Aparato y procedimiento de seguimiento de haces láser enfrentados.
Aparato y procedimiento de seguimiento de haces láser enfrentados,
polarizados con irradiancia anular y emitidos por dos transceptores ópticos (24, 24'). El procedimiento comprende:
- inicializar una variable {ep};
- iterar mientras {ep} >{ep}min:
- adquirir el valor local de la potencia Pr recibida por el aparato receptor (6) en la iteración n,
- estimar el vector gradiente de potencia **IMAGEN** en la posición actual de la iteración n({ze}nr,{ph}nr);
- obtener las variaciones {de}{ze}n+1 y {de}{ph}n+1 en el ángulo de elevación {ze} y de acimut {ph}, respectivamente, que hay que realizar desde la posición actual en la iteración n ({ze}nr,{ph}nr) para aproximarse al máximo de potencia en la siguiente iteración n+1;
- actuar sobre los motores de elevación y acimut del aparato de guiado (3) para posicionar el tubo reflector catadióptrico (25) en la posición ({ze}nr + {de}n+1{ze}, {ph}nr + {de}n+1{ph});
- actualizar el valor estimado del módulo al cuadrado del gradiente {ep}.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100111.
Solicitante: UNIVERSIDAD DE MALAGA.
Nacionalidad solicitante: España.
Inventor/es: ROMERO SANCHEZ,JORGE, FERNANDEZ RAMOS,RAQUEL, MARTIN CANALES,JOSE FRANCISCO, RIOS GÓMEZ,FRANCISCO JAVIER, MARÍN MARTÍN,FRANCISCO JAVIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04B10/22
Fragmento de la descripción:
óptimo con independencia de los posibles movimientos de las estructuras que recibida por un sistema radiante en función de la transmitida por otro sistema radiante.
soportan a los transceptores. La presente invención soluciona dicho problema del seguimiento del haz láser entre dos transceptores ópticos remotos. El objeto del aparato y procedimiento de 5 seguimiento que aquí se presenta es el mantenimiento de los haces enfrentados con independencia de los posibles movimientos que puedan existir en las bases que sustentan a dichos aparatos de seguimiento. Descripción de la invención 1 O La presente invención consiste en un aparato y un procedimiento de seguimiento de haces láser enfrentados basado en control embebido. El aparato de seguimiento está instalado en un transceptor óptico que consta de un sistema de guiado micrométrico electrónicamente controlado sobre el que se sustenta un aparato duplexor óptico que permite la transmisión y recepción simultánea de haces láser. Así, 15 el aparato duplexor óptico de un transceptor óptico transmite un haz láser y recibe a la vez otro haz láser procedente de un aparato duplexor de un transceptor óptico homólogo. El procedimiento de seguimiento de haz que aquí se describe implica a dos haces láser enfrentados que se alinean inicialmente y después se siguen mutuamente para permanecer alineados en el tiempo. El algoritmo de seguimiento se aplica por 20 duplicado en cada pareja transmisor-receptor y actúa de forma independiente en cada una de ellas. El aparato de guiado micrométrico permite el movimiento de elevación, () y de acimut ffJ con precisión del microradián, siendo activado por drivers en sus correspondientes motores mediante un microcontrolador. 25 El aparato transmisor es un circuito electrónico basado en un láser de estado sólido que emite un haz de potencia Pt controlado por un microcontrolador. El aparato receptor es un circuito electrónico que gestiona la potencia recibida Pr por un fotodiodo de avalancha mediante un microcontrolador. Consideremos una pareja de aparatos de seguimiento situados a una distancia 30 R, uno de ellos actuando como transmisor enviando una potencia Pt, y otro como receptor recibiendo una potencia Pr· El procedimiento de seguimiento presentado se basa en la ecuación de transmisión de Friis aplicada a un sistema óptico. Esta ecuación determina la potencia La potencia Pr recibida por el receptor viene dada por: ( 1) 5 1 O siendo Pt la potencia transmitida, ft y fr los coeficientes de pérdidas por reflexión, l la longitud de onda, R la separación entre el transmisor y el receptor, Dt y Dr los diagramas de radiación o directividades del transmisor y receptor respectivamente, fhr y (/Jt, r los ángulos de elevación y acimut del transmisor y del receptor, Ut y Ur los vectores de polarización del transmisor y del receptor. Considerando que no existen cambios en las reflexiones, polarizaciones y directividad del transmisor podemos simplificar la ecuación (1) a: (2) 15 donde K es una constante en primera instancia que engloba todos los factores antes mencionados. En estas circunstancias, la potencia recibida Pr es proporcional al diagrama de radiación del receptor independientemente de la orientación del transmisor. 20 25 30 Distingamos entre proceso de alineamiento y proceso de seguimiento. En el primero, se debe fijar un origen de coordenadas que determinará un valor máximo de la potencia recibida. El proceso de alineamiento debe hacerse manualmente por medios ópticos antes de realizar el proceso de seguimiento. Si el valor de la potencia recibida es Pr (Or, (/Jr ) , el objetivo es conseguir el máximo que ocurre en (On (/Jr) = (0, 0) . Una vez alineado este valor será el origen de coordenadas y el objetivo de maximizar la potencia recibida se verá cumplido. Un cambio en la dirección del transmisor implica un desplazamiento de coordenadas desde la posición (Or, tpr) a la posición (Or -li0 , tpr -litp) . El proceso de seguimiento implica determinar los valores de li8 y litp mediante el procedimiento objeto de esta invención y hacer que esas diferencias sean lo más pequeña posibles. Las variables li8 y litp son dependientes del tiempo (li8 (t) y litp (t) ) , por lo que el mecanismo de seguimiento es un proceso dinámico. La búsqueda del máximo debe hacerse en coordenadas polares y el proceso de búsqueda debe ser secuencial. El método que se presenta en esta invención está basado en una técnica de maximización conocida como 'método del gradiente' que consiste en iterar sucesivamente la siguiente ecuación: (on+t) (on) (/Jn+l = (/Jn +ll·VPr (Bn, qJn) (3) 5 siendo n el número de iteración, h un escalar que indica la longitud del paso en cada iteración (dimensionado en unidades angulares por unidad de potencia) y V el operador gradiente. A medida que iteramos la ecuación nos acercamos cada vez más a la posición objetivo (60 , iifP) . El aparato de seguimiento está controlado por un microcontrolador que actúa 1 O sobre un aparato de guiado micrométrico que dirige a un sistema óptico basado en un aparato duplexor que focaliza el haz láser recibido, siendo éste procesado por un aparato receptor basado en fotodiodo de avalancha que estima la potencia del haz Pr· A la vez, el aparato de seguimiento dirige a un aparato transmisor que emite un haz láser de potencia Pt que se focaliza a través del mismo sistema óptico duplexor hacia 15 otro aparato de seguimiento remoto que realiza la misma función. Se forma así un par de aparatos de seguimiento situados en puntos remotos que emiten y reciben haces láser enfrentados. El microcontrolador que ejecuta el procedimiento de seguimiento se encuentra insertado en un lazo de control que incluye a los drivers que actúan sobre los motores 20 paso a paso de elevación y acimut de un aparato de guiado pudiendo actuar en ellos fijando los valores angulares Br y (/Jr respectivamente tras un proceso de alineamiento e inicialización. Por otro lado, el microcontrolador recibe la información del valor de la potencia recibida Pr suministrada por el aparato receptor. Dada una posición angular, la potencia recibida será Pr (Bntpr) . 25 El microcontrolador aplica el procedimiento de seguimiento cada cierto intervalo de tiempo o de muestreo. Éste ha de ser inferior a la cota que verifica la condición de Nyquist; es decir, si fs es la máxima frecuencia esperada en la variación de la posición...
Reivindicaciones:
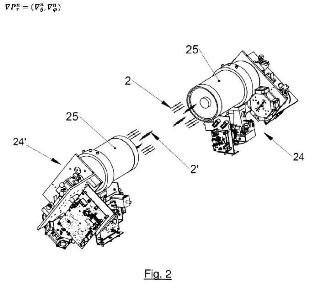
1. Aparato de seguimiento de haces láser enfrentados, polarizados con irradiancia anular y emitidos por dos transceptores ópticos (24, 24') que disponen de:
• un aparato duplexor óptico (4) con un tubo reflector catadióptrico (25) para la recepción del haz láser recibido (2) y la transmisión del haz láser transmitido (2') ;
• un aparato de guiado (3) del tubo reflector catadióptrico (25) , con un motor de elevación y un motor de acimut para modificar, respectivamente, el 1 O ángulo de elevación fJ y el ángulo de acimut qJ del tubo reflector catadióptrico (25) ;
• un transmisor láser (5) ;
• un aparato receptor (6) encargado de obtener la potencia Pr recibida proveniente del haz láser recibido (2) ;
estando el aparato de seguimiento (1) instalado en cada transceptor óptico (24, 24') , caracterizado por que dicho aparato de seguimiento (1) comprende un circuito de control (8) encargado de obtener del aparato receptor (6) el valor de la potencia Pr recibida por el mismo y de aplicar periódicamente un algoritmo de seguimiento, dicho algoritmo de seguimiento comprendiendo:
• La inicialización de una variable E, que representa el valor estimado del módulo al cuadrado del gradiente;
• La iteración mientras E > E . , siendo E . un valor predeterminado, los mm m1n siguientes pasos:
• La adquisión del valor local de la potencia recibida en la iteración n (fJ;!, qJ;!) , que asimismo, en las iteraciones del algoritmo de seguimiento, comprende:
o adquirir, en la posición actual de la iteración n (fJ;!, qJ;!) , la potencia recibida P;! (8'i:, qJ;!) ;
o actuar sobre los motores de elevación y acimut del aparato 30 de guiado (3) para posicionar el tubo reflector catadióptrico (25) en las posiciones (8!! + h6, qJ'i:) , (fJ~-h6, qJ'¡:) , (fJ;!, qJ;! + hlfJ) y (8~, qJ;! -hlfJ) y adquirir para cada una de dichas posiciones la potencia recibida, siendo respectivamente P~ (8~ + h9, tp~) .P~ (8~-ht~>fP~) , P~ (8~, tp~ + h, ) y P~ (8~, lp~ -h, ) ; siendo h9 y h, unos valores predeterminados;
• La estimación del vector gradiente de potencia VP~ = (V3', y;) en la posición actual de la iteración n (8~, tp~) con respecto a la variación del ángulo de elevación 8 y de acimut fP, realizándose, en las iteraciones del algoritmo de seguimiento, mediante diferencias centrales cumpliéndose: V3' = (P~ (8~ +h6, tp~) -P~ (8~-hthfP~) ) / (2 · hs) .
' v; = (P~ (8~, tp~ + h, ) -P~ (8~, tp~-h, ) ) / (2 · h, ) ;
• La obtención, a partir de dicho vector gradiente de potencia, de las variaciones 0:+1 y ~+1 en el ángulo de elevación 8 y de acimut tp, respectivamente, que hay que realizar desde la posición actual en la iteración n (8~, tp~) para aproximarse al máximo de potencia en la siguiente iteración n+1, realizándose, en las iteraciones del algoritmo de seguimiento, según las siguientes ecuaciones:
~n+1 _ h l'71l UfJ -• V (}"
'
~+1 =h· v;;
siendo h un valor predeterminado;
• La actuación sobre los motores de elevación y acimut del aparato de guiado (3) para posicionar el tubo reflector catadióptrico (25) en la posición e8~+ ¡¡;+1, lp~ + ¡¡;+1) ;
• La actualización del valor estimado del módulo al cuadrado del
gradiente E.
2. Aparato de seguimiento según la reivindicación 1, donde las iteraciones del algoritmo de seguimiento se realizan mientras el número de iteraciones n no supere un número máximo de iteraciones n_MAX, estando configurado el circuito de control (8) para, en caso de que el número de iteraciones supere el número máximo de iteraciones n_MAX, activar un estado de seguimiento fallido que indique el fallo en el seguimiento del haz láser.
3. Aparato de seguimiento según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente unos circuitos driver de potencia (7, 7') a través de los cuales el circuito de control (8) actúa sobre los motores de elevación y de acimut del aparato de guiado (3) .
4. Aparato de seguimiento según cualquiera de las reivindicaciones anteriores, donde el circuito de control (8) está configurado para aplicar el algoritmo de seguimiento según un período de muestreo Tm• cumpliéndose Tm< O. 5//5, siendo fs la máxima frecuencia esperada en la variación de la posición del máximo de potencia.
5. Aparato de seguimiento según cualquiera de las reivindicaciones anteriores, donde el circuito de control (8) comprende un microcontrolador (18) .
6. Transceptor óptico con capacidad de efectuar el seguimiento de haces láser enfrentados, polarizados con irradiancia anular, que dispone de:
• un aparato duplexor óptico (4) con un tubo reflector catadióptrico (25) para la recepción del haz láser recibido (2) y la transmisión del haz láser transmitido (2') ;
• un aparato de guiado (3) del tubo reflector catadióptrico (25) , con un motor de elevación y un motor de acimut para modificar, respectivamente, el ángulo de elevación 8 y el ángulo de acimut cp del tubo reflector catadióptrico (25) ;
• un transmisor láser (5) ;
• un aparato receptor (6) encargado de obtener la potencia Pr recibida
proveniente del haz láser recibido (2) ; caracterizado por que comprende el aparato de seguimiento de haces láser enfrentados según cualquiera de las reivindicaciones 1 a 6.
7. Procedimiento de seguimiento de haces láser enfrentados, polarizados con irradiancia anular y emitidos por dos transceptores ópticos (24, 24') que disponen de:
• un aparato duplexor óptico (4) con un tubo reflector catadióptrico (25) para la recepción del haz láser recibido (2) y la transmisión del haz láser transmitido (2') ;
• un aparato de guiado (3) del tubo reflector catadióptrico (25) , con un motor de elevación y un motor de acimut para modificar, respectivamente, el
ángulo de elevación IJ y el ángulo de acimut tp del tubo reflector catadióptrico (25) ;
• un transmisor láser (5) ;
• un aparato receptor (6) encargado de obtener la potencia Pr recibida
proveniente del haz láser recibido (2) ; caracterizado por que dicho procedimiento de seguimiento comprende aplicar periódicamente un algoritmo de seguimiento, dicho algoritmo de seguimiento comprendiendo:
• La inicialización de una variable E, que representa el valor estimado del módulo al cuadrado del gradiente;
• La iteración mientras E > Emin (E > Emtn) . siendo Emin un valor predeterminado, los siguientes pasos:
• La adquisión del valor local de la potencia recibida en la iteración n (B~. tp~) . que asimismo, en las iteraciones del algoritmo de seguimiento, comprende:
(25) en las posiciones (IJ~ + h6, tp~) . (IJ~-h6, tp~) . (IJ~, tp~ + h, ) y (IJ~, tp~ -h, ) y adquirir para cada una de dichas posiciones la potencia recibida, siendo respectivamente P~ (IJ~ + h6, tp~) , P~ (IJ~-h6, tp~) , P~ (IJ~, tp~ + hf') y P~ (B~.tp~ -hf') ; siendo h6 y hf' unos valores predeterminados; • La estimación del vector gradiente de potencia VP~ = (vtf, v;) en la posición actual de la iteración n (IJ~, tp~) con respecto a la variación del ángulo de elevación IJ y de acimut (/) , realizándose, en las iteraciones del algoritmo de seguimiento, mediante diferencias centrales cumpliéndose: v; = (P~ (IJ~ +h6, tp~) -P~ (IJ~-h6, tp~) ) / (2 · h6 ) .' y;= (P~ (IJ~, tp~ + hf') -P~ (IJ~, tp~ -h, ) ) / (2 · h, ) ; • La obtención, a partir de dicho vector gradiente de potencia, de las variaciones &;+1 6:+1y .s;+l en el ángulo de elevación 8 y de acimut tp, respectivamente, que hay que realizar desde la posición actual en la iteración n (8~, (/J~) para aproximarse al máximo de potencia en la siguiente iteración n+1, realizándose, en las iteraciones del algoritmo de seguimiento, según las siguientes ecuaciones: 6"'+1-h.~ B -e; .s;+l = h . pr;; siendo h un valor predeterminado; • La actuación sobre los motores de elevación y acimut del aparato de guiado (3) para posicionar el tubo reflector catadióptrico (25) en la posición ( 8~ + &;+1, qJ~ + .s;+t) ; • La actualización del valor estimado del módulo al cuadrado del gradiente E. 8. Procedimiento de seguimiento según la reivindicación 7, donde las iteraciones del algoritmo de seguimiento se realizan mientras el número de iteraciones n no supere un número máximo de iteraciones n_MAX, y donde el procedimiento comprende, en caso de que el número de iteraciones supere el número máximo de iteraciones n_MAX, activar un estado de seguimiento fallido que indique el fallo en el seguimiento del haz láser. 9. Procedimiento de seguimiento según cualquiera de las reivindicaciones 7 a 8, donde el algoritmo de seguimiento se aplica según un período de muestreo Tm• cumpliéndose Tm < O. 5/{5 , siendo fs la máxima frecuencia esperada en la variación de la posición del máximo de potencia. o adquirir, en la posición actual de la iteración n (IJ~, tp~) . la potencia recibida P~ (IJ~, tp~) ;
o actuar sobre los motores de elevación y acimut del aparato de guiado (3) para posicionar el tubo reflector catadióptrico
Patentes similares o relacionadas:
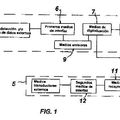
Método y sistema de red de iluminación universal, del 26 de Julio de 2017, de Philips Lighting North America Corporation: Un aparato , que comprende al menos una fuente de luz basada en LED configurada para generar radiación, incluyendo la radiación generada […]
 SISTEMA AUTONOMO DE VUELO CON LASER, del 17 de Enero de 2011, de OBERON SPACE, S.L.L: Sistema autónomo de vuelo con láser, que consta de un equipo terrestre (ST) y un equipo aéreo (SA) bien diferenciados; yendo dicho equipo terrestre (ST) provisto […]
SISTEMA AUTONOMO DE VUELO CON LASER, del 17 de Enero de 2011, de OBERON SPACE, S.L.L: Sistema autónomo de vuelo con láser, que consta de un equipo terrestre (ST) y un equipo aéreo (SA) bien diferenciados; yendo dicho equipo terrestre (ST) provisto […]
 PROCEDIMIENTO Y DISPOSITIVO PARA LA REALIZACION DE UN ENLACE OPTICO POR IMPULSOS LASER, del 21 de Mayo de 2010, de MBDA FRANCE: Procedimiento para la localización de un móvil que se aleja de un dispositivo de localización, poniendo en práctica dicho procedimiento un enlace […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA REALIZACION DE UN ENLACE OPTICO POR IMPULSOS LASER, del 21 de Mayo de 2010, de MBDA FRANCE: Procedimiento para la localización de un móvil que se aleja de un dispositivo de localización, poniendo en práctica dicho procedimiento un enlace […]
DISPOSITIVO PARA LA TRANSMISION SIN CONTACTO DE DATOS OPTICOS., del 16 de Junio de 2006, de STEMMANN-TECHNIK GMBH: Disposición para la transmisión sin contacto de datos entre un componente constructivo giratorio y otro estacionario, mediante señales luminosas emitidas […]
TELEFONO MOVIL DE COMUNCACION PERSONAL., del 16 de Octubre de 2004, de CONSULTING, COMUNICACIO I DISSENY, S.L.: Teléfono móvil de comunicación personal. Comprende un grupo fijo compuesto por un altavoz , un micrófono , una pantalla y un teclado , susceptible […]
SISTEMA DE INFORMACION., del 1 de Febrero de 2004, de SENNHEISER ELECTRONIC GMBH & CO. KG: Sistema de información para el suministro de informaciones a una zona predeterminada, con un dispositivo emisor para la emisión de informaciones en forma […]
LOCALIZADOR DE CONDUCTOR AUSENTE., del 16 de Noviembre de 2000, de BLANCO SUAREZ,EMILIO FERNANDEZ PENELA,CARLOS FERNANDEZ PENELA,CARLOS MENENDEZ VAZQUEZ,GERARDO: 1. Localizador de conductor ausente aplicable enestacionados, caracterizado por estar constituido por un equipo instalado en el vehículo, que comprende […]
 SISTEMA DE COMUNICACION VEHICULAR INTERACTIVO, EN PARTICULAR ENTRE VEHICULOS AUTOMOVILES Y SU PROCEDIMIENTO DE UTILIZACION, del 16 de Mayo de 2008, de ASTRON FIAMM SAFETY S.P.A.: Sistema interactivo de comunicación de vehículo, en particular para vehículos automóviles, que comprende un dispositivo de comunicación diseñado […]
SISTEMA DE COMUNICACION VEHICULAR INTERACTIVO, EN PARTICULAR ENTRE VEHICULOS AUTOMOVILES Y SU PROCEDIMIENTO DE UTILIZACION, del 16 de Mayo de 2008, de ASTRON FIAMM SAFETY S.P.A.: Sistema interactivo de comunicación de vehículo, en particular para vehículos automóviles, que comprende un dispositivo de comunicación diseñado […]