electricos y mecanicos. Se fabrican usando tecnicas de procesamiento de lotes de circuiteria integrada (es decir, IC) y pueden oscilar en tamafo de micr6metros a milimetros. Estos sistemas microelectromecanicos detectan, controlan y/o actuan a micro escala, y funcionan individualmente o en grupos para generar efectos a macro escala.
En general, los dispositivos MEMS son sistemas complejos que incluyen individualmente uno o mas sistemas electricos y/o uno o mas sistemas micro-mecanicos. Los sistemas micro-mecanicos se fabrican usando muchas de las mismas tecnicas de fabricación que tienen los circuitos electr6nicos miniaturizados y han hecho posible la producción masiva de pastillas de circuitos integrados de silicio. En particular, los dispositivos MEMS incluyen microestructuras mecanicas, micro-sensores, micro-actuadores y electr6nica integrada en el mismo entorno (es decir, en una pastilla de silicio) usando tecnologia de micro-fabricación. La tecnologia de micro-fabricación permite la fabricación de grandes grupos de dispositivos, que realizan individualmente tareas simples pero en combinación puede consumar funciones complicadas.
Los dispositivos MEMS son ventajosos por muchas razones. En particular, los dispositivos MEMS pueden ser tan pequefos que cientos se pueden encajar en el mismo espacio, los cuales realizan la misma o muchas funciones diferentes, comparado con un macro-dispositivo, que realiza una función simple. Ademas, usando las tecnicas de procesamiento por lotes de IC, cientos de miles de estos dispositivos MEMS se pueden fabricar en una unica oblea de silicio. Esta producción masiva reduce mucho el precio de los dispositivos individuales. De esta manera, los dispositivos MEMS son relativamente menos caros que sus contrapartidas del macro-mundo. Ademas, los componentes electricos engorrosos tipicamente no se necesitan con los dispositivos MEMS, dado que la electr6nica se puede situar directamente en el dispositivo MEMS. Esta integración tambien tiene la ventaja de captar menos ruido electrico, mejorando de esta manera la precisión y sensibilidad de los sensores. Como se trat6 anteriormente, los dispositivos MEMS proporcionan algo de la funcionalidad de la instrumentación analitica, pero con coste, tamafo, y consumo de potencia enormemente reducidos, y una capacidad de medición en tiempo real, en el propio sitio.
Ejemplos de sistemas microelectromecanicos se revelan en la Patente de U.S. Nº 6.127.811 de Shenoy y otros; la Patente de U.S. Nº 6.288.534 de Starkweather y otros; la Patente de U.S: Nº 6.092.422 de Binning y otros; la Solicitud de Patente de U.S. Nº US 2001/0020166 PCT clasificada el 30 de abril de 1997; Microelectr6nica en el Cuidado Moderno de la Salud por P. Detemple, W. Ehrfeld, H. Freimuth, R. Pommersheim, y P. Wagler en Tecnologia de Dispositivos Medicos, noviembre de 1998; y Sistemas Microelectromecanicos (MEMS) ; Tecnologia, Disefo y Aplicaciones, coordinador: Lee, Abraham, Universidad de California, Los Angeles, Departamento de Ingenieria, Sistemas de Información y Gestión Tecnica, Programa de Curso Corto, Ingenieria 823.53, 19-22 de mayo de 1997, los contenidos completos de cada una de los cuales se incorporan aqui por referencia.
Por consiguiente, existe una necesidad de instrumentos quirurgicos que puedan detectar una multitud de parametros y factores, tales como, por ejemplo, la distancia entre el las superficies de contacto del tejido del instrumento quirurgico. Tal instrumento quirurgico puede, de acuerdo con las condiciones detectadas y/o medidas, utilizar, visualizar, grabar y/o controlar automaticamente la posición de las superficies de contracto del tejido del instrumento quirurgico o alertar a un cirujano anterior a la operación del instrumento quirurgico.
A la vista de lo anteriormente mencionado, existe la necesidad del uso de sistemas microelectromecanicos en combinación con los instrumentos y sistemas quirurgicos y, en particular en los instrumentos de grapado y los instrumentos quirurgicos basados en energia para la monitorización, control y regulación de las condiciones y/o parametros asociados con el rendimiento de diversos procedimientos mecanicos, electromecanicos y electroquirurgicos.
La US 6.221.023 revela un sensor para un cateter que incluye una pluralidad de indicadores de tensión.
La US 5.395.033 revela un instrumento de grapado quirurgico que tiene un sensor electromagnetico para detectar la distancia entre las mordazas de la grapadora.
Resumen La presente invención se dirige a los instrumentos quirurgicos que incluyen un util final configurado y adaptado para enganchar el tejido, y al menos un dispositivo de sistema microelectromecanico (MEMS) conectado operativamente al instrumento quirurgico para detectar una condición y/o medir un parametro y ademas para controlar la condición y/o el parametro adyacente del util final. El al menos un dispositivo MEMS esta conectado operativamente con el util final. El al menos un dispositivo MEMS es al menos uno de un sensor de presión, un sensor de tensión, un sensor de desplazamiento, un sensor óptico, un biosensor, un sensor de temperatura, un sensor de par, un aceler6metro, un sensor de flujo, un sensor electrico y un sensor magnetico para al menos una de detectar, medir y controlar la condición y/o el parametro asociado.
Se contempla que el instrumento quirurgico es una grapadora quirurgica de acuerdo con la reivindicación 1 y el util final incluye un conjunto de cartucho de grapas, y un yunque asociado operativamente con el cartucho de grapas, el cartucho de grapas y el yunque que estan conectados m6vilmente el uno con el otro para llevar uno en yuxtaposición en relación con el otro. Cada uno del cartucho de grapas y el yunque definen las superficies de contacto del tejido y el al menos un dispositivo MEMS esta conectado operativamente con al menos una de la superficie de contacto del tejido del cartucho de grapas y la superficie de contacto del tejido del yunque. Una pluralidad de dispositivos MEMS estan conectados al instrumento quirurgico, los dispositivos MEMS que estan configurados y adaptados para medir la distancia entre la superficie de contacto del tejido del conjunto de cartucho de grapas y la superficie de contacto del tejido del yunque.
Los dispositivos MEMS se configuran y adaptan para medir la cantidad de presión aplicada al tejido sujeto entre la superficie de contacto del tejido del cartucho de grapas y la superficie de contacto del tejido del yunque. Los dispositivos MEMS se configuran y adaptan para medir el espesor del tejido sujeto entre la superficie de contacto del tejido del cartucho de grapas y la superficie de contacto del tejido del yunque.
Se preve que el util final este configurado y adaptado para realizar una anastomosis. El instrumento quirurgico puede ser una grapadora lineal que se adapta para realizar una anastomosis gastrointestinal endosc6pica. Ademas se contempla que el instrumento quirurgico es una grapadora anular que se adapta para realizar una anastomosis extremo a extremo.
Se preve que el util final es un mecanismo de mordaza que incluye un par de miembros de la mordaza acoplados giratoriamente al extremo distal del eje alargado. Se preve ademas que al menos un dispositivo MEMS se proporcione en al menos uno del par de miembros de la mordaza.... [Seguir leyendo]
Reivindicaciones:
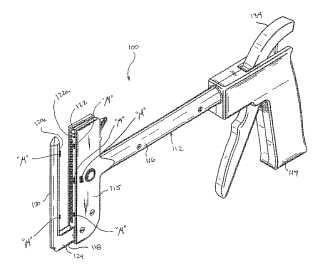
1. Una grapadora quirurgica (100, 200) , que comprende:
un util final (317) configurado y adaptado para enganchar tejido, el util final que incluye un conjunto de cartucho de grapas (318) y un yunque (320) asociado operativamente con el conjunto de cartucho de grapas; y al menos un dispositivo de sistema microelectromecanico (MEMS) ("M") conectado operativamente al util final, cada uno del conjunto de cartucho de grapas y el yunque que definen las superficies de contacto del tejido y el al menos un dispositivo MEMS que se conecta operativamente a al menos una de la superficie de contacto del tejido (318a) del conjunto de cartucho de grapas y la superficie de contacto del tejido (320a) del yunque, el dispositivo MEMS que incluye un sistema electr6nico integrado que incluye al menos un sensor para detectar la cantidad de presión aplicada al tejido sujeto entre el conjunto de cartucho de grapas y el yunque y una distancia entre la superficie de contacto del tejido del conjunto de cartucho de grapas y superficie de contacto del tejido del yunque, el dispositivo MEMS que ademas incluye uno o mas circuitos electr6nicos para la determinación del espesor del tejido, calculando el espesor del tejido sujeto a partir de la distancia conocida.
2. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS incluye un transmisor inalambrico.
3. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS ademas incluye un sensor seleccionado del grupo que consta de un sensor de presión, un sensor de tensión, un sensor de desplazamiento, un sensor óptico, un biosensor, un sensor de temperatura, un sensor de par, un aceler6metro, un sensor de flujo, un sensor electrico y un sensor magnetico.
4. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS incluye un dispositivo de entrega y recepción transductor.
5. El instrumento quirurgico de acuerdo con la reivindicación 4, en el que el al menos un dispositivo MEMS incluye dispositivos de entrega y de recepción transductores que determinan la distancia entre las superficies de contacto del tejido del cartucho de grapas y el yunque.
6. El instrumento quirurgico de acuerdo con la reivindicación 5, que comprende dispositivos de entrega MEMS transductores alineados con los dispositivos de recepción MEMS transductores, los dispositivos de recepción que se configuran para recibir una sefal generada por los dispositivos de entrega, y que ademas comprenden un procesador configurado para correlacionar el tiempo de transmisión con la distancia usando una estructura de datos.
7. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS amplifica una sefal y transmite la sefal a un procesador.
8. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS incluye un biosensor configurado para determinar la condición del tejido.
9. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS incluye un sensor de temperatura.
10. El instrumento quirurgico de acuerdo con la reivindicación 1, en el que el al menos un dispositivo MEMS es un dispositivo MEMS aceler6metro.
11. El instrumento quirurgico de acuerdo con la reivindicación 10, en el que el aceler6metro detecta frecuencias por el desplazamiento de un elemento de voladizo o sintonizado asociado con el dispositivo MEMS.
12. El instrumento quirurgico de acuerdo con la reivindicación 10, en el que el dispositivo MEMS aceler6metro se emplea e integra como dos o tres conjuntos ortogonales que constituyen un dispositivo de medición de aceleración bidimensional o tridimensional o dispositivo tipo giroscopio cuando se dota con un punto conocido de origen y el sistema informatico configurado adecuadamente.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Mejora de imagen endoscópica usando ecualización de histograma adaptativo limitado por contraste (CLAHE) implementada en un procesador, del 1 de Julio de 2020, de EndoChoice, Inc: Un procedimiento para mejorar imágenes obtenidas por al menos dos elementos de visualización en un sistema de endoscopio usando un algoritmo de ecualización […]
Endoscopio con expansor de pupila, del 24 de Junio de 2020, de Steris Instrument Management Services, Inc: Sistema óptico para un estéreo endoscopio que incluye un endoscopio monoscópico que tiene una pupila de entrada que está dividida en una mitad izquierda […]
Unidad de control unible a un endoscopio que tiene un árbol que puede desviarse a través de dos mandos rotatorios para permitir la operación de los mandos con una man, del 24 de Junio de 2020, de Human XTensions Ltd: Una unidad de control unible a un endoscopio , teniendo el endoscopio dos mandos rotatorios externos y un árbol que puede desviarse a través de los dos […]
Accionamiento de un dispositivo que comprende brazos mecánicos, del 17 de Junio de 2020, de Memic Innovative Surgery Ltd: Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende: un primer engranaje configurado […]
DISPOSITIVO DE EXTRACCIÓN DE RESIDUOS SÓLIDOS POR VIA RECTAL, del 12 de Mayo de 2020, de MARTÍNEZ GARZON, Miguel Angel: 1. Dispositivo de extracción de residuos sólidos por vía rectal caracterizado porque comprende al menos: un cabezal cilíndrico con un tubo central […]
Endoscopio ópticamente adaptativo, del 22 de Abril de 2020, de Steris Instrument Management Services, Inc: Sistema de obtención de imágenes para un endoscopio con un sistema óptico, comprendiendo el sistema de obtención de imágenes, un sistema de video endoscópico, […]
Dispositivo automático para inflado/desinflado aplicado en sistema endoscópico de exploración y obtención de imágenes mediante TCO, del 22 de Abril de 2020, de Micro-Tech (Nanjing) Co., Ltd: Un dispositivo automático para inflado/desinflado aplicado en un sistema endoscópico de exploración y obtención de imágenes mediante TCO, […]