SISTEMA DE CONTROL DE CRUCERO ADAPTATIVO PROVISTO DE ASISTENCIA POR VISION.
Sistema de control de crucero adaptativo provisto de asistencia por visión,
instalado en un vehículo (1) automóvil, que dispone de:- medios de detección de distancia (10) en la parte frontal del vehículo (1);- medios de procesamiento de datos (11);- medios de control (12) de la velocidad del vehículo (1), configurados para:- mantener una distancia de seguridad mínima predeterminada, y calculada en función de la velocidad propia del vehículo (1) y de la velocidad de un vehículo objetivo (2), con al menos un vehículo objetivo (2), en caso de que lo haya,- mantener una velocidad de crucero predeterminada, dando prioridad al mantenimiento de la distancia de seguridad;- medios de detección visuales (13) para detectar vehículos y líneas de carril y predecir la trayectoria del vehículo (1) y para determinar el vehículo objetivo (2) con su velocidad y posición relativa asociados al carril correspondiente
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900017.
Solicitante: FUNDACION PARA LA PROMOCION DE LA INNOVACION, INVESTIGACION Y DESARROLLO TECN.IND.AUTOMOCION GALICIA.
Nacionalidad solicitante: España.
Provincia: PONTEVEDRA.
Inventor/es: SANCHEZ PONS,FRANCISCO JOSE, SANCHEZ FERNANDEZ,DAVID, CUEVAS VILA,ANGEL.
Fecha de Solicitud: 18 de Diciembre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 25 de Mayo de 2011.
Clasificación Internacional de Patentes:
- B60K31/00D
- B60W30/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Control de crucero.
Clasificación PCT:
- B60K31/00 B60 […] › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
- B60W30/14 B60W 30/00 […] › Control de crucero.
Fragmento de la descripción:
Sistema de control de crucero adaptativo provisto de asistencia por visión.
Campo de la invención
La presente invención se aplica en el campo de los sistemas de asistencia a la conducción de vehículos automóvil, con la doble finalidad de revertir en un incremento del confort del conductor y en la seguridad activa del vehículo y su entorno.
Antecedentes de la invención
El Control de Crucero Adaptativo (ACC) se considera una evolución del Control de Crucero (CC) que se encuentra presente en numerosos automóviles. Este último es un sistema electrónico que permite fijar una velocidad de marcha que se mantiene sin necesidad de que el conductor mantenga pisado el acelerador. Contribuye a la reducción de la fatiga de un conductor durante la conducción en vías en las cuales la velocidad se suele mantener prácticamente constante. Se trata, por lo tanto, de un sistema que aporta confort al conductor.
El ACC es un sistema que añade al anterior el mantenimiento de una distancia de seguridad constante con el vehículo que nos precede. Consta de un sensor situado en la parte frontal del vehículo, un controlador electrónico, integrado en la arquitectura electrónica del vehículo, encargado de regular el funcionamiento del sistema y de una interfaz que permite al conductor recibir información y controlar el sistema.
El ACC añade por lo tanto una función de seguridad activa al control de crucero convencional, resultando de gran ayuda a la hora de evitar accidentes por alcance. Dentro de los conocidos como sistemas de asistencia a la conducción (ADAS, Advanced Driver Assistance Systems) es considerado un sistema de control longitudinal, ya que trabaja para mejorar la dinámica longitudinal del vehículo.
En el transcurso del proceso de diseño de un sistema ACC, al igual que en otros sistemas de control, se adopta una estrategia o conjunto de ellas que definen su comportamiento final. Para ello, el diseñador se basa en unos requerimientos previos y unos rangos de funcionamiento que buscan configurar un diseño que permita ofrecer un comportamiento robusto y fiable. Una de las decisiones que comprende mayor dificultad, desde el punto de vista de la estrategia de fusión, es la predicción de la trayectoria a seguir por el vehículo propio. La determinación de esta trayectoria define la decisión del ACC de clasificar los vehículos detectados por el sensor como objetivos o no, es decir, si son susceptibles de ser seguidos por el vehículo propio o se encuentran fuera de su trayectoria.
La aproximación que se emplea habitualmente para predecir la trayectoria consiste en suponer que el vehículo se encuentra centrado en un carril con un ancho fijo y con radio de curvatura definido, por ejemplo, por el giro de volante que proporciona el conductor. Obviamente, en muchos casos, esta aproximación de la trayectoria se desvía bastante de la realidad. En gran medida porque no se puede anticipar la intención del conductor, pero también porque no existe una medida del ancho del carril, ni de la situación del vehículo propio, ni de los demás con respecto a éste.
Los sistemas de detección basados en visión ofrecen la ventaja de aportar información adicional a la que ofrecen los sensores lídar (Light Detection And Ranging) y radar. Un ejemplo de este tipo de signos a detectar son las líneas delimitadoras de carril.
La aportación que ofrece la tecnología basada en visión a un sistema ACC consiste en el enriquecimiento de la información que recibe el vehículo acerca del entorno en el que circula, información que no ofrecen otras tecnologías basadas en dispositivos de detección como radar o láser.
Descripción de la invención
La invención se refiere a un sistema de control de crucero adaptativo provisto de asistencia por visión de acuerdo con la reivindicación 1. Realizaciones particulares se definen en las reivindicaciones dependientes.
El sistema que la presente invención propone está instalado en el vehículo automóvil y dispone de:
- medios de detección de distancia, situados en la parte frontal del vehículo;
- medios de procesamiento de datos configurados para:
- medios de detección visuales configurados para detectar vehículos y detectar las líneas de carril de la vía por la que circula el vehículo. Los medios de procesamiento de datos utilizan la información proveniente de los medios de detección visuales para predecir la trayectoria del vehículo y para determinar el al menos un vehículo objetivo con su velocidad y posición relativa clasificados y asociados cada uno al carril en el que se encuentran;
- medios de control de la velocidad del vehículo, configurados para:
La distancia de seguridad mínima predeterminada se calcula preferentemente en función de la velocidad propia del vehículo y de la velocidad del vehículo objetivo.
Breve descripción de los dibujos
A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
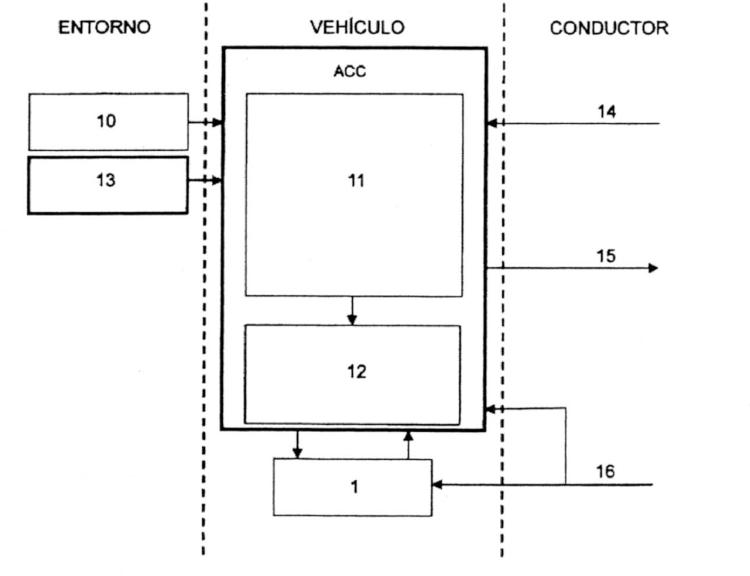
La Figura 1 muestra el diagrama de bloques de un sistema ACC de acuerdo con el estado del arte.
La Figura 2 muestra el diagrama de bloques del sistema ACC provisto de cámara de acuerdo con la presente invención.
En la Figura 3 se detallan las fases que pertenecen a la integración y el procesado de la tecnología del sistema ACC asistido con visión de la Figura 2.
Las Figuras 4 y 5 muestran un vehículo equipado con el sistema ACC objeto de la presente invención, provisto de cámara, circulando en una vía de alta capacidad, rodeado de tráfico intenso.
La Figura 6 muestra un vehículo equipado con el sistema ACC objeto de la presente invención circulando por una vía con dos sentidos de circulación.
La Figura 7 muestra un vehículo equipado con el sistema ACC objeto de la presente invención circulando por una vía con una curva pronunciada.
Descripción de una realización preferida de la invención
La Figura 1 muestra el diagrama de bloques de un sistema ACC común, de acuerdo con el estado del arte, que emplea medios de detección de distancia 10, por ejemplo un sensor de largo alcance, situados en la parte frontal del vehículo 1, para monitorizar el área frontal del mismo. En la Figura 2 se puede ver el diagrama de bloques que incorpora asistencia por visión al ACC anterior, de acuerdo a la presente invención. Como se puede ver en la figura, unos medios de procesamiento de datos 11 del sistema ACC reciben información del entorno (frente al vehículo) por medio de los medios de detección de distancia 10 y de los medios de detección visuales 13, por ejemplo una cámara. También recibe datos 14 de la intención del conductor acerca de la configuración del ACC. A su vez ofrece información 15 al conductor sobre el estado del ACC durante su funcionamiento. El propio vehículo 1 y el sistema ACC reciben información de entrada 16 del vehículo, como por ejemplo la posición o el giro del volante, que servirán para predecir la trayectoria del vehículo y detectar si va a cambiar o no de carril. Los medios de control 12 de la velocidad del vehículo 1 se encargan de mantener una distancia de seguridad mínima predeterminada con los vehículos que se encuentren en la trayectoria estimada del vehículo 1, en caso de que lo haya y de mantener una velocidad de crucero predeterminada, dando prioridad al mantenimiento...
Reivindicaciones:
1. Sistema de control de crucero adaptativo provisto de asistencia por visión, instalado en un vehículo (1) automóvil, que dispone de:
- medios de detección de distancia (10), situados en la parte frontal del vehículo (1);
- medios de procesamiento de datos (11) configurados para:
- medios de control (12) de la velocidad del vehículo (1), configurados para:
caracterizado porque adicionalmente comprende medios de detección visuales (13) configurados para detectar vehículos y detectar las líneas de carril de la vía por la que circula el vehículo (1);
y porque los medios de procesamiento de datos (11) utilizan la información proveniente de los medios de detección visuales (13) para predecir la trayectoria del vehículo (1) y para determinar el al menos un vehículo objetivo (2) con su velocidad y posición relativa clasificados y asociados cada uno al carril en el que se encuentran.
2. Sistema de control de crucero adaptativo provisto de asistencia por visión, caracterizado porque la distancia de seguridad mínima predeterminada se calcula en función de la velocidad propia del vehículo (1) y de la velocidad del vehículo objetivo (2).
Patentes similares o relacionadas:
Controlador inalámbrico de velocidad para vehículos, del 29 de Junio de 2020, de BLANCO MUÑOZ,JUAN: La invención denominada controlador inalámbrico de velocidad para Vehículos, comprende un sistema y procedimiento para limitar la velocidad máxima de un vehículo […]
 Máquina o vehículo de potencia con gestión de potencia, del 25 de Diciembre de 2019, de CLARK EQUIPMENT COMPANY: Un conjuntoconjunto de control, para una máquina de potencia que tiene un motor , que comprende un sensor de la velocidad del motor configurado […]
Máquina o vehículo de potencia con gestión de potencia, del 25 de Diciembre de 2019, de CLARK EQUIPMENT COMPANY: Un conjuntoconjunto de control, para una máquina de potencia que tiene un motor , que comprende un sensor de la velocidad del motor configurado […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Sistema de detección de velocidad y monitoreo de cumplimiento, del 16 de Octubre de 2019, de ITCiCo Spain, S.L: Un sistema de señal de control graduado para advertir a un usuario de un vehículo, el sistema comprendiendo; medios de provisión de posición […]
Procedimiento y dispositivo para la ayuda al cambio de velocidad y al cambio de vía, del 2 de Octubre de 2019, de PSA AUTOMOBILES S.A: Procedimiento de ayuda a la conducción que comprende una etapa de - determinación de una propuesta de cambio de vía, que requiere una primera validación, caracterizado […]
SISTEMA DE MEJORA DE MODO DE CONDUCCIÓN CRUCERO CON INCLUSIÓN DE RUTAS CON TRAYECTOS CURVOS BASADO EN AJUSTES DE VELOCIDAD AUTOMÁTICOS, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración en vehiculos y un método de operación de los mismos que permite cambios de comportamiento en éste para posibilitar […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
Método para accionar la función de control de crucero en un vehículo equipado con conducción híbrida, especialmente un vehículo comercial o industrial, del 23 de Enero de 2019, de IVECO S.P.A.: Método para accionar la función de control de crucero en un vehículo equipado con conducción híbrida, especialmente un vehículo comercial o industrial, […]