SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, CONTROLADOR PARA UN SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, SISTEMA DE JUEGOS Y MÉTODO DE CÁLCULO DE POSICIONES INDICATIVAS.
Un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un controlador (16),
comprendiendo dicho sistema de cálculo de posiciones indicativas: una sección fotoemisora (15); un controlador (16) constituido por una sección de formación de imágenes (18) que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada; una sección determinativa (210) que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y una sección de cálculo (350) que realiza cálculos de posiciones basándose en información identificativa de los píxeles efectivos primarios, donde la sección de cálculo (350) calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de cada uno de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08151315.
Solicitante: NAMCO BANDAI GAMES INC.
ZEROPLUS TECHNOLOGY CO., LTD.
SHANG HWANG INDUSTRY CO., LTD.
KUMABAYASHI, TATSUJI.
Nacionalidad solicitante: Japón.
Dirección: 5-15, HIGASHI-SHINAGAWA 4-CHOME SHINAGAWA-KU TOKYO 140-8590 JAPON.
Inventor/es: TAI,SHING LUNG C/O SHANG HWANG INDUSTRY CO.,LTD, KUMABAYASHI,TATSUJI, KUO,CHUN LIANG C/O ZEROPLUS TECHNOLOGY CO.,LTD.
Fecha de Publicación: .
Fecha Solicitud PCT: 12 de Febrero de 2008.
Fecha Concesión Europea: 4 de Agosto de 2010.
Clasificación Internacional de Patentes:
- A63F13/04
- G01S1/70 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S5/16B
Clasificación PCT:
- A63F13/00 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63F JUEGOS DE CARTAS, RULETA O JUEGOS DE MESA; JUEGOS DE INTERIOR QUE UTILIZAN PEQUEÑOS ELEMENTOS DE JUEGO MOVILES; JUEGOS NO PREVISTOS EN OTRO LUGAR; GAMES NOT OTHERWISE PROVIDED FOR. › Videojuegos, p. ej. juegos que utilizan una presentación generada electronicamente en dos o más dimensiones.
- F41G3/26 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › Aparatos de instrucción o de entrenamiento para la puntería.
- G01S5/16 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
ANTECEDENTES DEL INVENTO
El presente invento se refiere a un sistema de cálculo de posiciones indicativas, un controlador para un sistema de cálculo de posiciones indicativas, un sistema de juegos y un método de cálculo de posiciones indicativas.
En dicho sistema de cálculo de posiciones indicativas, cuando la información de fotorrecepción relativa a un píxel de la imagen supera un valor liminar predeterminado, se determina que este píxel corresponde a la sección fotoemisora. La posición indicativa del indicador se calcula basándose en la posición de dicho píxel. Por ejemplo, la patente japonesa Nº 2961097 revela dicha tecnología.
Ya se conoce un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un indicador en un plano indicativo (que puede ser un monitor o una pantalla); por ejemplo, un sistema de juegos de tiro al blanco que utiliza un controlador tipo pistola, o un sistema de presentación que utiliza un dispositivo de puntero. En dicho sistema de cálculo de posiciones indicativas, cerca del plano indicativo se sitúa una sección fotoemisora de infrarrojos o similar. La sección fotoemisora se obtiene mediante un sensor de imágenes (sensor fotorreceptor) dispuesto en el extremo del indicador, y la posición indicadora del indicador se calcula basándose en la posición de la
sección fotoemisora en la imagen resultante.No obstante, dado que un sistema de cálculo de posiciones indicativas y de tecnología relacionada realiza cálculos de posiciones uniformemente basadas en píxeles cuya información de fotorrecepción se ha determinado es superior a un valor liminar predeterminado, no es posible distinguir los píxeles correspondientes a la porción central de la sección fotoemisora de los píxeles correspondientes a la porción periférica de la sección fotoemisora, lo cual impide calcular con exactitud la posición indicativa del indicador. Concretamente, cuando el indicador que comprende el sensor de imágenes se desplaza a gran velocidad, los píxeles correspondientes a la sección fotoemisora pueden dispersarse en la dirección del desplazamiento del indicador, en la imagen captada por el sensor de imágenes. Si la posición indicativa del indicador se calcula basándose en estos píxeles, no es posible obtener un resultado de cálculo exacto.
Tanto EP-AI-0728503 como US-A-6146278 revelan máquinas de juegos de tiro al blanco que comprenden medios para calcular posiciones indicativas con el uso de un único nivel umbral predeterminado como el descrito anteriormente, para determinar las posiciones relativas de una sección fotoemisora y un indicador.
RESUMEN
Según un primer aspecto del presente invento, se aporta un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un controlador, comprendiendo dicho sistema de cálculo de posiciones indicativas:
una sección fotoemisora;
un controlador constituido por una sección de formación de imágenes que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada;
una sección determinativa que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
una sección de cálculo que realiza cálculos de posiciones basándose en
información identificativa de los píxeles efectivos primarios,
donde la sección de cálculo calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de cada uno de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
Según un segundo aspecto del presente invento, se aporta un controlador para un sistema de cálculo de posiciones indicativas, comprendiendo dicho controlador:
una sección de formación de imágenes que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada;
una sección determinativa que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
una sección de cálculo que realiza cálculos de posiciones basándose en información identificativa del píxel efectivo primario, donde la sección de cálculo calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
Según un tercer aspecto del presente invento, se aporta un sistema de juego que calcula una posición indicativa de un controlador, comprendiendo dicho sistema de juego:
una sección de visualización que visualiza un objeto;
una sección fotoemisora que tiene una determinada relación posicional con la sección de visualización;
un controlador constituido por una sección de formación de imágenes que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada;
una sección determinativa que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
una sección de cálculo que realiza cálculos de posiciones basándose en la información identificativa del píxel efectivo primario, donde la sección de cálculo calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
Según un cuarto aspecto del presente invento, se aporta un método de cálculo de posiciones indicativas que comprende:
hacer que una sección de formación de imágenes incorporada a un controlador capte una imagen de una sección fotoemisora y emita información de fotorrecepción de píxeles de la imagen captada;
hacer que una sección determinativa determine si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determine si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
hacer que una sección de cálculo realice cálculos de posiciones basándose en información identificativa del píxel efectivo primario,
donde la sección de cálculo calcula coordenadas centrobáricas de un área determinativa...
Reivindicaciones:
1. Un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un controlador (16), comprendiendo dicho sistema de cálculo de posiciones indicativas:
una sección fotoemisora (15);
un controlador (16) constituido por una sección de formación de imágenes (18) que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada;
una sección determinativa (210) que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
una sección de cálculo (350) que realiza cálculos de posiciones basándose en información identificativa de los píxeles efectivos primarios,
donde la sección de cálculo (350) calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de cada uno de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
2. El sistema de cálculo de posiciones indicativas definido en la
reivindicación 1, donde la sección de formación de imágenes (18) emite sucesivamente la
información de fotorrecepción de los píxeles;
donde el primer píxel cuya información de fotorrecepción se emite queda dispuesto en una parte inferior de la imagen y el último píxel cuya información de fotorrecepción se emite queda dispuesto en una parte superior de la imagen cuando el controlador (16) se mantiene en una posición de referencia; y
donde la sección de cálculo (350) realiza los cálculos de posiciones basándose en la información identificativa de un primer píxel efectivo guardado en una FIFO (340) que contiene píxeles que satisfacen la primera condición a fin de obtener la posición indicativa del controlador cuando los píxeles efectivos primarios y secundarios corresponden a la sección fotoemisora (15) y
donde la sección de cálculo (350) establece el área determinativa como un área en un intervalo predeterminado que incluye el primer píxel efectivo, y realiza los cálculos de posiciones basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en el área determinativa.
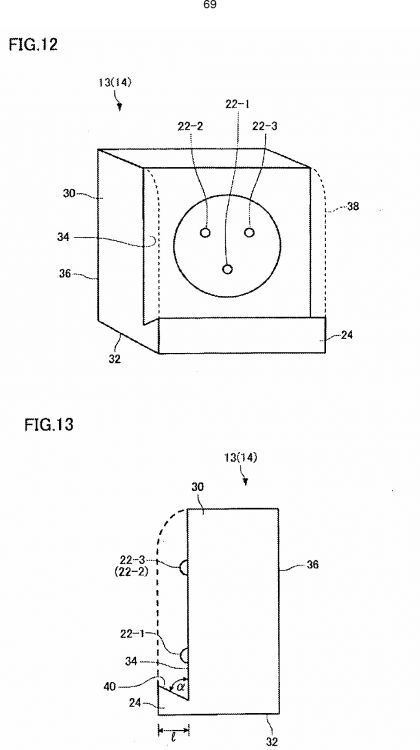
3. El sistema de cálculo de posiciones indicativas definido en la reivindicación 2, que comprende: diversas secciones fotoemisoras (13, 14) que tienen una relación posicional predeterminada entre sí,
donde la sección de cálculo (350) establece un área predeterminada de la imagen que incluye el primer píxel efectivo como primera área determinativa, establece otra área predeterminada de la imagen que incluye un segundo píxel efectivo que se ha determinado primariamente satisface la primera condición entre los píxeles procedentes de la primera área determinativa como segunda área determinativa, y seguidamente realiza los cálculos de posiciones basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en la primera área determinativa y la segunda área determinativa.
4. El sistema de cálculo de posiciones indicativas definido en cualquiera de las reivindicaciones 1 a 3, que comprende:
una sección protectora (24) dispuesta en la sección fotoemisora (15) y la parte protectora de la luz procedente de la sección fotoemisora (15) emitida hacia abajo en un ángulo de una graduación determinada o inferior desde la horizontal.
5. El sistema de cálculo de posiciones indicativas definido en la reivindicación 4,
donde la sección protectora (24) se dispone en una posición que permita a la sección protectora (24) proteger contra parte de la luz procedente de la sección fotoemisora (15) y emitida hacia abajo desde la horizontal de manera que ninguna luz reflejada procedente del espacio inferior penetre en la sección de formación de imágenes (18) cuando la sección fotoemisora (15) y la sección de formación de imágenes (18) tengan una determinada relación posicional de referencia.
6. El sistema de cálculo de posiciones indicativas definido en cualquiera de las reivindicaciones 1 a 3,
donde la sección fotoemisora (15) se dirige en una dirección que permita impedir la emisión de luz procedente de la sección fotoemisora (15) hacia abajo desde la horizontal de manera que ninguna luz reflejada procedente del espacio inferior penetre en la sección de formación de imágenes (18) cuando la sección fotoemisora (15) y la sección de formación de imágenes (18) tengan una determinada relación posicional de referencia.
7. El sistema de cálculo de posiciones indicativas definido en cualquiera de las reivindicaciones 1 a 6, que comprende:
un filtro (FI) dispuesto en el controlador (16) y a través del cual se permite que pase, hacia la sección de formación de imágenes (18), luz en la misma banda de longitudes de onda que la luz procedente de la sección fotoemisora (15).
8. El sistema de cálculo de posiciones indicativas definido en cualquiera de las reivindicaciones 1 a 7, que comprende:
diversas secciones fotoemisoras (13, 14) que tienen una relación posicional predeterminada entre sí,
donde la sección de cálculo (350) realiza los cálculos de posiciones basándose en coordenadas centrobáricas correspondientes a cada una de las secciones fotoemisoras (13, 14).
9. Un controlador (16) para un sistema de cálculo de posiciones indicativas, comprendiendo dicho controlador (16): una sección de formación de imágenes (18) que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada;
una sección determinativa (210) que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
una sección de cálculo (350) que realiza cálculos de posiciones basándose en información identificativa del píxel efectivo primario, donde la sección de cálculo (350) calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
10. Un sistema de juego que calcula una posición indicativa de un
controlador (16), comprendiendo dicho sistema de juego:
una sección de visualización (12) que visualiza un objeto;
una sección fotoemisora (15) que tiene una determinada relación
posicional con la sección de visualización (12);
un controlador (16) constituido por una sección de formación de imágenes (18) que capta una imagen y emite información de fotorrecepción de píxeles de la imagen captada;
una sección determinativa (210) que determina si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determina si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
una sección de cálculo (350) que realiza cálculos de posiciones basándose en información identificativa del píxel efectivo primario, donde la sección de cálculo (350) calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
11. Un método de cálculo de posiciones indicativas que comprende:
hacer que una sección de formación de imágenes (18) incorporada a un controlador (16) capte una imagen de una sección fotoemisora (15) y emita información de fotorrecepción de píxeles de la imagen captada;
hacer que una sección determinativa (210) determine si cada uno de los píxeles es un píxel efectivo primario que satisface una primera condición cuando un valor de la información de fotorrecepción supera un primer valor liminar, y seguidamente determine si el píxel efectivo primario es un píxel efectivo secundario que satisface una segunda condición cuando el valor de la información de fotorrecepción también supera un segundo valor liminar superior al primer valor liminar; y
hacer que una sección de cálculo (350) realice cálculos de posiciones basándose en información identificativa del píxel efectivo primario, donde la sección de cálculo (350) calcula coordenadas centrobáricas de un área determinativa basándose en la información identificativa de los píxeles efectivos primarios y secundarios incluidos en el área determinativa, mientras hace la ponderación de la información identificativa de los píxeles efectivos secundarios mayor que la ponderación de la información identificativa de los píxeles efectivos primarios en proceso de cálculo, y seguidamente realiza los cálculos de posición basándose en las coordenadas centrobáricas.
Patentes similares o relacionadas:
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]
Métodos y aparatos para determinar una posición utilizando fuentes de luz, del 20 de Septiembre de 2017, de THE BOEING COMPANY: Un método, que comprende: procesar, a través de un circuito lógico que comprende una pluralidad de extractores de código, una salida de un fotodetector […]
Sistema y procedimiento para averiguar una posición de un objeto móvil, disposición de ledes de iluminación general y sensor de luz para una averiguación de posición de un objeto móvil, del 28 de Septiembre de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Sistema para averiguar una posición de un objeto móvil , con las siguientes características: una disposición de al menos tres ledes de iluminación […]
Método y sistema para determinar una posición relativa con respecto a un objetivo, del 20 de Abril de 2016, de AIRBUS DEFENCE AND SPACE, S.A.U: Método para determinar la dirección angular relativa θ entre un objetivo y un transmisor , comprendiendo el método las siguientes etapas: […]
 Determinación de distancia o posición, del 16 de Marzo de 2016, de Philips Lighting Holding B.V: Un dispositivo que comprende:
una entrada para recibir datos de imagen capturados por una cámara , comprendiendo los datos de imagen una imagen de una fuente […]
Determinación de distancia o posición, del 16 de Marzo de 2016, de Philips Lighting Holding B.V: Un dispositivo que comprende:
una entrada para recibir datos de imagen capturados por una cámara , comprendiendo los datos de imagen una imagen de una fuente […]
 Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz, del 26 de Mayo de 2015, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz que comprende obtener un mapa de puntos de luz de un recinto; […]
Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz, del 26 de Mayo de 2015, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz que comprende obtener un mapa de puntos de luz de un recinto; […]
 Método, sistema y producto informático para la orientación espacial de personas, del 21 de Mayo de 2015, de BRUSILOVSKY FILER, Berta Liliana: Método, un sistema y un producto informático para la orientación espacial de personas, aplicable a teléfonos móviles inteligentes, para la orientación en espacios urbanos o edificados […]
Método, sistema y producto informático para la orientación espacial de personas, del 21 de Mayo de 2015, de BRUSILOVSKY FILER, Berta Liliana: Método, un sistema y un producto informático para la orientación espacial de personas, aplicable a teléfonos móviles inteligentes, para la orientación en espacios urbanos o edificados […]
Sistema de guiado de un dron en fase de aproximación a una plataforma en particular naval con vistas a su aterrizaje, del 11 de Diciembre de 2013, de DCNS: Sistema de guiado de un dron en fase de aproximación a una plataforma con vistas a su aterrizaje, quecomprende una cámara , conectada a unos medios de análisis […]